TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025003137
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103641
出願日
2023-06-23
発明の名称
車両の制御方法及び車両の制御装置
出願人
日産自動車株式会社
代理人
弁理士法人後藤特許事務所
主分類
H02P
21/00 20160101AFI20241226BHJP(電力の発電,変換,配電)
要約
【課題】意図しないトルクの発生を抑制できるd軸電流制御を実現する車両の制御装置を提供する。
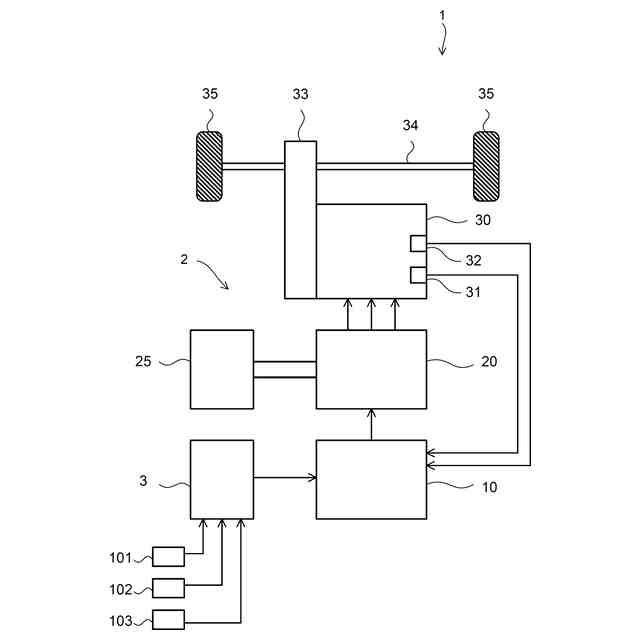
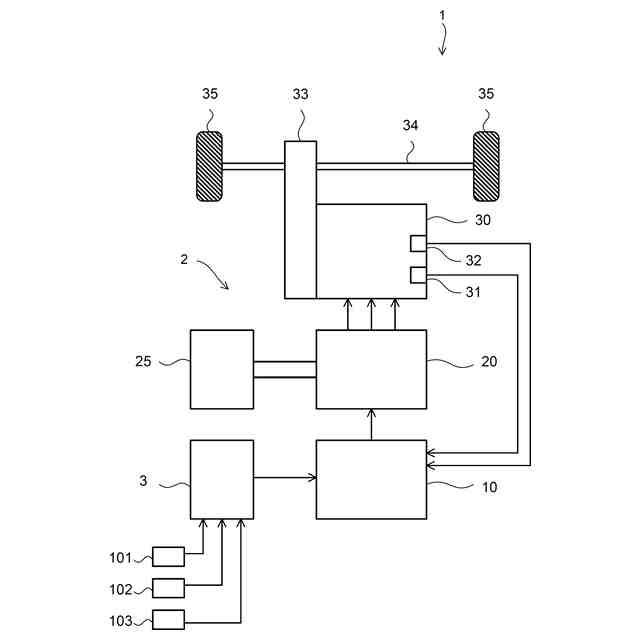
【解決手段】電動モータ(30)には回転子の回転角度を検出する回転角度検出手段(31)が備えられ、電動モータ(30)が出力する出力トルクを、電動モータ(30)の磁石磁束、d軸インダクタンス、q軸インダクタンス及び回転角度を用いて、d軸電流指令値及びq軸電流指令値を設定することで制御し、車両(1)の停車時において、電動モータ(30)のd軸電流のみを流す制御を行う場合に、d軸電流指令値を正の値に設定すると共にq軸電流指令値を0に設定し、予め設定された回転角度の検出誤差を用いて電動モータに発生する発生トルクが、所定の許容トルクを超えないように、d軸電流指令値を設定する。
【選択図】 図1
特許請求の範囲
【請求項1】
電動モータと前記電動モータに電力を供給する電力変換装置とを備える車両の制御方法であって、
前記電動モータには、回転子の回転角度を検出する回転角度検出手段が備えられ、
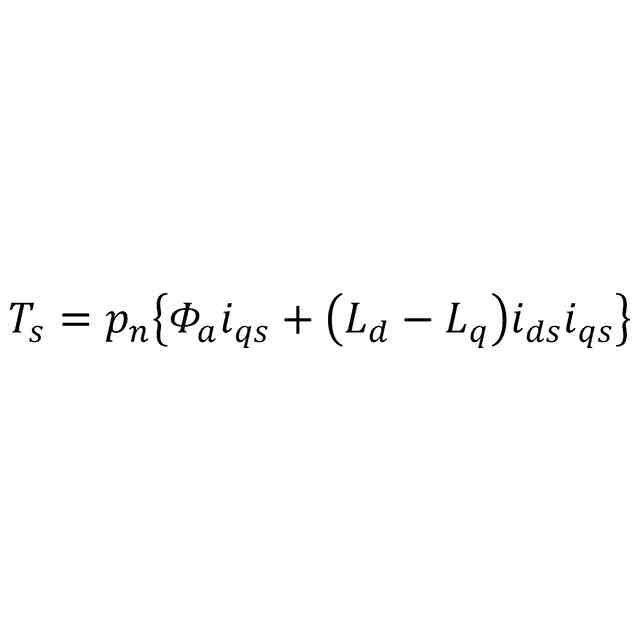
前記電動モータが出力する出力トルクを、前記電動モータの磁石磁束、d軸インダクタンス、q軸インダクタンス及び前記回転角度を用いて、d軸電流指令値及びq軸電流指令値を設定することで制御し、
前記車両の停車時において、前記電動モータのd軸電流のみを流す制御を行う場合に、
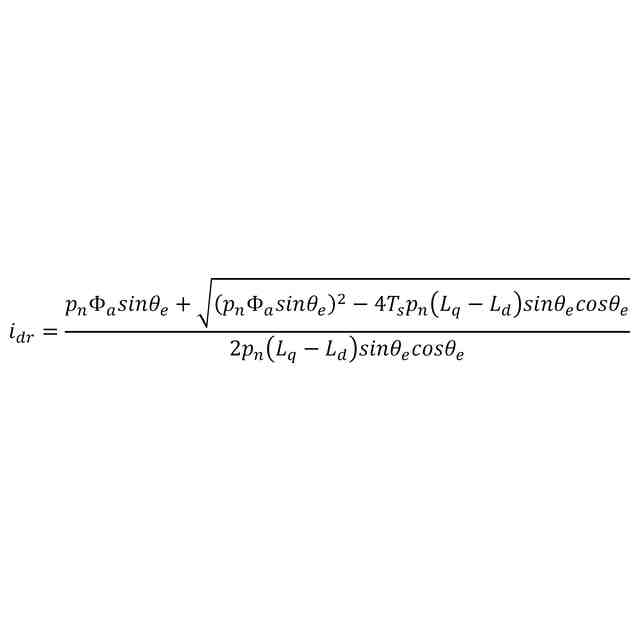
前記d軸電流指令値を正の値に設定すると共に前記q軸電流指令値を0に設定し、予め設定された前記回転角度の検出誤差を用いて前記電動モータに発生する発生トルクが、所定の許容トルクを超えないように、前記d軸電流指令値を設定する、
車両の制御方法。
続きを表示(約 920 文字)
【請求項2】
請求項1に記載の車両の制御方法であって、
前記検出誤差は、前記回転角度検出手段が検出する前記回転子の回転角度の検出誤差の最大値に基づいて設定される、
車両の制御方法。
【請求項3】
請求項1に記載の車両の制御方法であって、
前記許容トルクは、前記車両の停車状態に応じて設定される、
車両の制御方法。
【請求項4】
請求項3に記載の車両の制御方法であって、
前記許容トルクは、前記車両のパークロックの作動状態及び前記車両のフットブレーキの作動状態の少なくとも一方に基づいて設定される、
車両の制御方法。
【請求項5】
請求項1に記載の車両の制御方法であって、
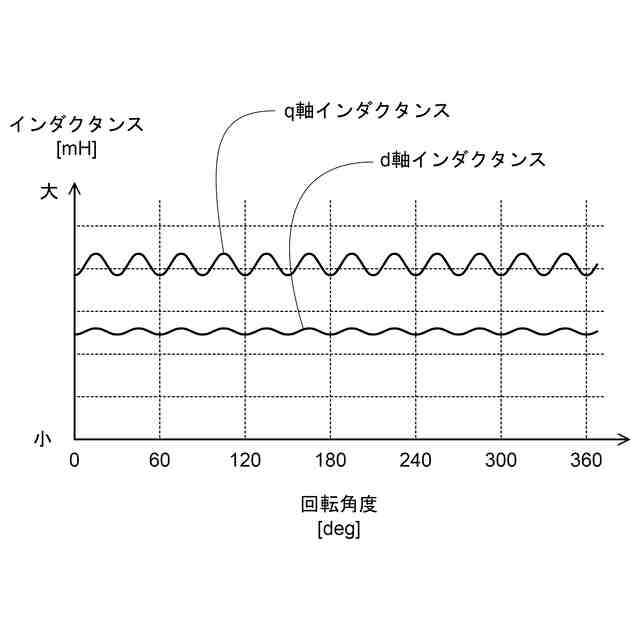
前記d軸電流指令値を設定するとき、前記d軸インダクタンス及び前記q軸インダクタンスは、検出された前記回転角度に応じてその値が設定される、
車両の制御方法。
【請求項6】
請求項5に記載の車両の制御方法であって、
前記電動モータの磁石磁束は、前記電動モータの温度に応じてその値が設定される、
車両の制御方法。
【請求項7】
電動モータと前記電動モータに電力を供給する電力変換装置とを備える車両において、前記電動モータの動作を制御する車両の制御装置であって、
前記電動モータには、回転角度を検出する回転角度検出手段が備えられ、
前記制御装置は、
前記電動モータが出力する出力トルクを、前記電動モータの磁石磁束、d軸インダクタンス、q軸インダクタンス及び前記回転角度を用いて、d軸電流指令値及びq軸電流指令値を設定することで制御し、
前記車両の停車時において、前記電動モータのd軸電流のみを流す制御を行う場合に、
前記d軸電流指令値を正の値に設定すると共に前記q軸電流指令値を0に設定し、予め設定された前記回転角度の検出誤差を用いて前記電動モータに発生する発生トルクが、所定の許容トルクを超えないように、前記d軸電流指令値を設定する、
車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御方法及び車両の制御装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
電動モータを駆動力源とする車両の制御において、電動モータにd軸電流のみを流し、q軸電流を流さないことで、電動モータにトルクを発生させることなく巻線に電流を流すd軸電流制御が行われる場合がある。この制御により、バッテリの暖機やコンデンサの電荷の放電等を行うことができる。
【0003】
特許文献1には、d軸電流指令値を正の値に設定すると共に、q軸電流指令値を0に設定することで、電動モータのトルクがほぼ0となるように制御する構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2011-259570号公報
【発明の概要】
【0005】
従来技術のように、q軸電流指令値を0に設定することで電動モータのトルクを制御する場合、電動モータのロータ回転角度に検出誤差があると、検出誤差によってd軸電流値及びq軸電流値が変化し、電動モータにおいて意図しないトルクが発生する場合がある。
【0006】
本発明は、ロータの回転角度の検出誤差を見越した制御を行うことで、意図しないトルクの発生を抑制できるd軸電流制御を実現する車両の制御装置を提供することを目的とする。
【0007】
本発明のある態様は、電動モータと前記電動モータに電力を供給する電力変換装置とを備える車両の制御方法である。電動モータには、回転子の回転角度を検出する回転角度検出手段が備えられ、この制御方法は、電動モータが出力する出力トルクを、電動モータの磁石磁束、d軸インダクタンス、q軸インダクタンス及び回転角度を用いて、d軸電流指令値及びq軸電流指令値を設定することで制御し、車両の停車時において、電動モータのd軸電流のみを流す制御を行う場合に、d軸電流指令値を正の値に設定すると共にq軸電流指令値を0に設定し、予め設定された回転角度の検出誤差を用いて電動モータに発生する発生トルクが、予め設定した許容トルクを超えないように、前記d軸電流指令値を設定する。
【0008】
本発明によれば、車両の停車時に電動モータのd軸電流のみを流すd軸電流制御を行う場合に、回転角度の検出誤差により発生するトルクが許容トルクを超えないようにd軸電流指令値を設定するので、電動モータが意図しないトルクを発生することを防止できる。
【図面の簡単な説明】
【0009】
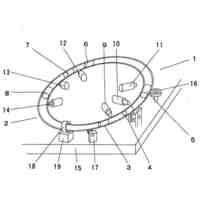
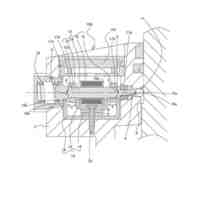
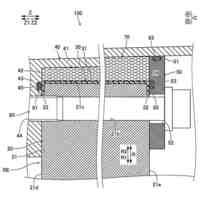
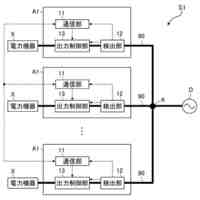
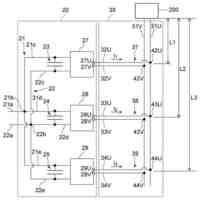
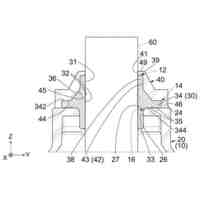
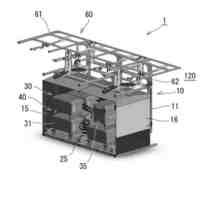
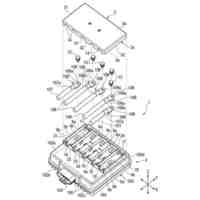
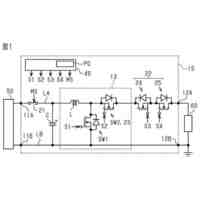
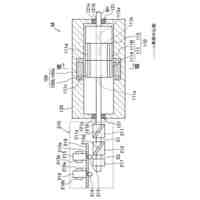
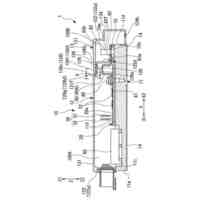
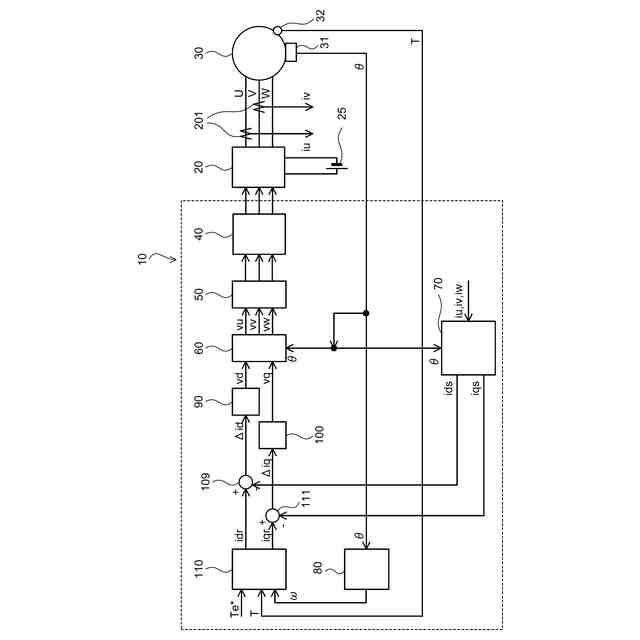
図1は、本実施形態の車両の駆動装置の説明図である。
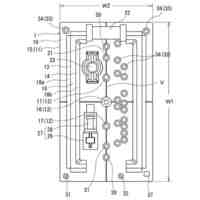
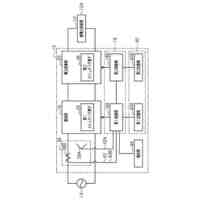
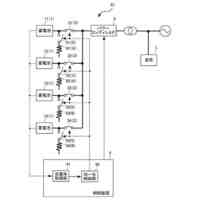
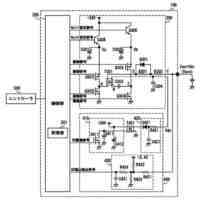
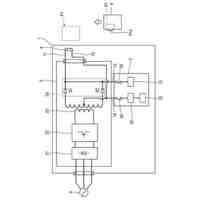
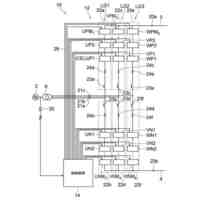
図2は、車両の制御装置の機能ブロック図である。
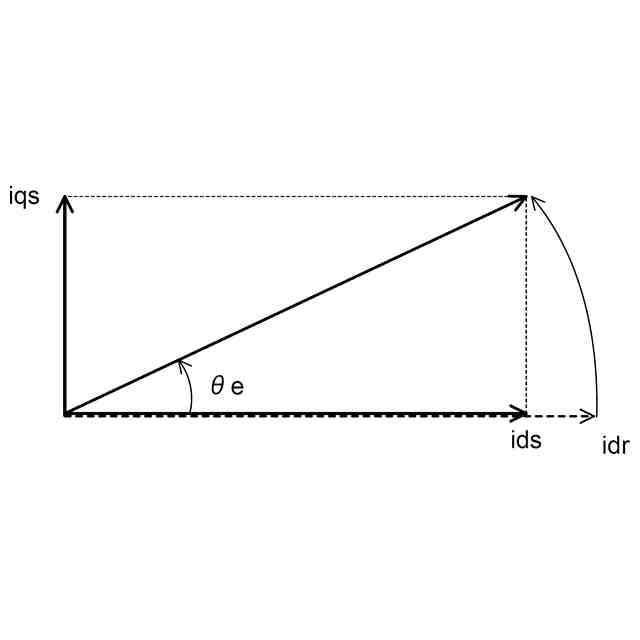
図3は、検出誤差θeにおけるd軸電流とq軸電流とを示す説明図である。
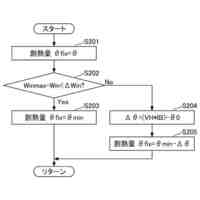
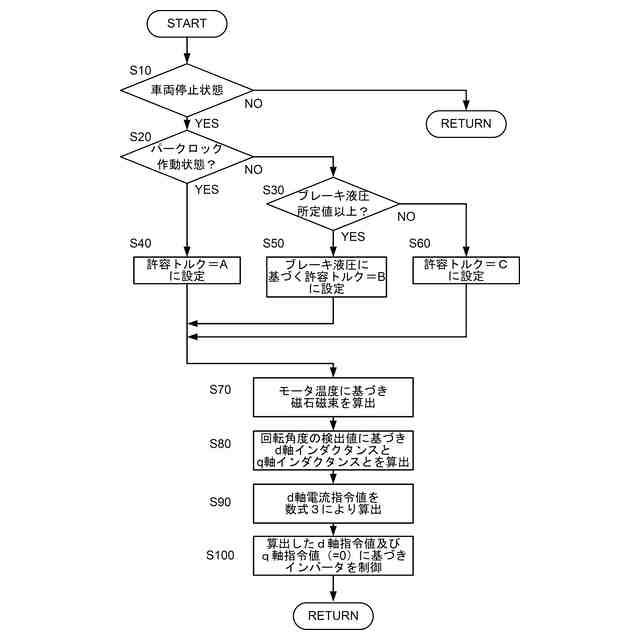
図4は、d軸電流制御の処理のフローチャートある。
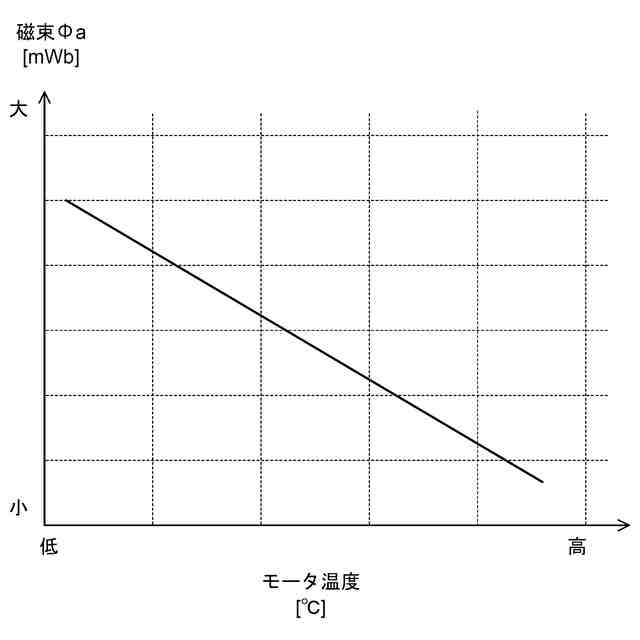
図5は、モータ温度-磁石磁束マップの一例の説明図である。
図6は、回転角度-インダクタンスマップの一例の説明図である。
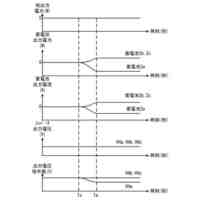
図7は、d軸電流制御のタイムチャートである。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら本発明の実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電機
2日前
個人
ファスナー式コード束ね
17日前
個人
高電荷低電位電荷搬送体
16日前
株式会社豊田自動織機
回転電機
16日前
未来工業株式会社
ゲージ
16日前
個人
回転電気装置及び発電装置
18日前
株式会社豊田自動織機
回転電機のロータ
17日前
株式会社コスメック
自立発電装置
18日前
株式会社アイシン
車両用駆動装置
10日前
富士電機株式会社
半導体装置
2日前
株式会社シマノ
電力供給装置
3日前
株式会社浅羽製作所
通線用先端誘導具
9日前
株式会社ダイヘン
電力システム
4日前
トヨタ自動車株式会社
蓄電池制御装置
4日前
高周波熱錬株式会社
電源装置
17日前
コーセル株式会社
スイッチング電源装置
16日前
株式会社ダイヘン
蓄電池システム
9日前
高周波熱錬株式会社
電源装置
17日前
日本航空電子工業株式会社
シール構造体
12日前
矢崎総業株式会社
グロメット
12日前
ニデック株式会社
ステータ、モータ及びドローン
17日前
トヨタ自動車株式会社
充電制御装置
2日前
GX株式会社
可搬式太陽光発電用電源装置
2日前
株式会社ミツバ
端子ユニット
16日前
キヤノン株式会社
電源装置、画像形成装置
3日前
株式会社ミツバ
モータ制御装置
16日前
マツダ株式会社
モータ
4日前
株式会社ミツバ
モータ制御装置
16日前
株式会社ミツバ
モータ制御装置
16日前
株式会社村田製作所
電源装置及びプログラム
18日前
シンフォニアテクノロジー株式会社
充電装置
3日前
豊田合成株式会社
太陽光発電給電装置
18日前
マツダ株式会社
モータ
4日前
株式会社ミツバ
モータ制御装置
16日前
株式会社TMEIC
電力変換装置
2日前
本田技研工業株式会社
回転電機
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ