TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025004521
公報種別
公開特許公報(A)
公開日
2025-01-15
出願番号
2023104253
出願日
2023-06-26
発明の名称
作業車制御システム
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250107BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】障害物が存在すると判定されたことによって作業車の走行が停止した後、その障害物が走行に対する妨げとはならないにもかかわらず自動走行を再開できない事態を回避しやすい作業車制御システムを提供する。
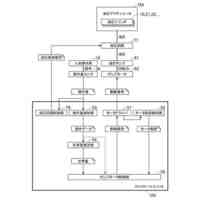
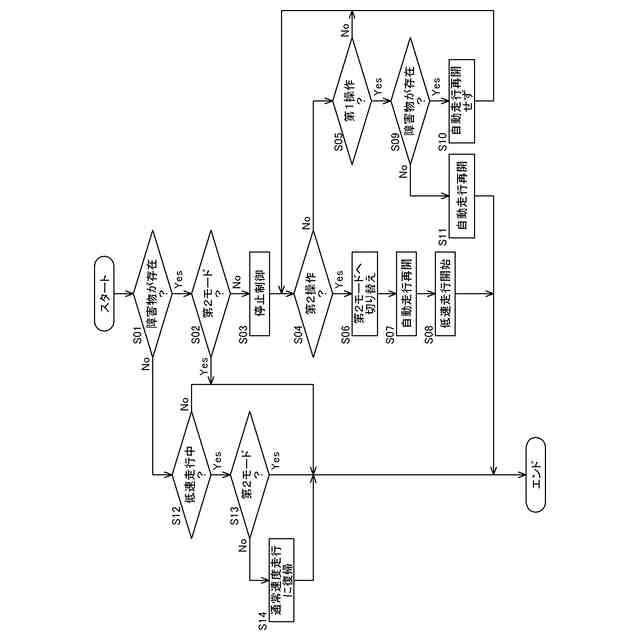
【解決手段】作業車が自動走行しているときにおいて、制御モードが第1モードであり、且つ、障害物判定部によって障害物が存在すると判定された場合、走行制御部は、作業車の走行を停止する制御である停止制御を実行し、停止制御が実行された後に受付部が所定操作入力を受け付けた場合、モード切替部が制御モードを第1モードから第2モードへ切り替えると共に、走行制御部により作業車の自動走行が再開され、作業車が自動走行しているときにおいて、制御モードが第2モードである場合、停止制御は実行されない。
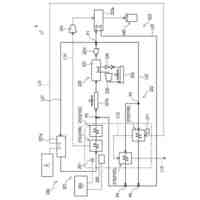
【選択図】図5
特許請求の範囲
【請求項1】
自動走行が可能な作業車の走行を制御する作業車制御システムであって、
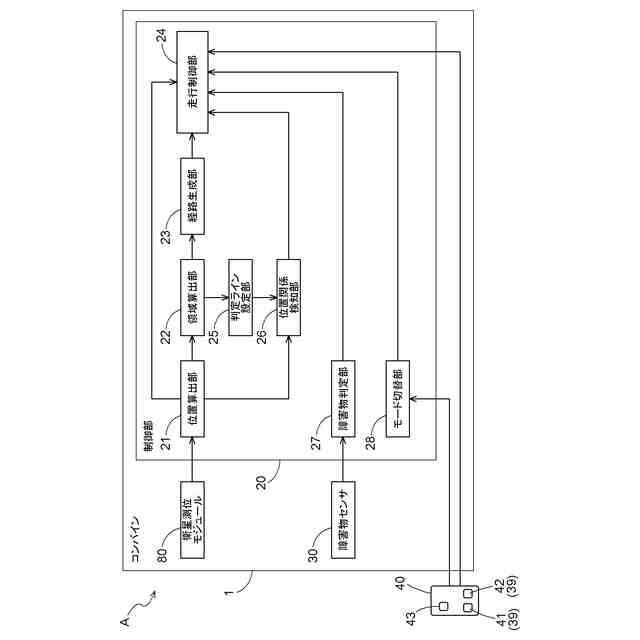
前記作業車の周囲に障害物が存在するか否かを判定する障害物判定部と、
前記作業車の走行を制御する走行制御部と、
前記走行制御部の制御モードを第1モードと第2モードとの間で切り替えるモード切替部と、
人為的な操作入力を受け付ける受付部と、を備え、
前記作業車が自動走行しているときにおいて、前記制御モードが前記第1モードであり、且つ、前記障害物判定部によって前記障害物が存在すると判定された場合、前記走行制御部は、前記作業車の走行を停止する制御である停止制御を実行し、
前記停止制御が実行された後に前記受付部が所定操作入力を受け付けた場合、前記モード切替部が前記制御モードを前記第1モードから前記第2モードへ切り替えると共に、前記走行制御部により前記作業車の自動走行が再開され、
前記作業車が自動走行しているときにおいて、前記制御モードが前記第2モードである場合、前記停止制御は実行されない作業車制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記作業車は、前記作業車に人が搭乗していない状態での自動走行が可能であるように構成されており、
前記受付部は、前記作業車の自動走行に関する操作を遠隔で行うことが可能な遠隔操作装置である請求項1に記載の作業車制御システム。
【請求項3】
前記作業車が自動走行を行っていないときに、前記受付部の有する操作具が第1操作を受け付けた場合、前記走行制御部により前記作業車の自動走行が開始され、
前記所定操作入力は、前記操作具に対する第2操作であり、
前記第1操作と前記第2操作とは互いに異なる請求項1または2に記載の作業車制御システム。
【請求項4】
前記第2操作の少なくとも一部は、長押し操作である請求項3に記載の作業車制御システム。
【請求項5】
前記操作具は、複数のボタンにより構成されている請求項4に記載の作業車制御システム。
【請求項6】
前記モード切替部が前記制御モードを前記第1モードから前記第2モードへ切り替えた後、前記モード切替部は、前記受付部の有する操作具が操作されている間に亘って前記制御モードが前記第2モードであり、前記操作具が操作されていない状態となったことに応じて前記制御モードが前記第2モードから前記第1モードに切り替わるように、前記制御モードの切り替えを実行する請求項1または2に記載の作業車制御システム。
【請求項7】
前記走行制御部は、前記制御モードが前記第2モードである場合の前記作業車の自動走行中の走行速度が、前記制御モードが前記第1モードである場合の前記作業車の自動走行中の走行速度よりも遅くなるように、前記作業車の走行を制御する請求項1または2に記載の作業車制御システム。
【請求項8】
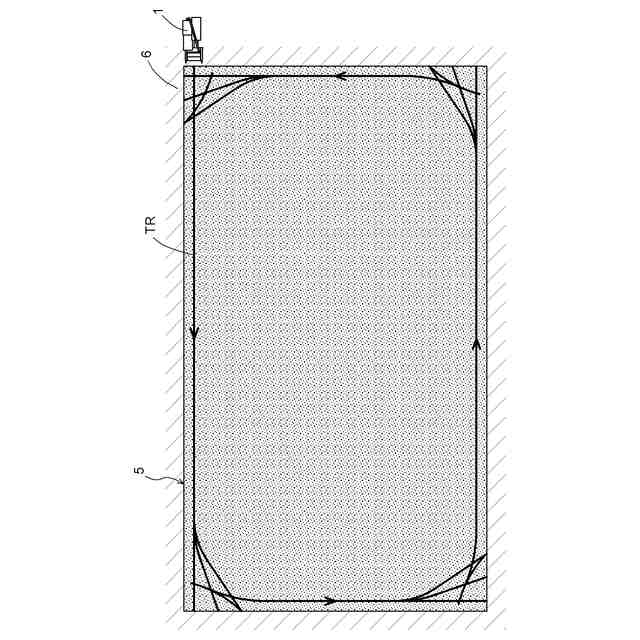
圃場を囲む状態で設けられた圃場外縁部と前記圃場との境界の周辺に設定された判定ラインを記憶する記憶部と、
前記作業車と前記判定ラインとの位置関係を検知する位置関係検知部と、を備え、
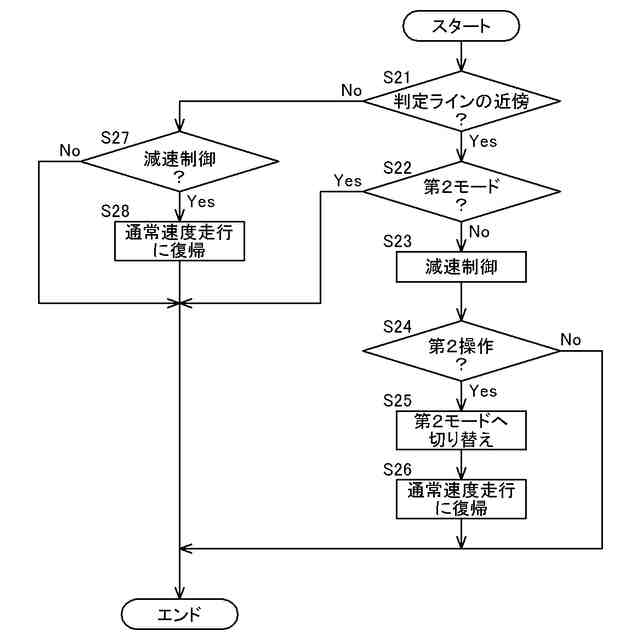
前記作業車が自動走行しており、且つ、前記制御モードが前記第1モードであるとき、前記走行制御部は、前記位置関係検知部による検知結果に応じて、前記作業車が前記判定ラインの外側へ出ることが抑制されるように前記作業車の車速を減少させる制御である減速制御を実行するように構成されており、
前記減速制御が実行された後に前記受付部が前記所定操作入力を受け付けた場合、前記モード切替部は、前記制御モードを前記第1モードから前記第2モードへ切り替え、
前記作業車が自動走行しているときにおいて、前記制御モードが前記第2モードである場合、前記減速制御は実行されない請求項1または2に記載の作業車制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動走行が可能な作業車の走行を制御する作業車制御システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
上記のような作業車制御システムとして、例えば、特許文献1に記載のものが既に知られている。この作業車制御システムは、自動走行が可能な作業車(特許文献1では「無人走行車」)の走行を制御する作業車制御システムであり、作業車の前方に障害物が存在するか否かを判定する障害物判定部(特許文献1では「CPU」)を備えている。
【0003】
そして、この作業車制御システムは、作業車の前方に障害物が存在すると判定した場合、作業車の走行を停止させる。
【先行技術文献】
【特許文献】
【0004】
特開平8-19号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
自動走行中の作業車の周囲に障害物が存在すると判定された場合であっても、実際には、その障害物は作業車の走行に対する妨げとはならないこともある。
【0006】
しかしながら、上述の作業車制御システムにおいては、障害物が存在すると判定されたことによって作業車の走行が停止した後、その障害物が走行に対する妨げとはならないにもかかわらず、障害物が存在すると判定され続けることにより、自動走行を再開できない事態が想定される。その結果、作業車による作業の効率が低下してしまう。
【0007】
本発明の目的は、障害物が存在すると判定されたことによって作業車の走行が停止した後、その障害物が走行に対する妨げとはならないにもかかわらず自動走行を再開できない事態を回避しやすい作業車制御システムを提供することである。
【課題を解決するための手段】
【0008】
本発明の特徴は、自動走行が可能な作業車の走行を制御する作業車制御システムであって、前記作業車の周囲に障害物が存在するか否かを判定する障害物判定部と、前記作業車の走行を制御する走行制御部と、前記走行制御部の制御モードを第1モードと第2モードとの間で切り替えるモード切替部と、人為的な操作入力を受け付ける受付部と、を備え、前記作業車が自動走行しているときにおいて、前記制御モードが前記第1モードであり、且つ、前記障害物判定部によって前記障害物が存在すると判定された場合、前記走行制御部は、前記作業車の走行を停止する制御である停止制御を実行し、前記停止制御が実行された後に前記受付部が所定操作入力を受け付けた場合、前記モード切替部が前記制御モードを前記第1モードから前記第2モードへ切り替えると共に、前記走行制御部により前記作業車の自動走行が再開され、前記作業車が自動走行しているときにおいて、前記制御モードが前記第2モードである場合、前記停止制御は実行されないことにある。
【0009】
本構成によれば、障害物が存在すると判定されることによって停止制御が実行された後、その障害物が作業車の走行に対する妨げとはならないとユーザーが判断した際には、ユーザーが所定操作入力を行えば、走行制御部が第2モードとなると共に、作業車の自動走行が再開される。そして、走行制御部が第2モードである場合、停止制御は実行されない。
【0010】
これにより、障害物が存在すると判定されたことによって作業車の走行が停止した後、その障害物が走行に対する妨げとはならないにもかかわらず自動走行を再開できない事態を回避しやすい作業車制御システムを実現できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
排気ガス浄化システム
5日前
株式会社クボタ
排気ガス浄化システム
5日前
株式会社クボタ
排気ガス浄化システム
5日前
株式会社クボタ
排気ガス浄化システム
5日前
株式会社クボタ
排気ガス浄化システム
5日前
株式会社クボタ
水処理設備および水処理方法
5日前
株式会社クボタケミックス
切削工具、切削方法及び施工方法
5日前
個人
除草具
9日前
個人
ベアスタンガン
9日前
井関農機株式会社
収穫機
12日前
井関農機株式会社
収穫機
12日前
個人
ペット用玩具
6日前
個人
獣罠捕獲検知システム
9日前
個人
根掛りしないイカ用疑似餌
9日前
井関農機株式会社
作業車両
12日前
日産化学株式会社
農薬粒状組成物
14日前
株式会社エスク
鳥獣忌避装置
9日前
株式会社サクマ
植物収容構造
12日前
みのる産業株式会社
移植装置
6日前
株式会社東海化成
ポット保持具
5日前
井関農機株式会社
作業車両
12日前
AGRIST株式会社
収穫装置
2日前
株式会社タカキタ
収穫機の前処理装置
12日前
個人
四足歩行動物用被服パターンの設計方法
12日前
有限会社吉田モールド
浮釣り遠投カゴ
13日前
株式会社タカキタ
収穫機の前処理装置
13日前
株式会社クボタ
作業機
13日前
日本製紙クレシア株式会社
ペット用吸収性物品
12日前
株式会社クボタ
コンバイン
12日前
株式会社クボタ
コンバイン
12日前
株式会社クボタケミックス
弁装置
6日前
株式会社シマノ
ルアー
9日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ