TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025001338
公報種別
公開特許公報(A)
公開日
2025-01-08
出願番号
2023100857
出願日
2023-06-20
発明の名称
復帰処理を選択するための装置、方法、および、プログラム
出願人
横河電機株式会社
代理人
弁理士法人RYUKA国際特許事務所
主分類
G05B
23/02 20060101AFI20241225BHJP(制御;調整)
要約
【課題】復帰処理を選択するための装置、方法、および、プログラムを提供する。
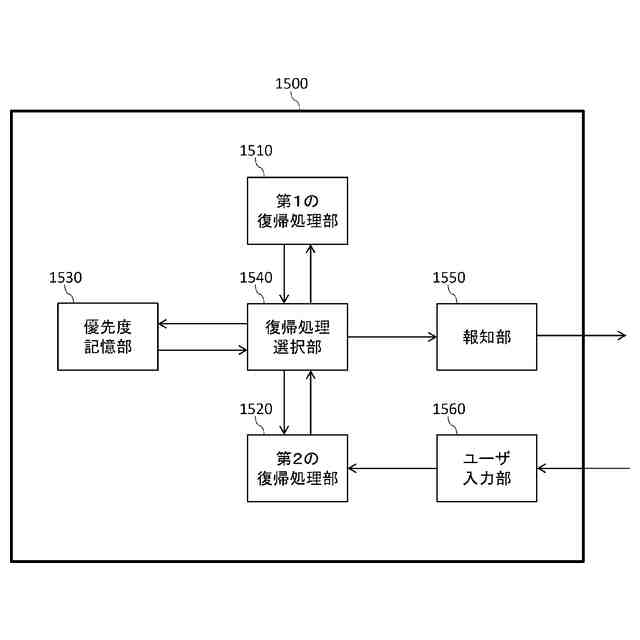
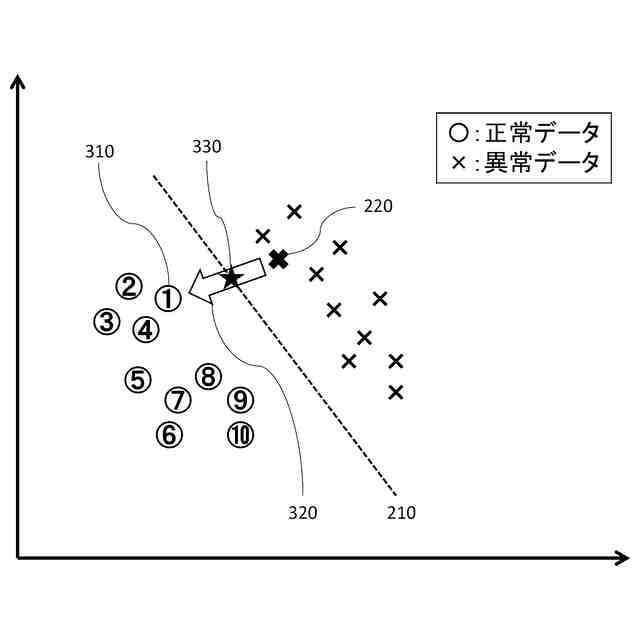
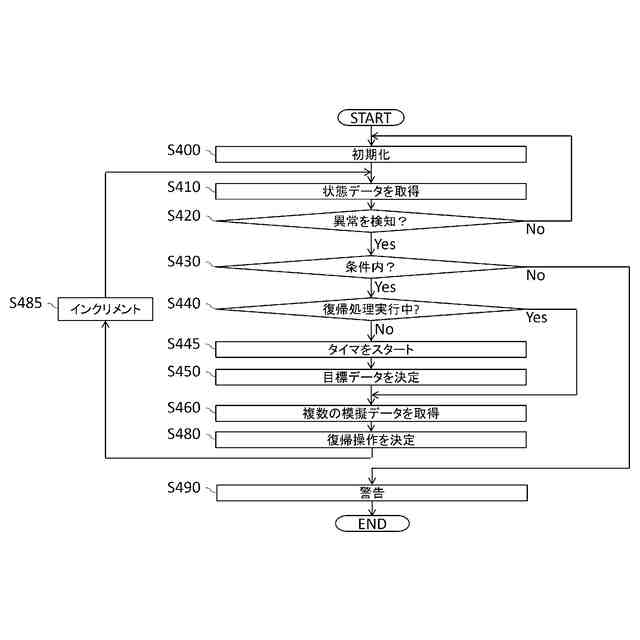
【解決手段】シミュレータを用いたシミュレーション結果に基づいて、設備を異常から正常に復帰させるための復帰操作を決定する第1の復帰処理を実行する第1の復帰処理部と、実機を用いた試行操作により、前記復帰操作を探索する第2の復帰処理を実行する第2の復帰処理部と、前記設備に異常が生じた場合に、予め定められたルールにしたがって、前記第1の復帰処理および前記第2の復帰処理のうち実行する復帰処理を選択する復帰処理選択部と、を備える、装置を提供する。
【選択図】図15
特許請求の範囲
【請求項1】
シミュレータを用いたシミュレーション結果に基づいて、設備を異常から正常に復帰させるための復帰操作を決定する第1の復帰処理を実行する第1の復帰処理部と、
実機を用いた試行操作により、前記復帰操作を探索する第2の復帰処理を実行する第2の復帰処理部と、
前記設備に異常が生じた場合に、予め定められたルールにしたがって、前記第1の復帰処理および前記第2の復帰処理のうち実行する復帰処理を選択する復帰処理選択部と、
を備える、装置。
続きを表示(約 1,000 文字)
【請求項2】
前記復帰処理選択部は、前記第1の復帰処理および前記第2の復帰処理のうちの一方の復帰処理を選択中に予め定められた条件内において前記設備が異常から正常に復帰しない場合に、前記第1の復帰処理および前記第2の復帰処理のうちの他方の復帰処理を選択する、請求項1に記載の装置。
【請求項3】
前記復帰処理選択部は、前記一方の復帰処理を選択中に制御対象が制御された回数が予め定められた閾値を超える場合に、前記他方の復帰処理を選択する、請求項2に記載の装置。
【請求項4】
前記復帰処理選択部は、前記一方の復帰処理を選択中に経過時間が予め定められた閾値を超える場合に、前記他方の復帰処理を選択する、請求項2に記載の装置。
【請求項5】
前記第1の復帰処理を優先するための第1の優先度および前記第2の復帰処理を優先するための第2の優先度を記憶する優先度記憶部を更に備え、
前記復帰処理選択部は、前記第1の優先度および前記第2の優先度にしたがって実行する復帰処理を選択する、請求項1に記載の装置。
【請求項6】
前記復帰処理選択部は、前記第1の復帰処理を選択中に前記設備が異常から正常に復帰した場合に前記第1の優先度を上げ、前記第2の復帰処理を選択中に前記設備が異常から正常に復帰した場合に前記第2の優先度を上げる、請求項5に記載の装置。
【請求項7】
前記復帰処理選択部は、前記第1の復帰処理を選択中に前記設備が異常から正常に復帰しない場合に前記第1の優先度を下げ、前記第2の復帰処理を選択中に前記設備が異常から正常に復帰しない場合に前記第2の優先度を下げる、請求項5に記載の装置。
【請求項8】
前記復帰処理選択部は、少なくとも一部の期間に亘って前記第1の復帰処理および前記第2の復帰処理の両者を選択する、請求項1に記載の装置。
【請求項9】
前記第2の復帰処理部は、前記第1の復帰処理におけるシミュレーションの実行中に、前記第2の復帰処理を実行する、請求項8に記載の装置。
【請求項10】
前記第1の復帰処理および前記第2の復帰処理のいずれによっても前記設備が異常から正常に復帰しない場合に、前記設備を自動復帰できない旨を報知する報知部を更に備える、請求項1から9のいずれか一項に記載の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、復帰処理を選択するための装置、方法、および、プログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、「プラントの異常要因を特定できるとともに、異常状態からの復帰操作をオペレータの介在なしに自動的に行えるプラント運転装置を得る。」と記載されている。
[先行技術文献]
[特許文献]
[特許文献1] 特開2014-229109号
【発明の概要】
【0003】
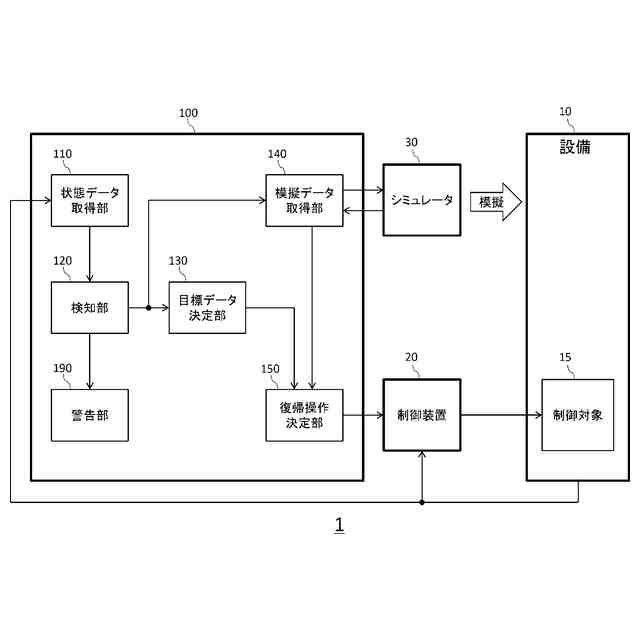
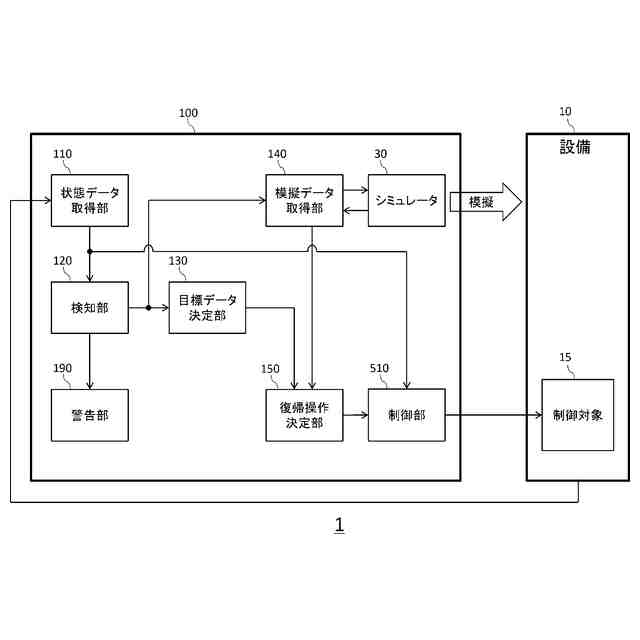
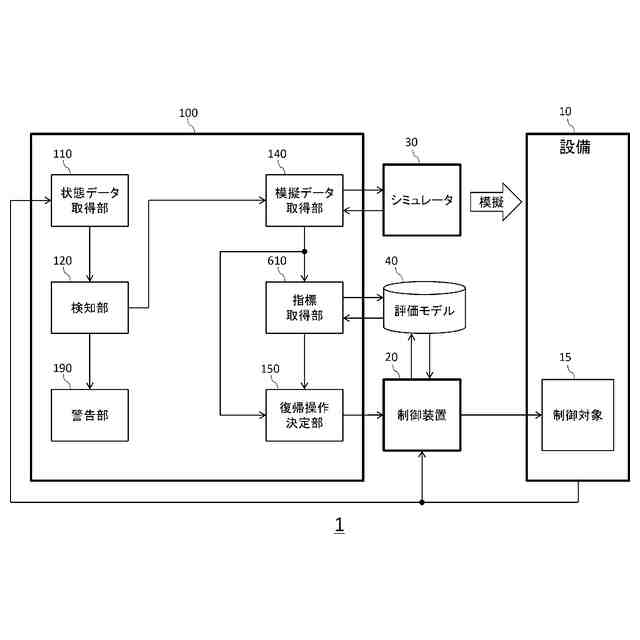
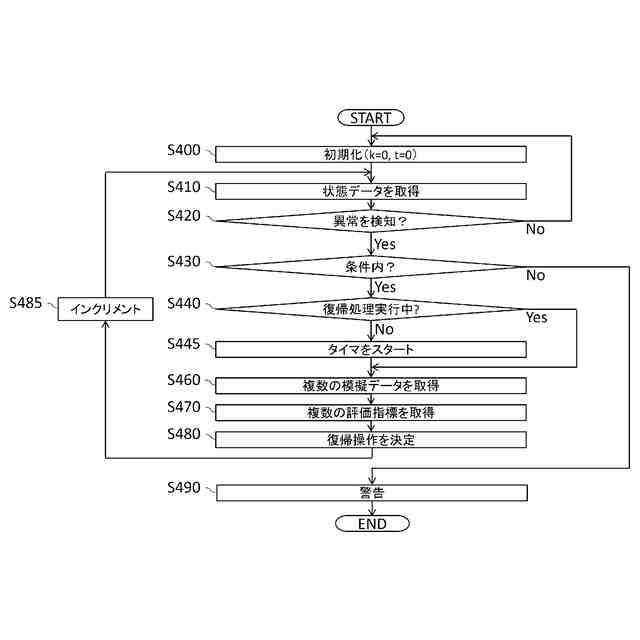
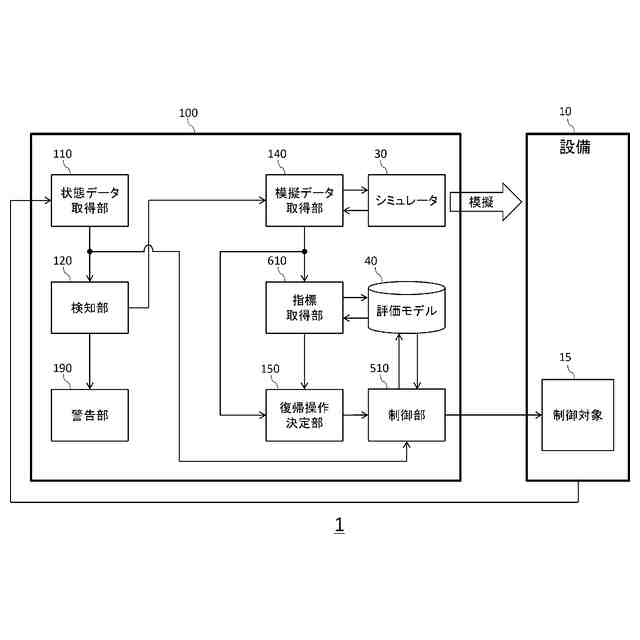
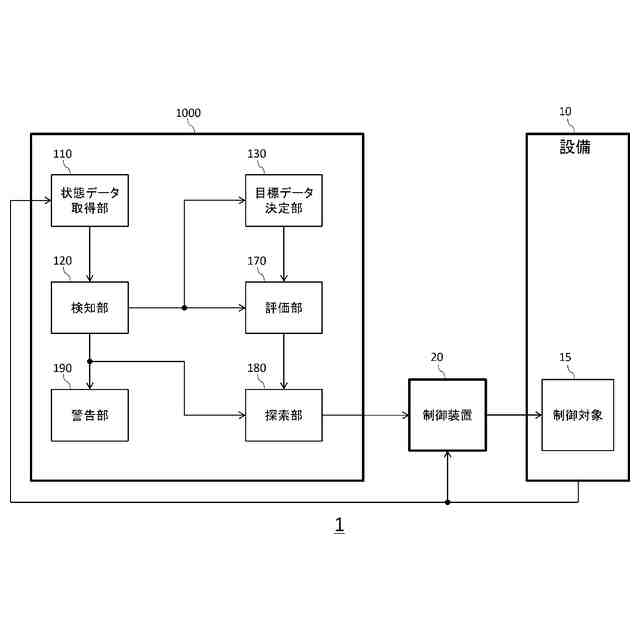
本発明の第1の態様においては、復帰処理の実行を制御するための装置を提供する。前記装置は、シミュレータを用いたシミュレーション結果に基づいて、設備を異常から正常に復帰させるための復帰操作を決定する第1の復帰処理を実行する第1の復帰処理部と、実機を用いた試行操作により、前記復帰操作を探索する第2の復帰処理を実行する第2の復帰処理部と、前記設備に異常が生じた場合に、予め定められたルールにしたがって、前記第1の復帰処理および前記第2の復帰処理のうち実行する復帰処理を選択する復帰処理選択部と、を備える。
【0004】
前記装置において、前記復帰処理選択部は、前記第1の復帰処理および前記第2の復帰処理のうちの一方の復帰処理を選択中に予め定められた条件内において前記設備が異常から正常に復帰しない場合に、前記第1の復帰処理および前記第2の復帰処理のうちの他方の復帰処理を選択してもよい。
【0005】
前記装置のいずれかにおいて、前記復帰処理選択部は、前記一方の復帰処理を選択中に制御対象が制御された回数が予め定められた閾値を超える場合に、前記他方の復帰処理を選択してもよい。
【0006】
前記装置のいずれかにおいて、前記復帰処理選択部は、前記一方の復帰処理を選択中に経過時間が予め定められた閾値を超える場合に、前記他方の復帰処理を選択してもよい。
【0007】
前記装置のいずれかは、前記第1の復帰処理を優先するための第1の優先度および前記第2の復帰処理を優先するための第2の優先度を記憶する優先度記憶部を更に備え、前記復帰処理選択部は、前記第1の優先度および前記第2の優先度にしたがって実行する復帰処理を選択してもよい。
【0008】
前記装置のいずれかにおいて、前記復帰処理選択部は、前記第1の復帰処理を選択中に前記設備が異常から正常に復帰した場合に前記第1の優先度を上げ、前記第2の復帰処理を選択中に前記設備が異常から正常に復帰した場合に前記第2の優先度を上げてもよい。
【0009】
前記装置のいずれかにおいて、前記復帰処理選択部は、前記第1の復帰処理を選択中に前記設備が異常から正常に復帰しない場合に前記第1の優先度を下げ、前記第2の復帰処理を選択中に前記設備が異常から正常に復帰しない場合に前記第2の優先度を下げてもよい。
【0010】
前記装置のいずれかにおいて、前記復帰処理選択部は、少なくとも一部の期間に亘って前記第1の復帰処理および前記第2の復帰処理の両者を選択してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
横河電機株式会社
流路装置
1日前
横河電機株式会社
電磁流量計
16日前
横河電機株式会社
コリオリ質量流量計
16日前
横河電機株式会社
制御装置、制御方法、及びプログラム
3日前
横河電機株式会社
情報処理装置、情報処理方法、及びプログラム
3日前
横河電機株式会社
情報提供装置、情報提供方法及び情報提供プログラム
1日前
横河電機株式会社
光ファイバ特性測定装置及び光ファイバ特性測定方法
1日前
横河電機株式会社
情報提供装置、情報提供方法及び情報提供プログラム
22日前
横河電機株式会社
図面解析装置、図面解析方法、および図面解析プログラム
3日前
横河電機株式会社
情報管理装置、情報管理方法、および情報管理プログラム
1日前
横河電機株式会社
復帰処理を選択するための装置、方法、および、プログラム
2日前
横河電機株式会社
測定装置、測定装置の起動方法、及び測定装置の起動プログラム
17日前
横河電機株式会社
情報処理装置、情報処理システム、情報処理方法、プログラム、及び測定器
1日前
横河電機株式会社
生育状態推定装置、植物管理システム、生育状態推定方法、及びプログラム
22日前
横河電機株式会社
マルチセル型電解槽の状態を監視する方法、装置、及びコンピュータプログラム
24日前
横河電機株式会社
マルチセル型電解槽の測定温度を決定する方法、装置、コンピュータプログラム、及びシステム
24日前
横河電機株式会社
プラント図面ライン検出システム、プラント図面ライン検出方法、およびプラント図面ライン検出プログラム
3日前
横河電機株式会社
プラント図面シンボル検出システム、プラント図面シンボル検出方法、およびプラント図面シンボル検出プログラム
3日前
トヨタ自動車株式会社
配送システム
29日前
アズビル株式会社
パラメータ調整装置
2日前
トヨタ自動車株式会社
ロボットシステム
1日前
キヤノン株式会社
情報処理装置
1日前
ローム株式会社
電源回路
24日前
ローム株式会社
電源回路
29日前
東フロコーポレーション株式会社
流量制御装置
22日前
株式会社ダイフク
情報表示システム
22日前
株式会社日立製作所
移動体制御システム
29日前
株式会社ディスコ
搬送車
1日前
花王株式会社
物品の製造方法
1か月前
株式会社日立製作所
診断装置および診断方法
17日前
株式会社リコー
移動体、プログラム、位置推定方法
2日前
トヨタ自動車株式会社
制御装置
29日前
トヨタ自動車株式会社
制御装置
29日前
日本製鉄株式会社
処理装置、処理方法、およびプログラム
29日前
トヨタ自動車株式会社
制御装置
29日前
株式会社CAOS
エレベータ内ロボット乗降システム
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ