TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025003085
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103563
出願日
2023-06-23
発明の名称
システム、制御装置、および、制御方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G08G
1/09 20060101AFI20241226BHJP(信号)
要約
【課題】遠隔制御に適した検出用画像を得られる可能性を高める技術を提供する。
【解決手段】システムは、車両であって、車両が撮影された検出用画像に含まれる予め定められた検出箇所を用いた遠隔制御によって走行する車両と、検出用画像を取得する画像取得部と、遠隔制御によって車両が走行する環境であって、検出用画像に影響を与え得る環境を表す環境情報を取得する環境情報取得部と、取得される環境情報に応じて、検出箇所として用いられる車両の部位と、検出用画像の撮影方向と、の少なくとも一方を決定する第1決定部とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
車両であって、前記車両が撮影された検出用画像に含まれる予め定められた検出箇所を用いた遠隔制御によって走行する車両と、
前記検出用画像を取得する画像取得部と、
前記遠隔制御によって前記車両が走行する環境であって、取得される前記検出用画像に影響を与え得る環境を表す環境情報を取得する環境情報取得部と、
取得される前記環境情報に応じて、前記検出箇所として用いられる前記車両の部位と、前記検出用画像の撮影方向と、の少なくとも一方を決定する第1決定部と、を備える、システム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載のシステムであって、
前記環境情報は、前記遠隔制御によって前記車両が走行するタイミングを表す情報と、前記遠隔制御によって前記車両が走行する場所を表す情報と、の少なくとも一方を含む、システム。
【請求項3】
請求項1に記載のシステムであって、
前記車両を撮影する複数のカメラと、
前記環境情報に応じて、各前記カメラのうち、決定される前記部位と前記撮影方向との前記少なくとも一方に関する条件を満たすように前記検出用画像を撮影可能な前記カメラを、前記検出用画像の撮影する担当カメラとして決定する第2決定部と、を備え、
前記画像取得部は、前記担当カメラから前記検出用画像を取得する、システム。
【請求項4】
請求項1に記載のシステムであって、
前記第1決定部は、前記検出箇所として用いられる前記部位を少なくとも決定し、
前記第1決定部は、前記環境情報に応じて、前記部位を、前記車両の左側部分または右側部分に択一的に決定する、システム。
【請求項5】
請求項4に記載のシステムであって、
前記第1決定部は、前記環境情報に応じて、前記部位を、前記車両の左後方角部または右後方角部に択一的に決定する、システム。
【請求項6】
請求項1から5のいずれか一項に記載のシステムであって、
前記検出用画像における前記検出箇所を用いて、前記遠隔制御のための制御指令の生成に用いられる前記車両の位置を推定する推定処理の内容を、決定される前記部位と前記撮影方向との前記少なくとも一方に応じて決定する第3決定部を備える、システム。
【請求項7】
請求項6に記載のシステムであって、
前記第1決定部は、前記検出箇所として用いられる前記部位を少なくとも決定し、
前記第1決定部は、前記環境情報に応じて、前記部位を、前記車両の車幅方向において互いに対称に位置する第1部分と第2部分との一方に択一的に決定し、
前記第3決定部は、
前記検出箇所として前記第2部分が用いられる場合に、前記推定処理において、前記検出用画像を鏡像反転させた反転画像を生成するとともに、前記反転画像において前記第2部分を検出する処理を実行することを決定し、
前記検出箇所として前記第1部分が用いられる場合に、前記推定処理において、鏡像反転されていない前記検出用画像において前記第1部分を検出する処理を実行することを決定する、
システム。
【請求項8】
請求項6に記載のシステムであって、
前記第3決定部は、決定される前記部位と前記撮影方向との前記少なくとも一方に応じて、前記推定処理で用いられるプログラムを決定することによって、前記推定処理の内容を決定する、システム。
【請求項9】
車両が撮影された検出用画像であって、前記検出用画像に含まれる予め定められた検出箇所が前記車両の遠隔制御に用いられる検出用画像を取得する画像取得部と、
前記遠隔制御によって前記車両が走行する環境であって、取得される前記検出用画像に影響を与え得る環境を表す環境情報を取得する環境情報取得部と、
取得される前記環境情報に応じて、前記検出箇所として用いられる前記車両の部位と、前記検出用画像の撮影方向と、の少なくとも一方を決定する第1決定部と、を備える、制御装置。
【請求項10】
車両が撮影された検出用画像であって、前記検出用画像に含まれる予め定められた検出箇所が前記車両の遠隔制御に用いられる検出用画像を取得する工程と、
前記遠隔制御によって前記車両が走行する環境であって、取得される前記検出用画像に影響を与え得る環境を表す環境情報を取得する工程と、
取得される前記環境情報に応じて、前記検出箇所として用いられる前記車両の部位と、前記検出用画像の撮影方向と、の少なくとも一方を決定する工程と、を備える、制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、システム、制御装置、および、制御方法に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
特許文献1には、車両の製造工程において、遠隔制御によって車両を走行させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
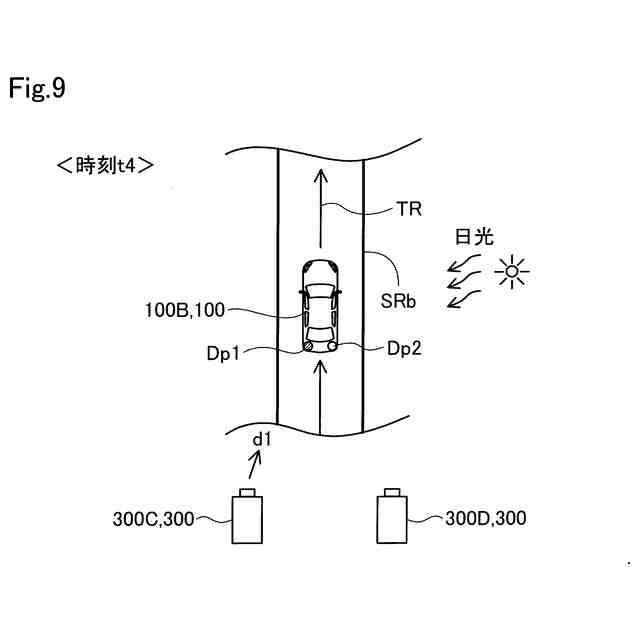
カメラによって車両を撮影した撮影画像を用いて、車両を遠隔制御する技術が知られている。しかしながら、単に車両を撮影するのみでは、例えば、車両に強い日射しが照射されている場合や、車両が旋回している場合には、遠隔制御に適した撮影画像が得られない可能性がある。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、システムが提供される。このシステムは、車両であって、前記車両が撮影された検出用画像に含まれる予め定められた検出箇所を用いた遠隔制御によって走行する、車両と、前記検出用画像を取得する画像取得部と、前記遠隔制御によって前記車両が走行する環境であって、取得される前記検出用画像に影響を与え得る環境を表す環境情報を取得する環境情報取得部と、取得される前記環境情報に応じて、前記検出箇所として用いられる前記車両の部位と、前記検出用画像の撮影方向と、の少なくとも一方を決定する第1決定部と、を備える。
このような形態であれば、遠隔制御によって車両が走行する環境に応じて、検出箇所として用いられる車両の部位や、検出用画像の撮影方向を決定できる。そのため、車両の遠隔制御に適した検出用画像を得られる可能性が高まる。
(2)上記形態では、前記環境情報は、前記遠隔制御によって前記車両が走行するタイミングを表す情報と、前記遠隔制御によって前記車両が走行する場所を表す情報と、の少なくとも一方を含んでいてもよい。このような形態であれば、遠隔制御によって車両が走行するタイミングや場所に応じて、検出箇所として用いられる車両の部位や、検出用画像の撮影方向を決定できる。
(3)上記形態では、前記車両を撮影する複数のカメラと、前記環境情報に応じて、各前記カメラのうち、決定される前記部位と前記撮影方向との前記少なくとも一方に関する条件を満たすように前記検出用画像を撮影可能な前記カメラを、前記検出用画像の撮影する担当カメラとして決定する第2決定部と、を備え、前記画像取得部は、前記担当カメラから前記検出用画像を取得してもよい。このような形態であれば、環境情報に応じて、検出用画像の撮影を担当するカメラを適切に決定できる。
(4)上記形態では、前記第1決定部は、前記検出箇所として用いられる前記部位を少なくとも決定し、前記第1決定部は、前記環境情報に応じて、前記部位を、前記車両の左側部分または右側部分に択一的に決定してもよい。このような形態であれば、環境情報に応じて、検出箇所として、車両の左側部分や右側部分を用いることができる。
(5)上記形態では、前記第1決定部は、前記環境情報に応じて、前記部位を、前記車両の左後方角部または右後方角部に択一的に決定してもよい。このような形態であれば、環境情報に応じて、検出箇所として、車両の左後方角部や右後方角部を用いることができる。
(6)上記形態では、前記検出用画像における前記検出箇所を用いて、前記遠隔制御のための制御指令の生成に用いられる前記車両の位置を推定する推定処理の内容を、決定される前記部位と前記撮影方向との前記少なくとも一方に応じて決定する第3決定部を備えていてもよい。このような形態であれば、検出箇所として決定される車両の部位や、決定される撮影方向に応じて、推定処理の内容を決定できる。そのため、推定処理において車両の位置をより精度良く推定できる可能性が高まる。
(7)上記形態では、前記第1決定部は、前記検出箇所として用いられる前記部位を少なくとも決定し、前記第1決定部は、前記環境情報に応じて、前記部位を、前記車両の車幅方向において互いに対称に位置する第1部分と第2部分との一方に択一的に決定し、前記第3決定部は、前記検出箇所として前記第2部分が用いられる場合に、前記推定処理において、前記検出用画像を鏡像反転させた反転画像を生成するとともに、前記反転画像において前記第2部分を検出する処理を実行することを決定し、前記検出箇所として前記第1部分が用いられる場合に、前記推定処理において、鏡像反転されていない前記検出用画像において前記第1部分を検出する処理を実行することを決定してもよい。このような形態であれば、検出箇所として第1部分を用いる場合と第2部分を用いる場合とで、検出用画像を鏡像反転させることを除いて同様の手順で、第1部分や第2部分を検出できる。
(8)上記形態では、前記第3決定部は、決定される前記部位と前記撮影方向との前記少なくとも一方に応じて、前記推定処理で用いられるプログラムを決定することによって、前記推定処理の内容を決定してもよい。このような形態であれば、第3決定部によってプログラムを決定することで、検出箇所として決定される車両の部位や、決定される撮影方向に応じて、推定処理の内容を決定できる。
【0007】
本開示は、上述したシステムとしての形態以外にも、例えば、制御装置や、制御方法や、その制御方法を実現するためのコンピュータプログラム、および、コンピュータプログラムが記録された一時的でない記録媒体などの形態で実現することができる。また、例えば、上記のシステムは、車両を遠隔制御するために、予め準備された機械学習モデルに検出用画像を入力することによって、検出用画像における検出箇所を検出してもよい。
【図面の簡単な説明】
【0008】
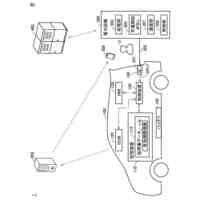
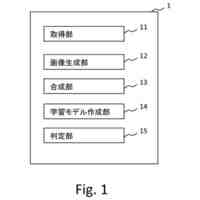
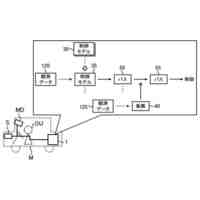
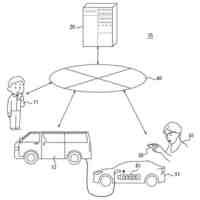
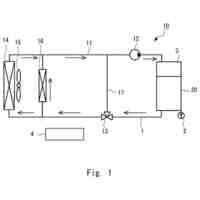
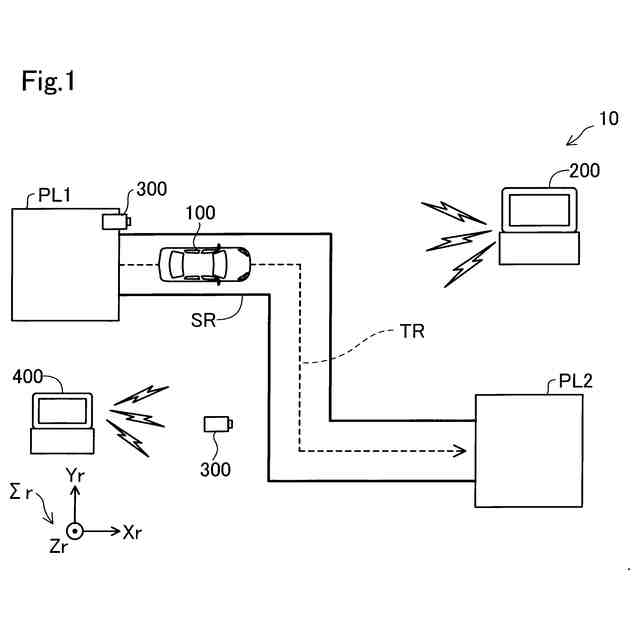
システムの構成を示す概念図である。
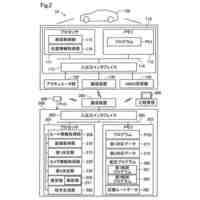
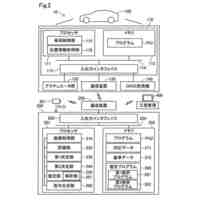
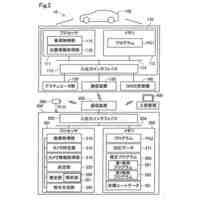
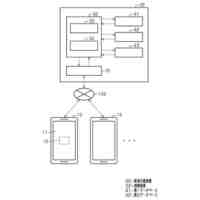
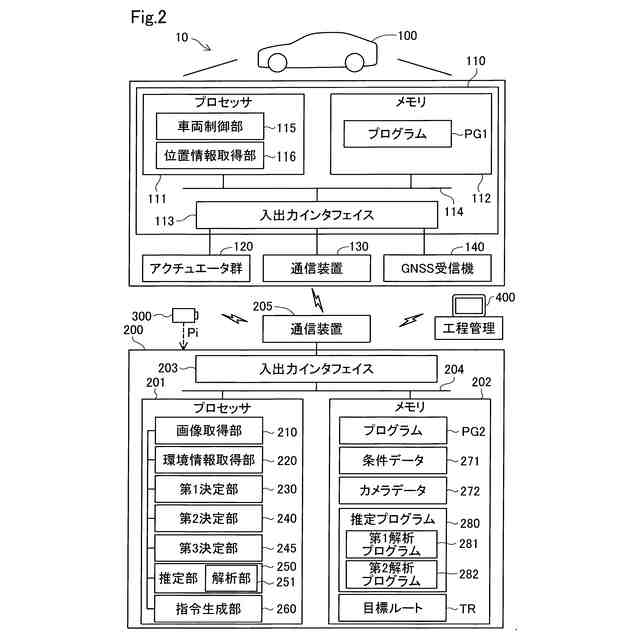
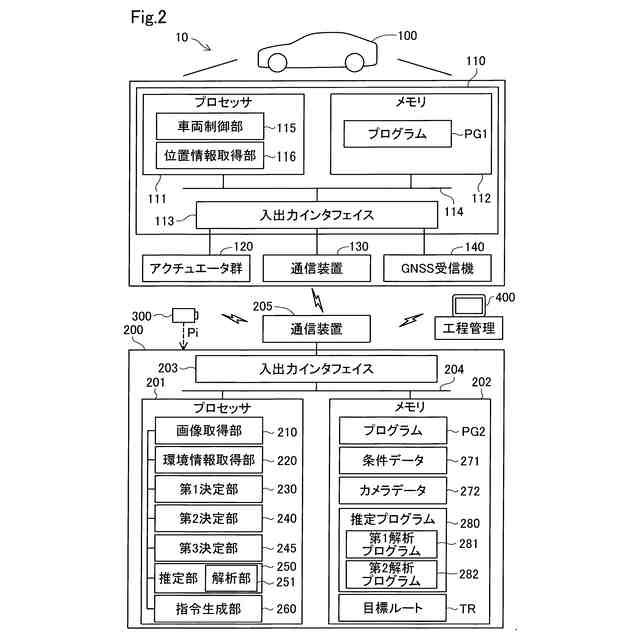
車両と制御装置との構成を示すブロック図である。
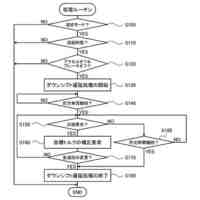
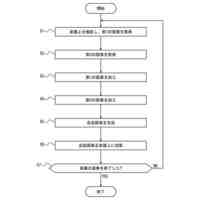
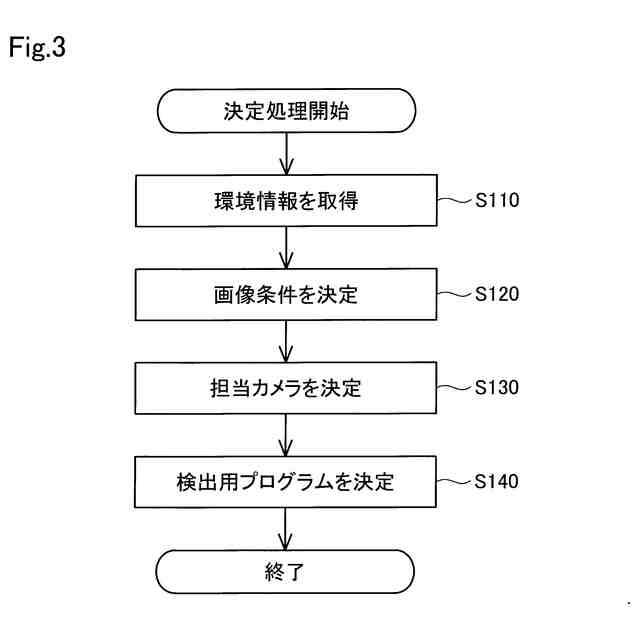
決定処理のフローチャートである。
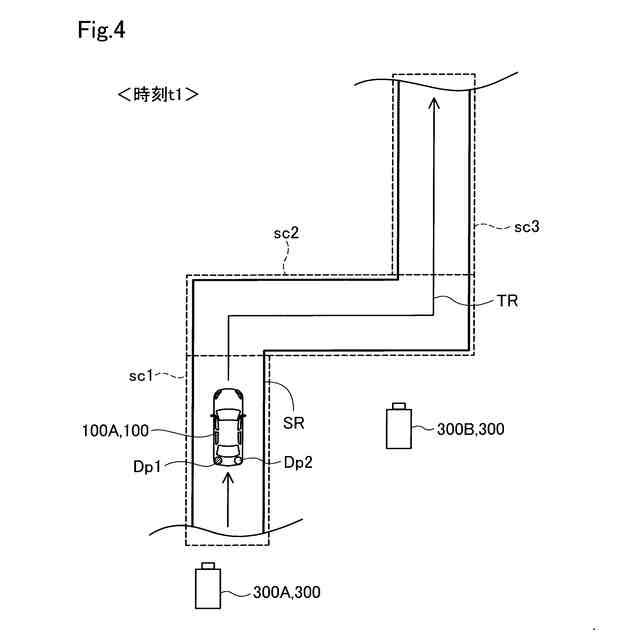
第1実施形態における決定処理を説明する第1の図である。
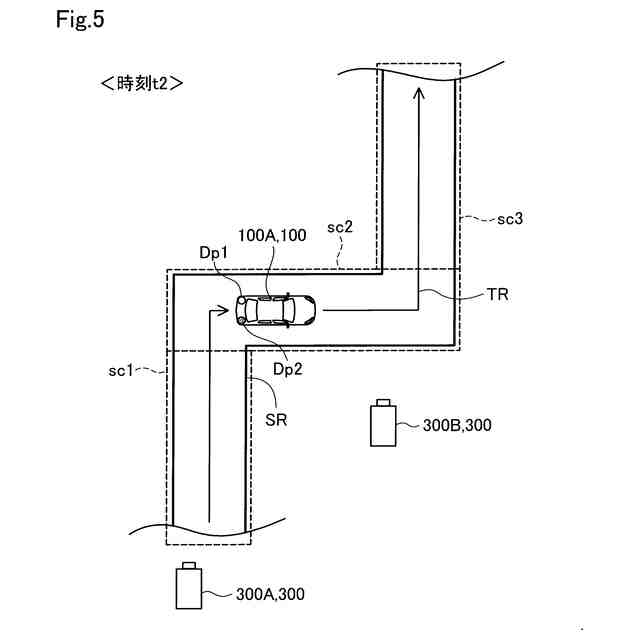
第1実施形態における決定処理を説明する第2の図である。
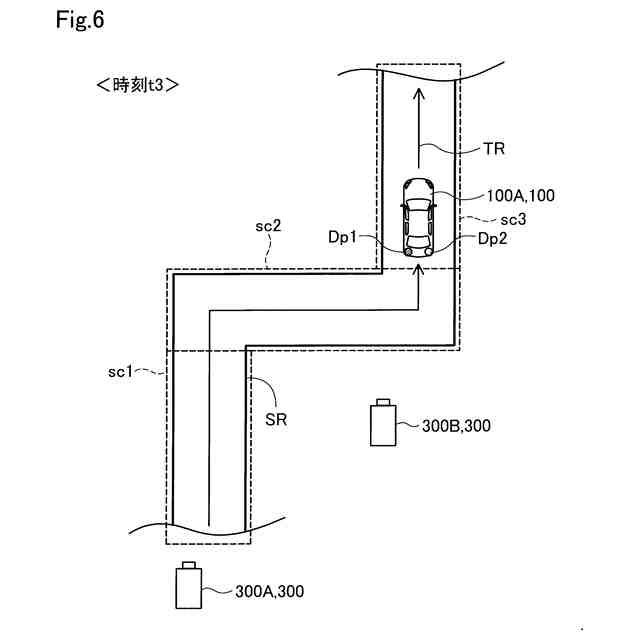
第1実施形態における決定処理を説明する第3の図である。
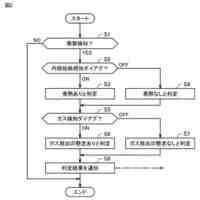
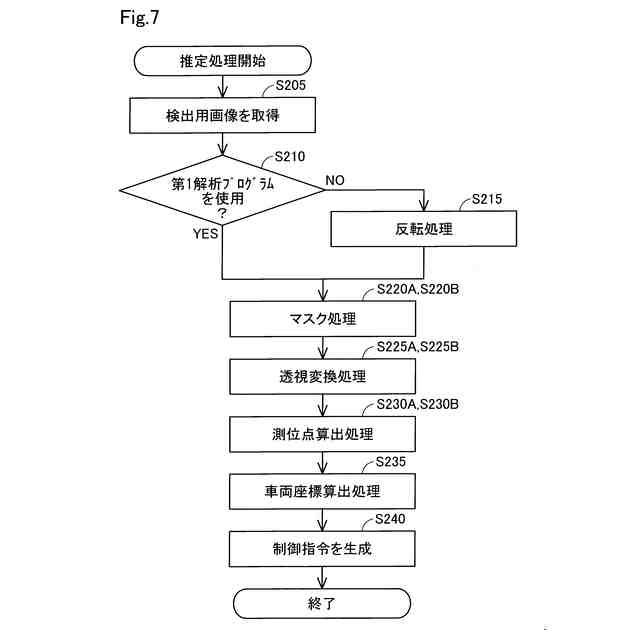
推定処理のフローチャートである。
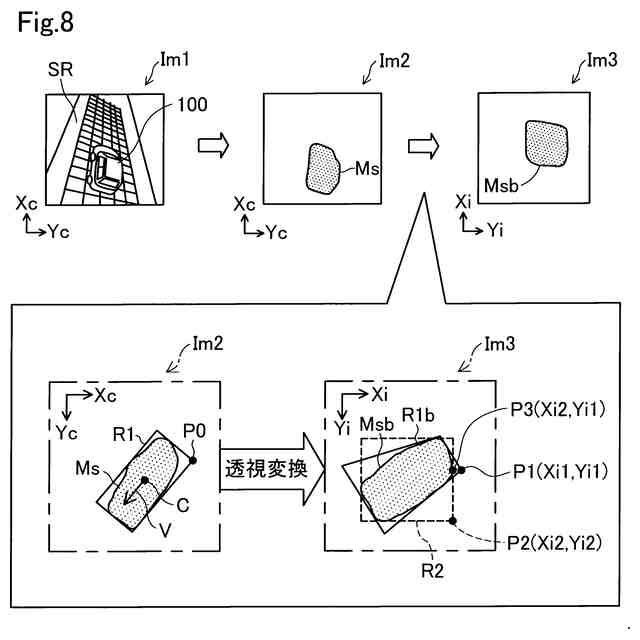
推定処理において画像が解析される様子の例を示す説明図である。
第2実施形態における決定処理を説明する第1の図である。
第2実施形態における決定処理を説明する第2の図である。
【発明を実施するための形態】
【0009】
A.第1実施形態:
図1は、第1実施形態におけるシステム10の構成を示す概念図である。図2は、車両100と制御装置200との構成を示すブロック図である。システム10は、車両100を遠隔制御により走行させる遠隔制御システムとして構成されている。システム10は、1台以上の車両100と、車両100の遠隔制御を実行する制御装置200と、車両100が撮影された撮影画像Piを撮影する複数のカメラ300と、車両100の製造工程の管理を行う工程管理装置400とを備える。
【0010】
本実施形態における車両100は、電気自動車(BEV:Battery Electric Vehicle)である。なお、車両100は、電気自動車に限られず、例えば、ガソリン自動車や、ハイブリッド自動車や、燃料電池自動車でもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
方法
15日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
金型装置
1日前
トヨタ自動車株式会社
駆動装置
2日前
トヨタ自動車株式会社
解析装置
15日前
トヨタ自動車株式会社
積層コア
2日前
トヨタ自動車株式会社
電力機器
3日前
トヨタ自動車株式会社
制御方法
1日前
トヨタ自動車株式会社
内燃機関
15日前
トヨタ自動車株式会社
供給装置
15日前
トヨタ自動車株式会社
駆動装置
15日前
トヨタ自動車株式会社
駆動装置
15日前
トヨタ自動車株式会社
二次電池
1日前
トヨタ自動車株式会社
蓄電セル
15日前
トヨタ自動車株式会社
車載隔壁
1日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
蓄電セル
15日前
トヨタ自動車株式会社
制御装置
15日前
トヨタ自動車株式会社
内燃機関
15日前
トヨタ自動車株式会社
システム
1日前
トヨタ自動車株式会社
システム
1日前
トヨタ自動車株式会社
システム
1日前
トヨタ自動車株式会社
端子台装置
15日前
トヨタ自動車株式会社
電池冷却器
16日前
トヨタ自動車株式会社
サーバ装置
2日前
トヨタ自動車株式会社
電池パック
16日前
トヨタ自動車株式会社
リンク機構
3日前
トヨタ自動車株式会社
車両用架台
3日前
トヨタ自動車株式会社
画像提供装置
2日前
トヨタ自動車株式会社
情報処理装置
15日前
トヨタ自動車株式会社
電池温調装置
15日前
トヨタ自動車株式会社
配達支援装置
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ