TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002936
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103336
出願日
2023-06-23
発明の名称
四輪独立駆動車両の制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60L
15/20 20060101AFI20241226BHJP(車両一般)
要約
【課題】四輪独立駆動車両の旋回走行時の走行安定性の向上とエネルギ効率の向上もしくは維持とを両立させる。
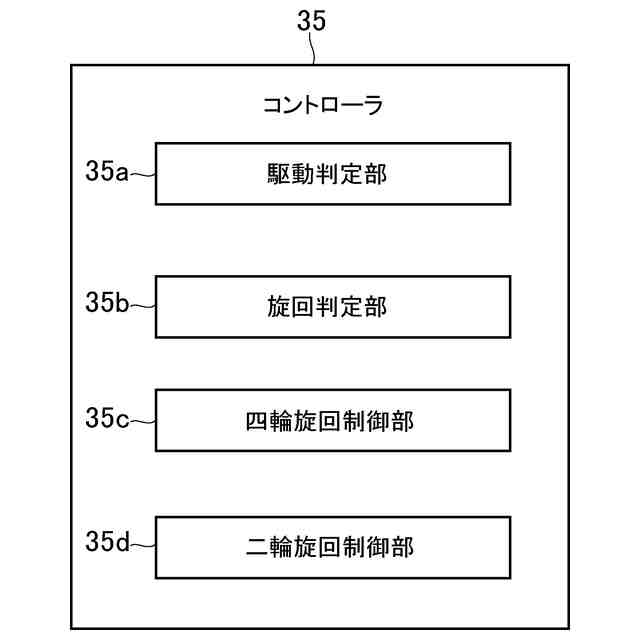
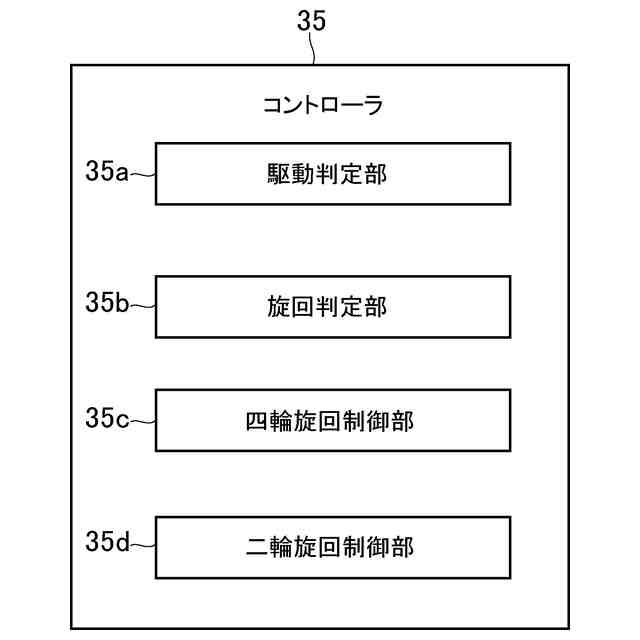
【解決手段】コントローラ35は、駆動状態が四輪駆動か二輪駆動かを判定する駆動判定部35aと、旋回走行することを判定する旋回判定部35bと、駆動判定部35aによって四輪駆動が判定され、かつ旋回判定部35bによって旋回走行が判定された場合に、四輪のそれぞれのモータを旋回走行に適する出力トルクとなるように制御する四輪旋回制御部35cと、二輪駆動が判定され、かつ旋回走行が判定された場合に、二輪駆動のために駆動される駆動輪に対応して設けられているモータを旋回走行に適する出力トルクとなるように制御するとともに、非駆動輪のブレーキ機構による制動力もしくは操舵機構による転舵角を旋回走行に適するように制御する二輪旋回制御部35dとを備えている。
【選択図】図6
特許請求の範囲
【請求項1】
前二輪および後二輪の合計四輪のそれぞれに対応して駆動力源が設けられるとともにそれらの前記駆動力源によって前記四輪のそれぞれのトルクを互いに独立して制御することにより、四輪の全てで駆動トルクを発生して走行する四輪駆動と、前後いずれか二輪で駆動トルクを発生して走行する二輪駆動とが可能であり、かつ要求されている走行状態に基づいて前記四輪駆動もしくは前記二輪駆動を選択して設定することができ、さらに少なくとも前記二輪駆動の状態で前記駆動力源によって駆動されない非駆動輪を制動するブレーキ機構もしくは転舵する操舵機構が設けられている四輪独立駆動車両の制御装置であって、
前記駆動力源と前記ブレーキ機構もしくは操舵機構とを制御するコントローラを備え、
前記コントローラは、
選択されて設定されている駆動状態が前記四輪駆動か前記二輪駆動かを判定する駆動判定部と、
前記四輪独立駆動車両が旋回走行することを判定する旋回判定部と、
前記駆動判定部によって前記四輪駆動が判定され、かつ前記旋回判定部によって前記旋回走行が判定された場合に、前記四輪のそれぞれに対応して設けられている前記駆動力源を前記旋回走行に適する出力トルクとなるように制御する四輪旋回制御部と、
前記駆動判定部によって前記二輪駆動が判定され、かつ前記旋回判定部によって前記旋回走行が判定された場合に、前記二輪駆動のために駆動される駆動輪に対応して設けられている前記駆動力源を前記旋回走行に適する出力トルクとなるように制御するとともに、前記非駆動輪の前記ブレーキ機構による制動力もしくは前記操舵機構による転舵角を前記旋回走行に適するように制御する二輪旋回制御部とを備えている
ことを特徴とする四輪独立駆動車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、四輪それぞれの駆動トルクを互いに独立して制御できる車両の制御装置に関し、特に四輪の全てを駆動する四輪駆動状態と、前後いずれか二輪を駆動する二輪駆動状態とを選択的に設定できる車両の制御装置に関するものである。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
四輪のそれぞれを互いに独立して制御できる車両が特許文献1に記載されている。特許文献1に記載された車輪独立駆動電気自動車は、四輪のそれぞれにモータを設け、それらのモータを個別に制御することにより、各車輪の駆動トルクを個別に適宜に制御できるように構成されている。この種の車両では、左右の車輪の駆動トルクに差を設け、あるいは前後の車輪の駆動トルクに差を設けることにより、車体にヨーイングが発生するので、運転者が意図する旋回経路に沿って走行するように各車輪の駆動トルクを制御して旋回性能を向上させることができる。
【先行技術文献】
【特許文献】
【0003】
特開2005-184911号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両における四輪全てのトルク(駆動トルクならびに制動トルク)を適宜に制御すれば、走行安定性や悪路の走破性を向上させることができ、さらにはエンジンブレーキ(駆動力源ブレーキ)による制動性を向上させることができる。特許文献1に記載されているような車輪独立駆動車両では、このような特性を有効に利用し、旋回走行時に四輪全てのトルクを独立して制御して旋回性あるいは走行安定性を向上させている。しかしながら、各車輪のそれぞれにおける駆動力源であるモータやそのモータから車輪にトルクを伝達する伝動機構には、摩擦や慣性力などに起因する不可避的な損失があるから、旋回走行する際に、常時、四輪全てのトルクを制御するとすれば、エネルギ損失が大きくなって、例えば電気自動車(BEV)やハイブリッド車(HEVもしくはPHEV)では電費が悪化する可能性が高くなる。
【0005】
本発明は上記の技術的課題に着目してなされたものであり、四輪独立駆動車両の旋回走行時の走行安定性の向上とエネルギ効率の向上もしくは維持とを両立させることのできる制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、本発明は、前二輪および後二輪の合計四輪のそれぞれに対応して駆動力源が設けられるとともにそれらの前記駆動力源によって前記四輪のそれぞれのトルクを互いに独立して制御することにより、四輪の全てで駆動トルクを発生して走行する四輪駆動と、前後いずれか二輪で駆動トルクを発生して走行する二輪駆動とが可能であり、かつ要求されている走行状態に基づいて前記四輪駆動もしくは前記二輪駆動を選択して設定することができ、さらに少なくとも前記二輪駆動の状態で前記駆動力源によって駆動されない非駆動輪を制動するブレーキ機構もしくは転舵する操舵機構が設けられている四輪独立駆動車両の制御装置であって、前記駆動力源と前記ブレーキ機構もしくは操舵機構とを制御するコントローラを備え、前記コントローラは、選択されて設定されている駆動状態が前記四輪駆動か前記二輪駆動かを判定する駆動判定部と、前記四輪独立駆動車両が旋回走行することを判定する旋回判定部と、前記駆動判定部によって前記四輪駆動が判定され、かつ前記旋回判定部によって前記旋回走行が判定された場合に、前記四輪のそれぞれに対応して設けられている前記駆動力源を前記旋回走行に適する出力トルクとなるように制御する四輪旋回制御部と、前記駆動判定部によって前記二輪駆動が判定され、かつ前記旋回判定部によって前記旋回走行が判定された場合に、前記二輪駆動のために駆動される駆動輪に対応して設けられている前記駆動力源を前記旋回走行に適する出力トルクとなるように制御するとともに、前記非駆動輪の前記ブレーキ機構による制動力もしくは前記操舵機構による転舵角を前記旋回走行に適するように制御する二輪旋回制御部とを備えていることを特徴とするものである。
【発明の効果】
【0007】
本発明によれば、二輪駆動で走行している状態で旋回走行が判定されると、駆動される二輪(駆動輪)のトルクが旋回走行に適するトルクに制御され、併せて非駆動輪の制動力あるいは転舵角が旋回走行に適するように制御される。その場合、駆動輪のトルク制御と非駆動輪の制動制御もしくは操舵制御とは協調して実行される。したがって、駆動すべき車輪の数もしくは駆動トルクを出力するべき動力源の数が二つに限られるので、不可避的な損失が少なくなってエネルギ効率あるいは電費が向上し、少なくともエネルギ効率あるいは電費の悪化を回避もしくは抑制でき、あるいは維持できる。また、その場合、非駆動輪はブレーキ機構あるいは操舵機構によって、そのトルクあるいは転舵角が旋回走行に適するように制御されるので、旋回性が維持され、あるいは悪化することが抑制もしくは回避される。また一方、四輪駆動で走行している状態で旋回走行が判定されると、四輪のそれぞれのトルクが旋回走行に適したトルクとなるよう、車輪ごとの駆動力源が制御される。したがってこの場合は、四輪の全てで車両を旋回させることになるので、旋回時の走行安定性が良好になる。なおこの場合、ブレーキ機構や操舵機構は旋回走行のためには特には機能(動作)させない。したがって、本発明によれば、旋回走行時の走行安定性の向上とエネルギ効率の向上もしくは維持とを両立させることができる。
【図面の簡単な説明】
【0008】
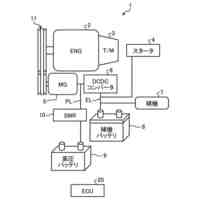
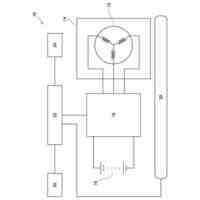
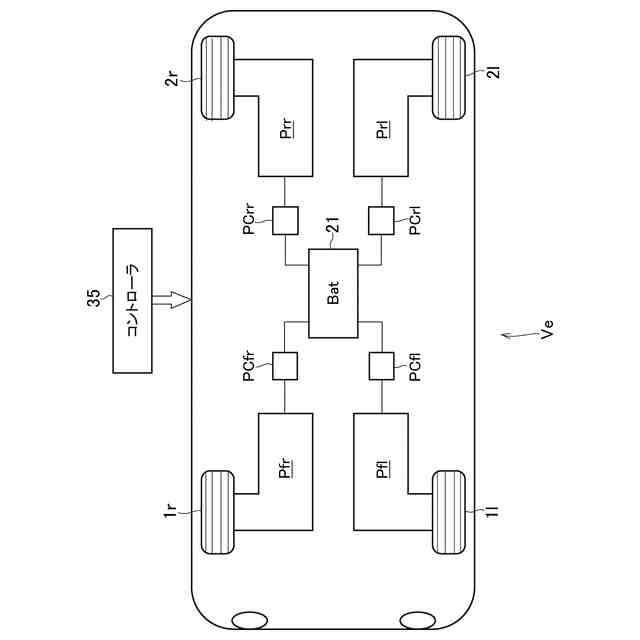
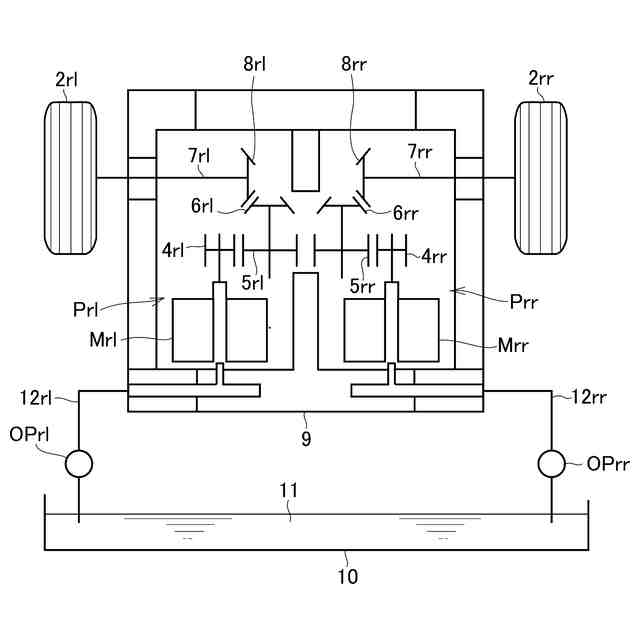
本発明の実施形態における四輪独立駆動車両の駆動系統を模式的に示すブロック図である。
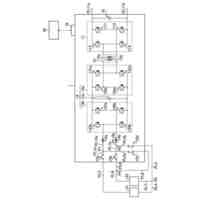
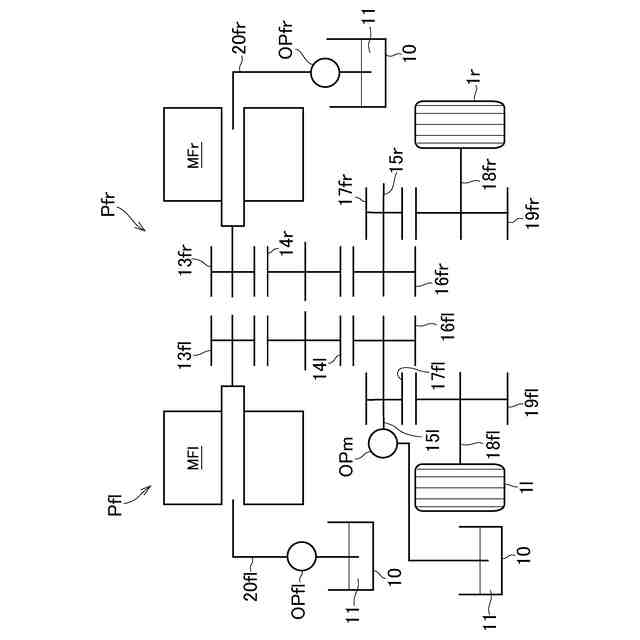
後輪側の駆動ユニットの一例を示すスケルトン図である。
前輪側の駆動ユニットの一例を示すスケルトン図である。
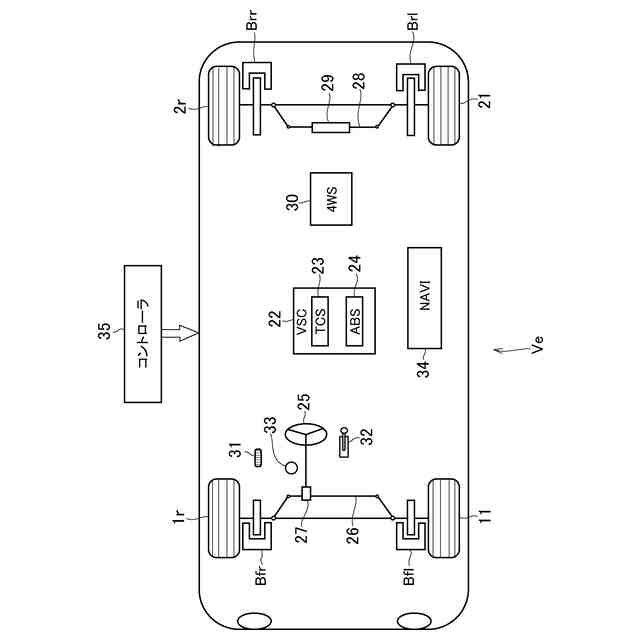
車両の走行ならびに停止および旋回のための各種の機構を説明するための模式図である。
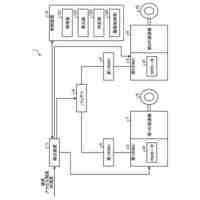
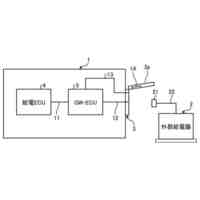
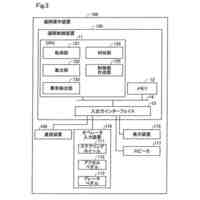
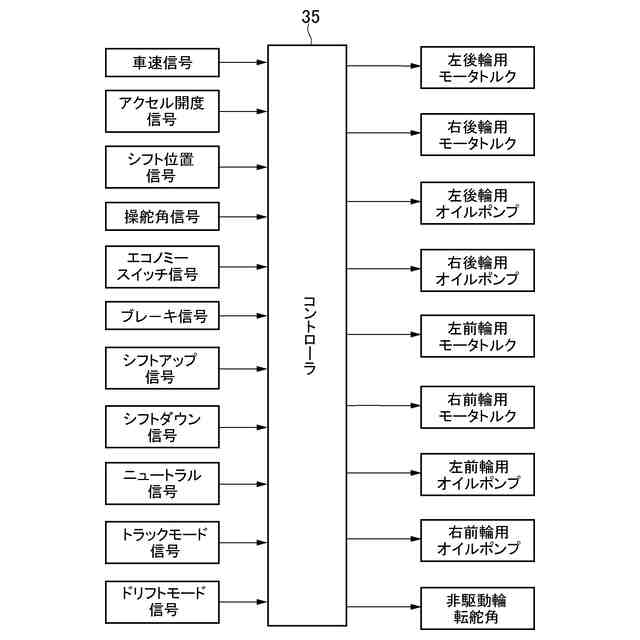
コントローラの入出力信号を例示するブロック図である。
コントローラの機能的構成を示すブロック図である。
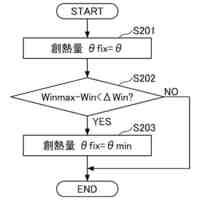
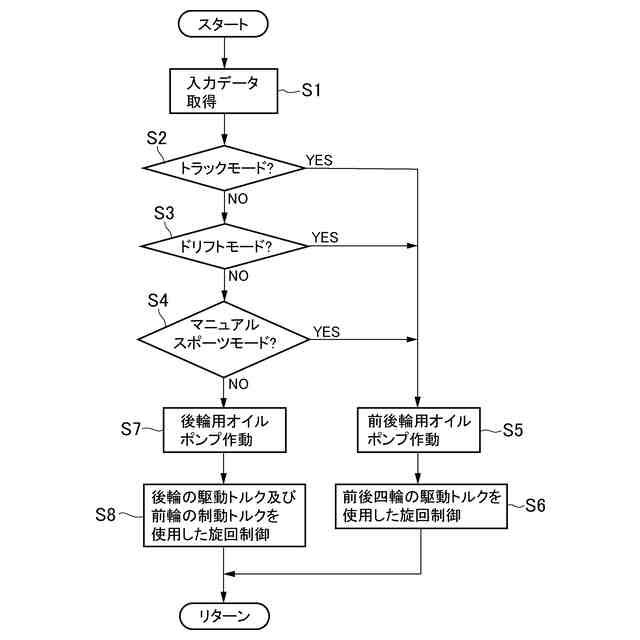
本発明の実施形態で実行される制御の一例を説明するためのフローチャートである。
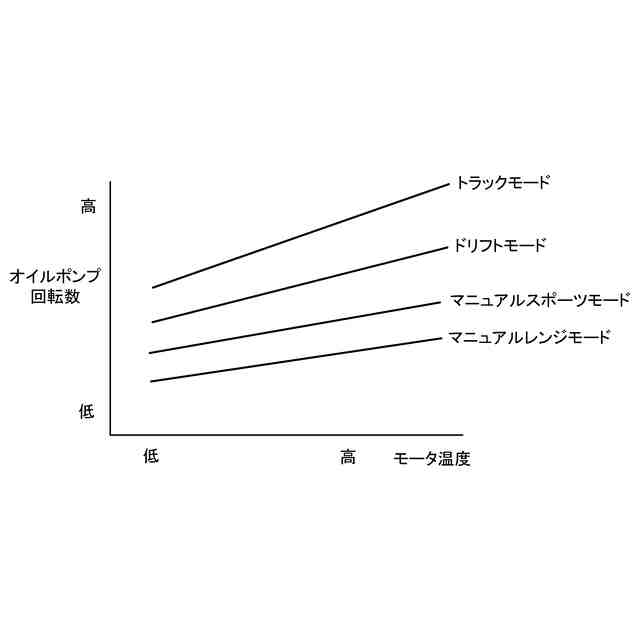
走行モードごとのオイルポンプの回転数を決めてあるマップの一例を示す線図である。
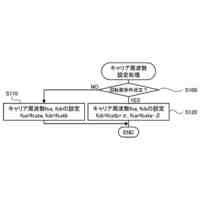
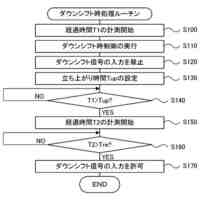
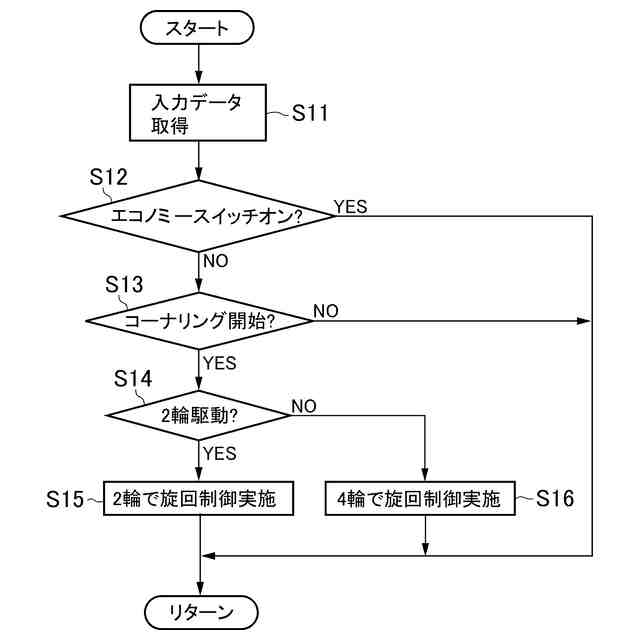
旋回走行(コーナリング)開始時の駆動状態に基づいて旋回走行中の駆動状態を決める制御例を説明するためのフローチャートである。
Dレンジで使用する要求駆動トルクマップを模式的に示す線図である。
DレンジないしLレンジでアクセル開度が50%の要求駆動トルクマップを模式的に示す線図である。
【発明を実施するための形態】
【0009】
つぎに、本発明の実施形態を添付の図面を参照して説明する。なお、以下に説明する実施形態は本発明を実施した場合の一例に過ぎないのであって、本発明を限定するものではない。
【0010】
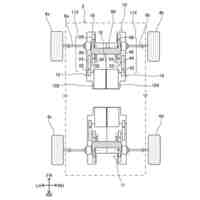
本発明で対象とする車両は、前二輪および後二輪の合計四輪の車両であって、四輪全てを互いに独立して駆動できるように、それぞれの車輪に対応させて駆動力源を設けた四輪独立駆動車両である。その例を図1に模式的に示してある。ここに示す車両Veは、左右の前輪1r,1lと左右の後輪2r,2lとを備え、これらの車輪1r,1l,2r,2lのそれぞれに対応して駆動力源としての駆動ユニットPfr,Pfl,Prr,Prlが設けられている。これらの駆動ユニットPfr,Pfl,Prr,Prlは、それぞれ、モータおよび歯車減速機構(伝動機構)を主体として構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
正極層
17日前
トヨタ自動車株式会社
充電器
3日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
飛行体
17日前
トヨタ自動車株式会社
ロータ
9日前
トヨタ自動車株式会社
電動車
17日前
トヨタ自動車株式会社
自動車
2日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
蓄電セル
18日前
トヨタ自動車株式会社
駆動装置
9日前
トヨタ自動車株式会社
蓄電装置
18日前
トヨタ自動車株式会社
蓄電セル
18日前
トヨタ自動車株式会社
製造方法
3日前
トヨタ自動車株式会社
電動車両
9日前
トヨタ自動車株式会社
駆動装置
18日前
トヨタ自動車株式会社
駆動装置
9日前
トヨタ自動車株式会社
電動車両
3日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
二次電池
18日前
トヨタ自動車株式会社
二次電池
9日前
トヨタ自動車株式会社
判定装置
4日前
トヨタ自動車株式会社
二次電池
9日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
内燃機関
18日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
蓄電セル
10日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
制御装置
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ