TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025001982
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023101822
出願日
2023-06-21
発明の名称
情報処理方法、情報処理装置、情報処理プログラム、記憶媒体
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20241226BHJP(制御;調整)
要約
【課題】周辺物との干渉可能性を事前に確認可能な情報処理方法等を提供する。
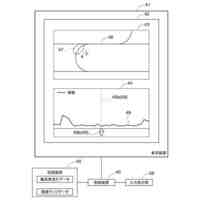
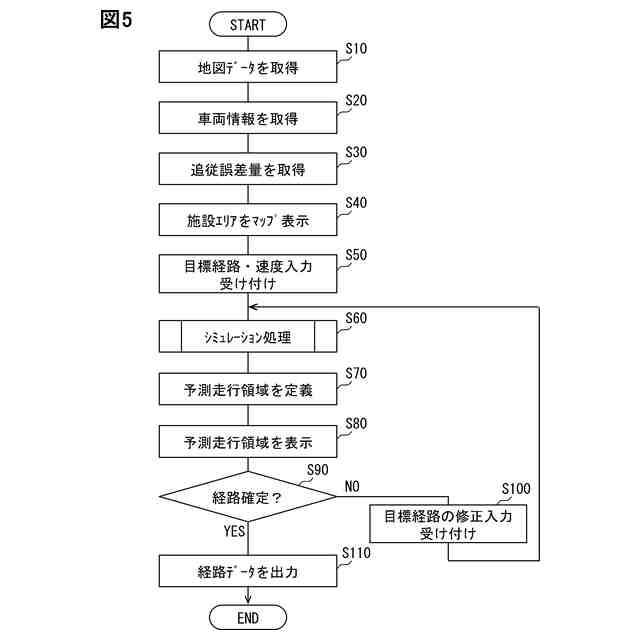
【解決手段】情報処理方法は、自律牽引装置の通過点としてのノード間ごとに目標とする目標経路の入力を受け付けることを含む。情報処理方法は、自律牽引装置の通過が予測される予測走行領域を、目標経路と紐づけて表示することを含む。予測走行領域は、ノード間ごとに入力された目標経路をトレースするトラクタの目標経路に対するトレース誤差と、トラクタに牽引されるトレーラのトレース誤差と、に相関する領域である。
【選択図】図5
特許請求の範囲
【請求項1】
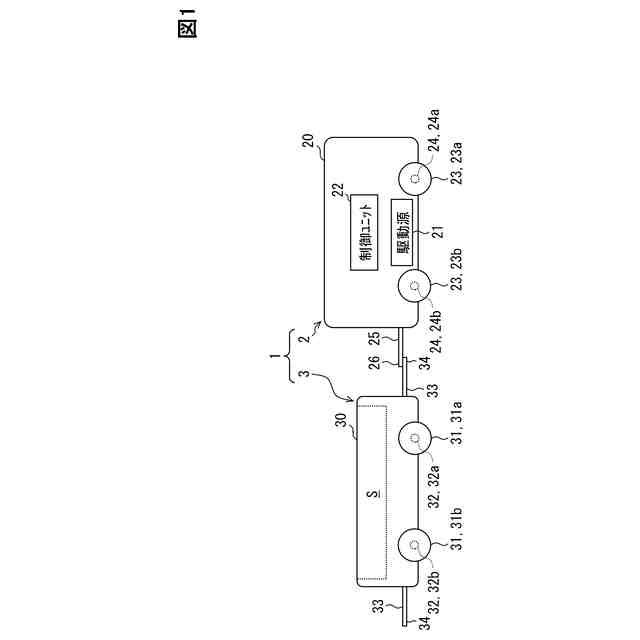
トレーラ(3)をトラクタ(2)の自律走行により牽引する自律牽引装置(1)がトレースする目標経路(P)に関連した表示を制御するために、プロセッサ(102)により実行される情報処理方法であって、
前記自律牽引装置の通過点としてのノード間ごとに目標とする前記目標経路の入力を受け付けることと、
前記ノード間ごとに入力された前記目標経路をトレースする前記トラクタの前記目標経路に対するトレース誤差と、前記トラクタに牽引される前記トレーラの前記トレース誤差と、に相関する予測走行領域(R)として、前記自律牽引装置の通過が予測される領域を、前記目標経路と紐づけて表示することと、
を含む情報処理方法。
続きを表示(約 1,600 文字)
【請求項2】
前記目標経路の入力を受け付けることは、
前記ノード間ごとに目標とする目標速度の入力を受け付けることを含み、
前記予測走行領域は、
前記目標速度での前記目標経路の通過に対する前記トレーラの前記トレース誤差に相関する請求項1に記載の情報処理方法。
【請求項3】
前記目標経路の入力を受け付けることは、
前記自律牽引装置を識別する識別情報の入力を受け付けることを含み、
前記予測走行領域は、
前記目標経路に対する前記トレース誤差として、前記識別情報により識別される前記自律牽引装置における前記トレーラに予測される前記トレース誤差に、相関する請求項1に記載の情報処理方法。
【請求項4】
前記予測走行領域を前記目標経路と紐づけて表示することは、
前記目標経路の入力に応じて、入力された前記目標経路に対する前記予測走行領域をシミュレートして表示することを、含む請求項1に記載の情報処理方法。
【請求項5】
前記予測走行領域を前記目標経路と紐づけて表示することは、
前記目標経路に想定される複数種類の仮想経路に対してシミュレートされた前記予測走行領域に関する領域情報が記憶されたデータベースから、入力された前記目標経路とマッチする前記仮想経路に対応する前記領域情報を読み出すことと、
読み出した前記領域情報に応じて前記予測走行領域を表示することと、
を含む請求項1に記載の情報処理方法。
【請求項6】
前記目標経路の入力を受け付けることは、
前記予測走行領域と紐づけて表示された前記目標経路の修正入力を受け付けることを、さらに含む請求項1に記載の情報処理方法。
【請求項7】
前記予測走行領域を前記目標経路と紐づけて表示することは、
前記目標経路を定義した経路データを生成することを含む請求項1に記載の情報処理方法。
【請求項8】
前記予測走行領域を前記目標経路と紐づけて表示することは、
生成した前記経路データを出力することを含む請求項7に記載の情報処理方法。
【請求項9】
プロセッサ(102)を備え、トレーラ(3)をトラクタ(2)の自律走行により牽引する自律牽引装置(1)がトレースする目標経路(P)に関連した表示を制御する情報処理装置であって、
前記プロセッサは、
前記自律牽引装置の通過点としてのノード間ごとに目標とする前記目標経路の入力を受け付けることと、
前記ノード間ごとに入力された前記目標経路をトレースする前記トラクタの前記目標経路に対するトレース誤差と、前記トラクタに牽引される前記トレーラの前記トレース誤差と、に相関する予測走行領域(R)として、前記自律牽引装置の通過が予測される領域を、前記目標経路と紐づけて表示することと、
を実行するように構成される情報処理装置。
【請求項10】
トレーラ(3)をトラクタ(2)の自律走行により牽引する自律牽引装置(1)がトレースする目標経路(P)に関連した表示を制御するために記憶媒体(101)に記憶され、プロセッサ(102)に実行させる命令を含む情報処理プログラムであって、
前記命令は、
前記自律牽引装置の通過点としてのノードの間ごとに目標とする前記目標経路の入力を受け付けさせることと、
前記ノード間ごとに入力された前記目標経路をトレースする前記トラクタの前記目標経路に対するトレース誤差と、前記トラクタに牽引される前記トレーラの前記トレース誤差と、に相関する予測走行領域(R)として、前記自律牽引装置の通過が予測される領域を、前記目標経路と紐づけて表示させることと、
を含む情報処理プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律牽引装置のトレースする目標経路を定義する経路データの表示を制御する情報処理技術に、関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1には、台車を牽引する牽引車の走行経路を探索する経路探索システムが開示されている。この経路探索システムは、現在位置から目的地までの複数の走行経路と、各走行経路に対する経路コストと、を設定する。経路探索システムは、牽引走行時に台車が障害物と干渉することなく走行可能な牽引時走行経路部と、牽引車の単独走行時の単独走行経路部と、が走行経路に含まれる場合、各経路部に対して牽引走行時及び単独走行時の経路コストをそれぞれ設定する。経路探索システムは、牽引車の走行状態に応じて牽引時走行経路部及び単独走行経路部の経路コストを用いて、最小コストの走行経路を探索する。
【先行技術文献】
【特許文献】
【0003】
特開2022-114188号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
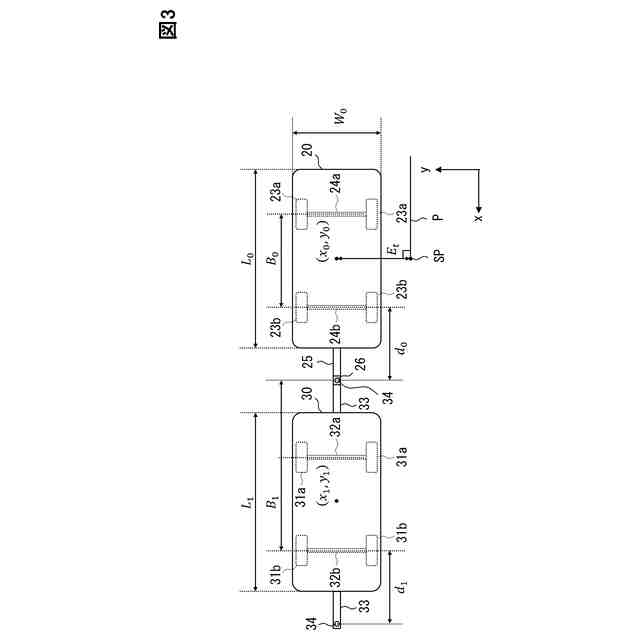
特許文献1の技術では、現在位置からの経路を探索するため、探索直後の走行位置における目標経路に対する追従遅延が大きくなる虞がある。そして、経路探索の開始位置が事前の規定された位置であったとしても、牽引車を目標経路に追従させると、目標経路に対する牽引車の追従誤差が生じることで、非牽引側の台車にも、牽引車との内輪差により、目標経路に対してさらなる追従誤差が生じる虞がある。特許文献1の技術では、以上の追従遅延及び追従誤差が考慮されていないため、目標経路を走行する際の周辺物との干渉可能性を事前に確認することが不可能となり得る。
【0005】
本開示の課題は、周辺物との干渉可能性を事前に確認可能な情報処理方法を、提供することにある。本開示の別の課題は、周辺物との干渉可能性を事前に確認可能な情報処理装置を、提供することにある。本開示の又別の課題は、周辺物との干渉可能性を事前に確認可能な情報処理プログラムを、提供することにある。本開示のさらに別の課題は、周辺物との干渉可能性を事前に確認可能な記憶媒体を、提供することにある。
【課題を解決するための手段】
【0006】
以下、課題を解決するための本開示の技術的手段について、説明する。尚、特許請求の範囲及び本欄に記載された括弧内の符号は、後に詳述する実施形態に記載された具体的手段との対応関係を示すものであり、本開示の技術的範囲を限定するものではない。
【0007】
本開示の第一態様は、トレーラ(3)をトラクタ(2)の自律走行により牽引する自律牽引装置(1)がトレースする目標経路(P)に関連した表示を制御するために、プロセッサ(102)により実行される情報処理方法であって、
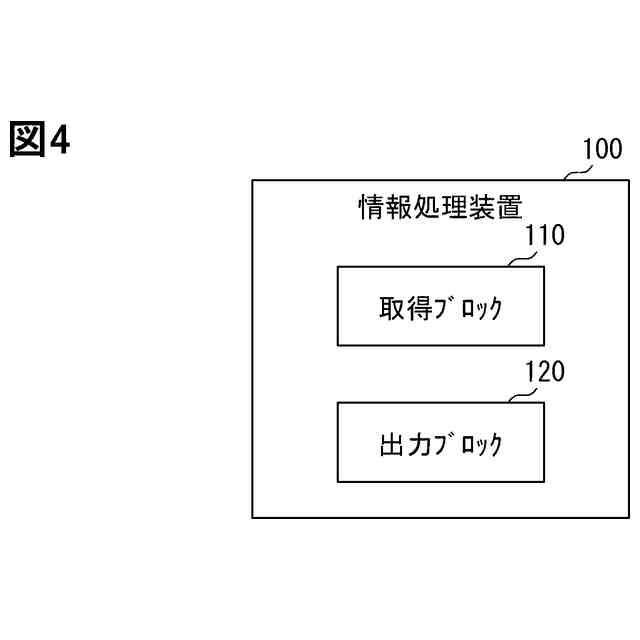
自律牽引装置の通過点としてのノード間ごとに目標とする目標経路の入力を受け付けることと、
ノード間ごとに入力された目標経路をトレースするトラクタの目標経路に対するトレース誤差と、トラクタに牽引されるトレーラのトレース誤差と、に相関する予測走行領域(R)として、自律牽引装置の通過が予測される領域を、目標経路と紐づけて表示することと、
を含む。
【0008】
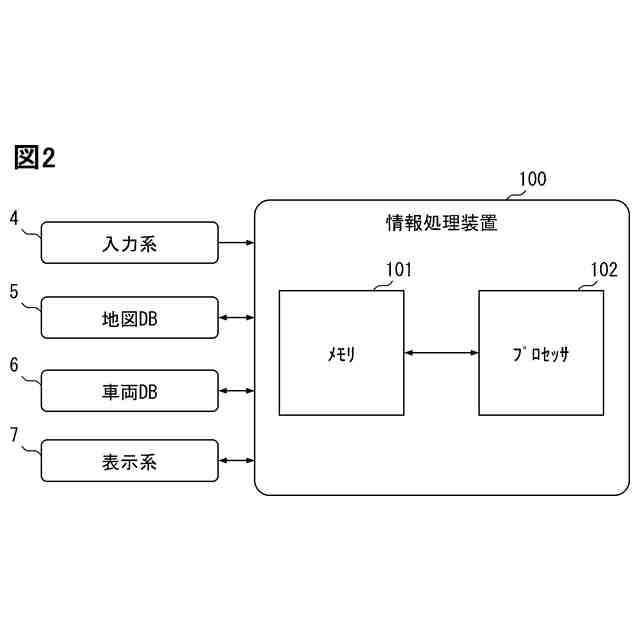
本開示の第二態様は、プロセッサ(102)を備え、トレーラ(3)をトラクタ(2)の自律走行により牽引する自律牽引装置(1)がトレースする目標経路(P)に関連した表示を制御する情報処理装置であって、
プロセッサは、
自律牽引装置の通過点としてのノード間ごとに目標とする目標経路の入力を受け付けることと、
ノード間ごとに入力された目標経路をトレースするトラクタの目標経路に対するトレース誤差と、トラクタに牽引されるトレーラのトレース誤差と、に相関する予測走行領域(R)として、自律牽引装置の通過が予測される領域を、目標経路と紐づけて表示することと、
を実行するように構成される。
【0009】
本開示の第三態様は、トレーラ(3)をトラクタ(2)の自律走行により牽引する自律牽引装置(1)がトレースする目標経路(P)に関連した表示を制御するために記憶媒体(101)に記憶され、プロセッサ(102)に実行させる命令を含む情報処理プログラムであって、
命令は、
自律牽引装置の通過点としてのノードの間ごとに目標とする目標経路の入力を受け付けさせることと、
ノード間ごとに入力された目標経路をトレースするトラクタの目標経路に対するトレース誤差と、トラクタに牽引されるトレーラのトレース誤差と、に相関する予測走行領域(R)として、自律牽引装置の通過が予測される領域を、目標経路と紐づけて表示させることと、
を含む。
【0010】
本開示の第四態様は、トレーラ(3)をトラクタ(2)の自律走行により牽引する自律牽引装置(1)がトレースする目標経路(P)に関連した表示を制御するためにプロセッサ(102)に実行させる命令を含む情報処理プログラムを記憶した記憶媒体であって、
命令は、
自律牽引装置の通過点としてのノードの間ごとに目標とする目標経路の入力を受け付けさせることと、
ノード間ごとに入力された目標経路をトレースするトラクタの目標経路に対するトレース誤差と、トラクタに牽引されるトレーラのトレース誤差と、に相関する予測走行領域(R)として、自律牽引装置の通過が予測される領域を、目標経路と紐づけて表示させることと、
を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
1か月前
ugo株式会社
移動体
1か月前
神港テクノス株式会社
制御装置
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
自律移動体
1か月前
トヨタ自動車株式会社
搬送ロボット
2か月前
トヨタ自動車株式会社
配送システム
29日前
株式会社フジキン
流体制御装置
1か月前
アズビル株式会社
パラメータ調整装置
2日前
トヨタ自動車株式会社
自律移動システム
1か月前
トヨタ自動車株式会社
ロボットシステム
1日前
トヨタ自動車株式会社
位置推定システム
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社栗本鐵工所
操作装置
2か月前
株式会社FUJI
工作機械の操作システム
1か月前
キヤノン株式会社
情報処理装置
1日前
株式会社ダイフク
物品搬送設備
1か月前
ローム株式会社
電源回路
24日前
ローム株式会社
電源回路
29日前
CKD日機電装株式会社
モデルフリーポジカスト制御
2か月前
トヨタ自動車株式会社
群制御システム及び方法
1か月前
村田機械株式会社
搬送車システム
1か月前
東フロコーポレーション株式会社
流量制御装置
22日前
株式会社ダイフク
情報表示システム
22日前
株式会社日立製作所
移動体制御システム
29日前
ローム株式会社
リニア電源
1か月前
ローム株式会社
リニア電源
1か月前
ローム株式会社
放電回路および電源システム
1か月前
株式会社ディスコ
搬送車
1日前
株式会社デンソー
ペダル装置
2か月前
ローム株式会社
定電圧生成回路
1か月前
花王株式会社
物品の製造方法
1か月前
株式会社日立製作所
診断装置および診断方法
17日前
アルプスアルパイン株式会社
回転操作装置
1か月前
日本製鉄株式会社
処理装置、処理方法、およびプログラム
29日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ