TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025009907
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2024095461
出願日
2024-06-12
発明の名称
測定機器、計測システム、計測演算装置、計測演算方法および計測演算プログラム
出願人
株式会社小野測器
代理人
弁理士法人磯野国際特許商標事務所
主分類
G06F
17/17 20060101AFI20250109BHJP(計算;計数)
要約
【課題】計測データの削減を図りつつ、元の信号の復元率を高くする。
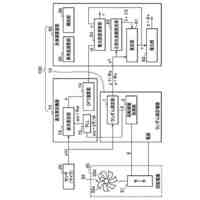
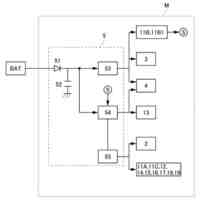
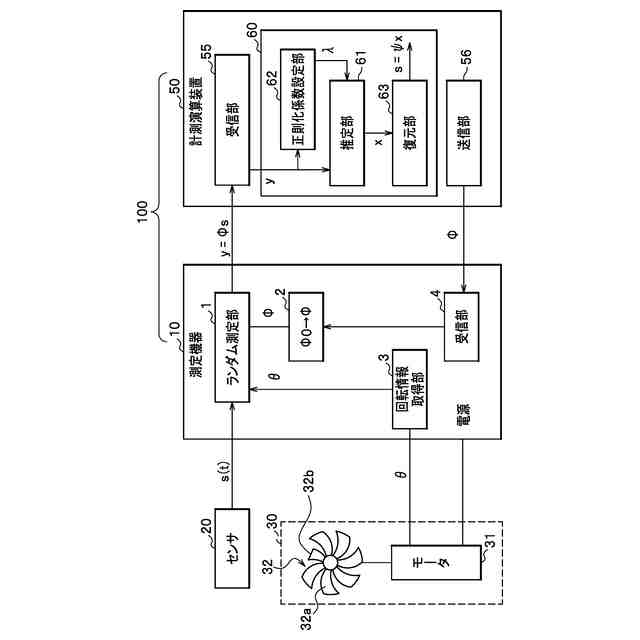
【解決手段】回転電機30の回転位相θの情報に対応して変化する被測定信号s(t)を第1ランダム行列Φに基づいて、回転位置に同期してランダムに測定するランダム測定部1と、ランダムに測定したランダム測定値をベクトル表現したランダム測定ベクトルyと第1ランダム行列Φとを計測演算装置50に送信する測定機器10と、LASSOの手法を用いて、ランダム測定ベクトルyを基底ベクトル{Ψ
i
}を列とするn×nの直交基底行列ψの係数x={x
i
}を推定する推定部61と、を有する計測演算装置50と、を通信可能に接続した。
【選択図】図1
特許請求の範囲
【請求項1】
回転機械の回転位置または回転速度の情報を取得する回転情報取得部と、
前記回転位置または回転速度に対応して変化する被測定信号を所定の第1ランダム行列Φに基づいて、前記回転位置または回転速度に同期してランダムに測定する測定部と
を備えたことを特徴とする測定機器。
続きを表示(約 2,400 文字)
【請求項2】
回転機械の回転位置または回転速度の情報を取得する回転情報取得部と、前記回転位置または回転速度に対応して変化する被測定信号を所定の第1ランダム行列Φに基づいて、前記回転位置または回転速度に同期してランダムに測定する測定部と、前記ランダムに測定したランダム測定値をベクトル表現したランダム測定ベクトルyと前記第1ランダム行列Φとを計測演算装置に送信する送信部とを備えた測定機器と、
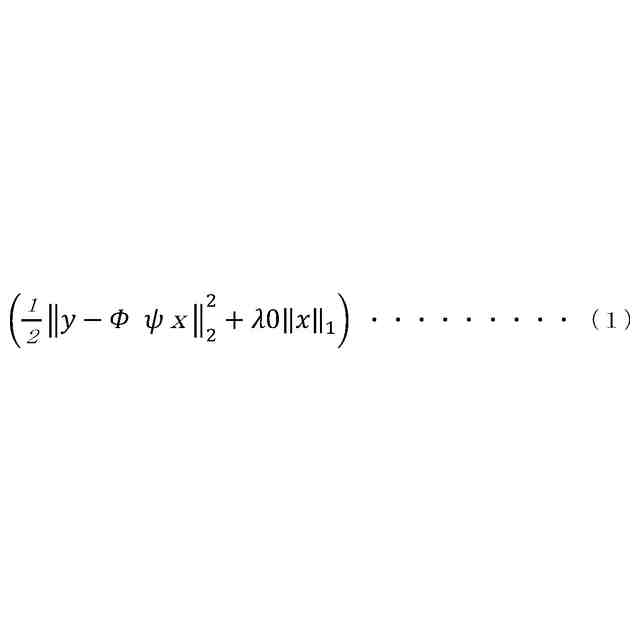
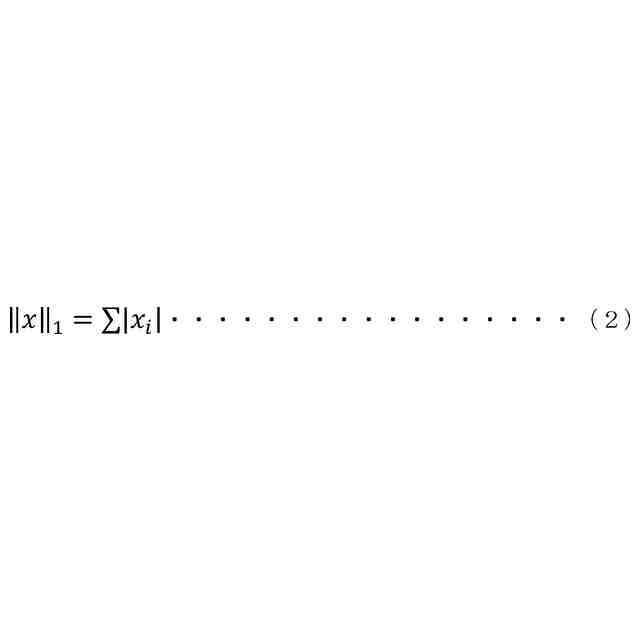
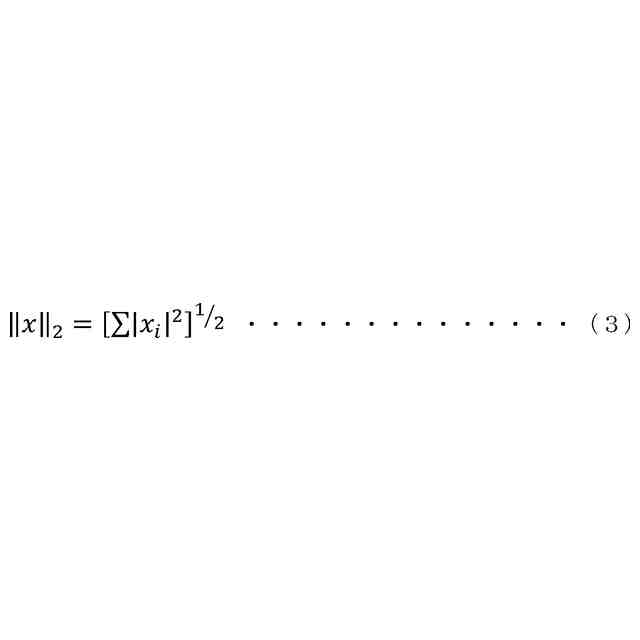
前記ランダム測定ベクトルyを前記測定機器から受信する受信部と、前記ランダム測定ベクトルyを、前記第1ランダム行列Φと基底ベクトル{Ψ
i
}を列とするn×nの直交基底行列ψとその係数xとの積Φψxで表現したとき、正則化係数λ0として、式(1)、式(2)で定義した式(3)が最小となるように、直交基底行列ψの係数x={x
i
}を推定する推定部と、を有する計測演算装置と、
を通信可能に接続した計測システム。
TIFF
2025009907000005.tif
13
166
TIFF
2025009907000006.tif
14
166
TIFF
2025009907000007.tif
14
166
【請求項3】
回転機械の回転位置または回転速度に対応して変化する被測定信号を、所定の第1ランダム行列Φに基づいて、該回転位置または回転速度に同期してランダムに測定したランダム測定値を測定機器から受信する受信部と、
前記ランダム測定値をベクトル表現したランダム測定ベクトルyを、前記第1ランダム行列Φと基底ベクトル{Ψ
i
}を列とするn×nの直交基底行列ψとその係数xとの積Φψxで表現したとき、正則化係数λ0として、式(4)、式(5)で定義した式(6)が最小となるように、直交基底行列ψの係数x={x
i
}を推定する推定部と、
を有することを特徴とする計測演算装置。
TIFF
2025009907000008.tif
13
166
TIFF
2025009907000009.tif
14
166
TIFF
2025009907000010.tif
14
166
【請求項4】
前記推定部が係数xを推定する前に、予め、前記ランダム測定ベクトルyおよび任意の第2ランダム行列に基づいて、最も誤差が少ない正則化係数λにおける交差検証の標準偏差以内で最大値になるように、前記正則化係数λ0を事前決定する正則化係数設定部と、
前記第2ランダム行列を、前記第1ランダム行列Φとして前記測定機器に設定させる設定部と、
をさらに備えることを特徴とする請求項3に記載の計測演算装置。
【請求項5】
前記第1ランダム行列Φは、前記被測定信号をランダムに間引いたことを示す行列であり、
最も誤差が少ない正則化係数λにおける交差検証の標準偏差以内で最大値になる前記正則化係数λ0を決定する正則化係数設定部をさらに備える
ことを特徴とする請求項3に記載の計測演算装置。
【請求項6】
前記基底ベクトル{Ψ
i
}は、前記回転位置を変数とするフーリエ基底ベクトルであり、
前記係数xは、フーリエ係数である
ことを特徴とする請求項3に記載の計測演算装置。
【請求項7】
回転機械の回転位置または回転速度に対応して変化する被測定信号を、所定の第1ランダム行列Φに基づいて、該回転位置または回転速度に同期してランダムに測定したランダム測定値を測定機器から受信する受信過程と、
前記ランダム測定値をベクトル表現したランダム測定ベクトルyを、前記第1ランダム行列Φと基底ベクトル{Ψ
i
}を列とするn×nの直交基底行列ψとその係数xとの積Φψxで表現したとき、正則化係数λ0として、式(7)、式(8)で定義した式(9)
が最小となるように、直交基底行列ψの係数x={x
i
}を推定する推定過程と、
を有することを特徴とする計測演算方法。
TIFF
2025009907000011.tif
13
166
TIFF
2025009907000012.tif
11
158
TIFF
2025009907000013.tif
14
158
【請求項8】
回転機械の回転位置または回転速度に対応して変化する被測定信号を、所定の第1ランダム行列Φに基づいて、該回転位置または回転速度に同期してランダムに測定したランダム測定値を測定機器から受信する受信過程と、
前記ランダム測定値をベクトル表現したランダム測定ベクトルyを、前記第1ランダム行列Φと基底ベクトル{Ψ
i
}を列とするn×nの直交基底行列ψとその係数xとの積Φψxで表現したとき、正則化係数λ0として、式(10)、式(11)で定義した式(12)が最小となるように、
直交基底行列ψの係数x={x
i
}を推定する推定過程と、
をコンピュータに実行させることを特徴とする計測演算プログラム。
TIFF
2025009907000014.tif
12
158
TIFF
2025009907000015.tif
13
158
TIFF
2025009907000016.tif
15
158
発明の詳細な説明
【技術分野】
【0001】
本発明は、測定機器、計測システム、計測演算装置、計測演算方法および計測演算プログラムに関し、例えば、回転機械の特性を測定する測定機器に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
回転機械は、材料の欠陥、疲労や経年変化などにより必然的に故障する。故障が生じると、機器のダウンタイムにつながり、経済的損失が生まれてしまう。そのため、回転機械の故障診断を行い、健康な状態に保つことが重要となる。回転機械の故障診断は様々なセンシング方法により実施されている。
【0003】
例えば、非特許文献1には、圧縮センシング技術と、計測開始時間をランダムとして一定周波数での計測する手法(Random Start Uniform Sampling Method,以降RSUSM)とを組み合わせた技術が開示されている。圧縮センシング理論は、計測データがある基底(例えば、フーリエ基底)に対してスパース性を有すること、基底がインコヒーレントであること(Random sampling を行うこと)という条件を満たすなら、通常必要とされるよりもはるかに少ない測定データから信号を正確に復元することができる技術である。これにより、非特許文献1の技術では、モニタリングに必要な計測データを削減している。
また、特許文献1には、センサにIDを振り、サーバシステムで集中管理をしつつ、状況に合わせて温度補整や直線性を補整処理する計測データ提供サービスシステムが開示されている。
【先行技術文献】
【非特許文献】
【0004】
加藤由幹,“サブナイキストサンプリングと圧縮センシングを用いたプロペラの故障診断”,日本機械学会第19回評価・診断に関するシンポジウム,2021年12月2-3日(開催日)
【特許文献】
【0005】
特許6252669号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
非特許文献1で使用している圧縮センシング理論は、計測データがフーリエ基底に対してスパース性を有することが必要である。しかしながら、周波数スペクトルが広がってしまい(つまり、スパース性が低い)、必要な精度で元の信号を復元することができないことがある。
【0007】
本発明は上記問題点に鑑みてなされたものであり、計測データの削減を図りつつ、元の信号の復元率を高くすることができる測定機器、計測システム、計測演算装置、計測演算方法および計測演算プログラムを提供することにある。
【課題を解決するための手段】
【0008】
本発明の上記課題は、下記の手段により解決される。
回転機械(回転電機を含む。)の回転位置または回転速度の情報を取得する回転情報取得部と、前記回転位置または回転速度に対応して変化する被測定信号を所定の第1ランダム行列Φに基づいて、前記回転位置または回転速度に同期してランダムに測定する測定部とを備えたことを特徴とする測定機器。
【発明の効果】
【0009】
本発明によれば、計測データの削減を図りつつ、元の信号の復元率を高くすることができる。
【図面の簡単な説明】
【0010】
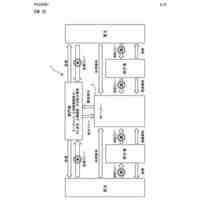
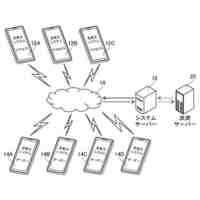
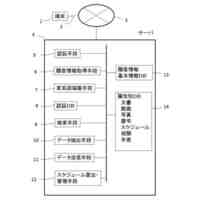
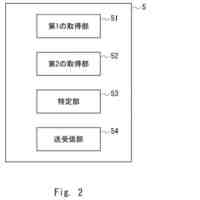
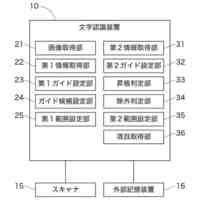
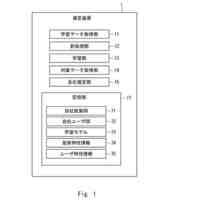
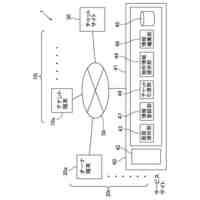
本発明の第1実施形態である計測システムの構成図である。
回転速度の高低による被測定信号の差異を説明するための図である。
被測定信号の時間変化を示す図である。
回転機械の回転位相の時間変化を示す図である。
被測定信号と回転位相との関係を示す図である。
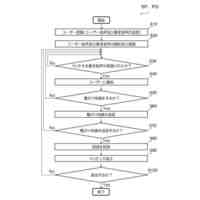
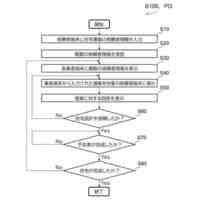
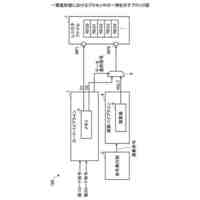
本発明の第1実施形態である計測システムの動作を説明するためのフローチャートである。
本発明の第1比較例である計測システムの構成図である。
第1比較例の計測システムで測定した、正常なプロペラの振動の周波数特性である。
本発明の実施形態である計測システムで測定した、正常なプロペラの振動の次数特性である。
第1比較例の計測システムで測定した、1本の羽根が半損したプロペラの振動の周波数特性である。
本発明の第1実施形態である計測システムで測定した、1本の羽根が半損したプロペラの振動の次数特性である。
第1比較例の計測システムで測定した、1本の羽根が全損したプロペラの振動の周波数特性である。
本発明の第1実施形態である計測システムで測定した、1本の羽根が全損したプロペラの振動の次数特性である。
本発明の第2比較例である計測システムの構成図である。
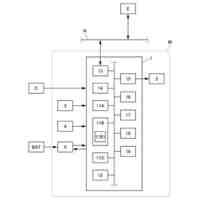
本発明の第2実施形態の計測システムの構成図である。
汎用マイクおよび計測用マイクの周波数特性を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小野測器
計測システム、計測演算装置、計測演算方法および計測演算プログラム
21日前
株式会社小野測器
測定機器、計測システム、計測演算装置、計測演算方法および計測演算プログラム
21日前
個人
情報提示方法
18日前
個人
自動精算システム
26日前
個人
自動精算システム
2か月前
個人
プログラム
10日前
個人
RFタグ読取装置
1か月前
個人
プログラム
17日前
個人
アカウントマップ
11日前
個人
売買システム
1か月前
個人
管理サーバ
1か月前
個人
救急搬送システム
2か月前
個人
発想支援方法及びシステム
21日前
個人
市場受発注システム
24日前
個人
分類処理プログラム及び方法
21日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
個人
学習装置及び推論装置
10日前
キヤノン株式会社
印刷装置
2か月前
株式会社発明屋
電池指向の構造設計
4日前
井関農機株式会社
ロボット作業車両
26日前
富士通株式会社
金融システム
18日前
個人
生成AIとの常時接続システム
2か月前
個人
VRによる人体各部位の立体化
1か月前
個人
未来型家系図構築システム
1か月前
トヨタ自動車株式会社
管理装置
5日前
株式会社SEKT
文字認識装置
1か月前
個人
コンテンツ開示順位判定システム
2か月前
キヤノン株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
推定装置
1か月前
株式会社COLORS
表示装置
2か月前
キヤノン電子株式会社
業務管理システム
2か月前
株式会社プレニーズ
仲介システム
11日前
トヨタ自動車株式会社
表認識装置
1か月前
富士通株式会社
プロセッサ
3日前
個人
情報処理装置およびプログラム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ