TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025001089
公報種別
公開特許公報(A)
公開日
2025-01-08
出願番号
2023100478
出願日
2023-06-20
発明の名称
電動作業機及びモータアセンブリの製造方法
出願人
株式会社マキタ
代理人
弁理士法人酒井国際特許事務所
主分類
H02K
5/10 20060101AFI20241225BHJP(電力の発電,変換,配電)
要約
【課題】モータケースに対してモータを適正に位置決めすること。
【解決手段】電動作業機は、ステータコアとインシュレータとコイルとを含むステータと、ステータに対して回転軸を中心に回転するロータと、ロータに固定されるロータシャフトと、を有するモータと、ロータシャフトにより駆動される出力部と、軸方向一方側に挿入口を有する本体部と、挿入口を塞ぐように本体部に接続される蓋部と、を有し、ステータ及びロータが収容されるモータケースと、モータの少なくとも一部を覆うようにモータケースに収容される樹脂部と、を備える。本体部は、軸方向一方側のステータの少なくとも一部を支持する支持面を有する。
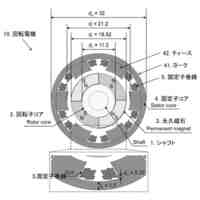
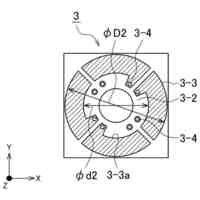
【選択図】図3
特許請求の範囲
【請求項1】
ステータコアとインシュレータとコイルとを含むステータと、前記ステータに対して回転軸を中心に回転するロータと、前記ロータに固定されるロータシャフトと、を有するモータと、
前記ロータシャフトにより駆動される出力部と、
軸方向一方側に挿入口を有する本体部と、前記挿入口を塞ぐように前記本体部に接続される蓋部と、を有し、前記ステータ及び前記ロータが収容されるモータケースと、
前記モータの少なくとも一部を覆うように前記モータケースに収容される樹脂部と、を備え、
前記本体部は、軸方向一方側の前記ステータの少なくとも一部を支持する支持面を有する、
電動作業機。
続きを表示(約 1,100 文字)
【請求項2】
前記インシュレータは、軸方向一方側の前記ステータコアの端面から径方向外側に突出する突出部を有し、
前記支持面は、前記突出部を支持する、
請求項1に記載の電動作業機。
【請求項3】
前記本体部は、前記ステータを囲むように配置される筒部を有し、
前記筒部の内周面は、小径部と、前記小径部よりも軸方向一方側に配置される大径部と、を含み、
前記支持面は、前記小径部と前記大径部との境界に設けられる、
請求項2に記載の電動作業機。
【請求項4】
前記支持面は、前記回転軸に平行な軸と直交する、
請求項3に記載の電動作業機。
【請求項5】
前記支持面は、前記回転軸を囲む円環状である、
請求項4に記載の電動作業機。
【請求項6】
前記ステータは、前記ステータコアよりも軸方向一方側において前記インシュレータに固定されるバスバーユニットを含む、
請求項1に記載の電動作業機。
【請求項7】
前記ステータコアは、ヨークと、前記ヨークから径方向内側に突出するティースと、を有し、
前記コイルは、前記ティースのコイル支持面の周囲に配置され、
前記インシュレータは、前記コイル支持面の全部を覆うように設けられる、
請求項1に記載の電動作業機。
【請求項8】
前記インシュレータは、軸方向一方側の前記ステータコアの一部を覆う第1インシュレータと、軸方向他方側の前記ステータコアの一部を覆う第2インシュレータと、を含み、
前記樹脂部は、前記第1インシュレータと前記第2インシュレータとの間の前記ステータコアの表面に接触する、
請求項1に記載の電動作業機。
【請求項9】
前記ステータコアは、ヨークと、前記ヨークから径方向内側に突出するティースと、を有し、
前記コイルは、前記ティースのコイル支持面の周囲に配置され、
前記第1インシュレータは、前記軸方向一方側の前記ティースのコイル支持面の一部を覆うように設けられ、
前記第2インシュレータは、前記軸方向他方側の前記ティースのコイル支持面の一部を覆うように設けられ、
前記樹脂部は、軸方向中間部の前記ティースのコイル支持面と前記コイルとの間に配置される、
請求項8に記載の電動作業機。
【請求項10】
前記樹脂部の熱伝導率は、前記インシュレータの熱伝導率よりも高い、
請求項8に記載の電動作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、電動作業機及びモータアセンブリの製造方法に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
電動作業機に係る技術分野において、特許文献1に開示されているような電動作業機が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2022-185821号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1において、電動作業機は、モータアセンブリを備える。モータアセンブリは、モータと、モータを収容するモータケースと、モータケースに収容される樹脂部(伝熱樹脂部)とを有する。モータケースに対してモータが適正に位置決めされないと、例えば外部端子と接続端子とを適正に接続することが困難となる可能性がある。
【0005】
本明細書で開示する技術は、モータケースに対してモータを適正に位置決めすることを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、電動作業機を開示する。電動作業機は、ステータコアとインシュレータとコイルとを含むステータと、ステータに対して回転軸を中心に回転するロータと、ロータに固定されるロータシャフトと、を有するモータと、ロータシャフトにより駆動される出力部と、軸方向一方側に挿入口を有する本体部と、挿入口を塞ぐように本体部に接続される蓋部と、を有し、ステータ及びロータが収容されるモータケースと、モータの少なくとも一部を覆うようにモータケースに収容される樹脂部と、を備えてもよい。本体部は、軸方向一方側のステータの少なくとも一部を支持する支持面を有してもよい。
【発明の効果】
【0007】
本明細書で開示する技術によれば、モータケースに対してモータが適正に位置決めされる。
【図面の簡単な説明】
【0008】
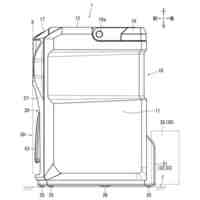
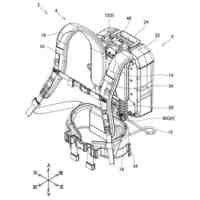
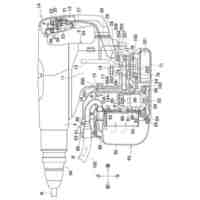
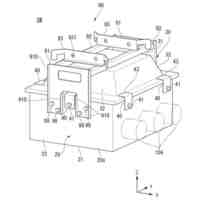
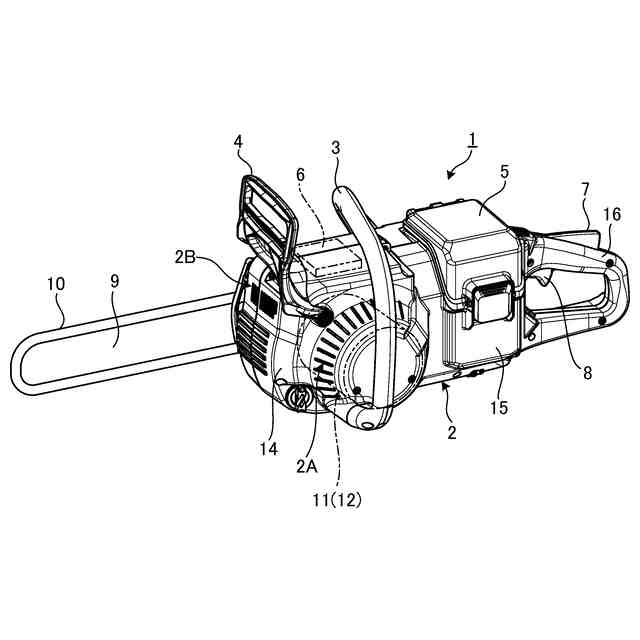
図1は、第1実施形態に係る電動作業機を示す斜視図である。
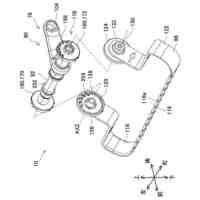
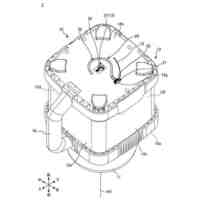
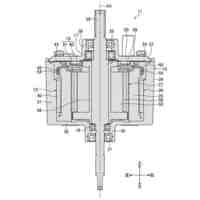
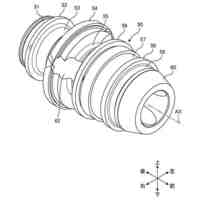
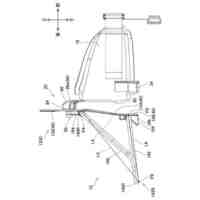
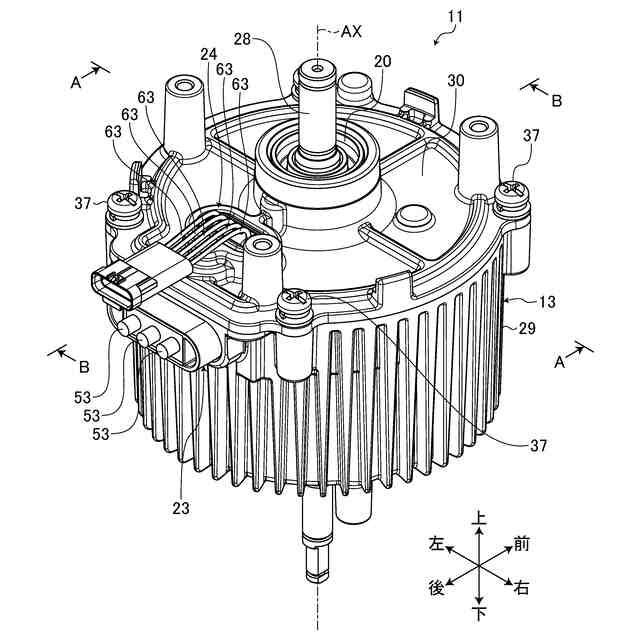
図2は、第1実施形態に係るモータアセンブリを示す斜視図である。
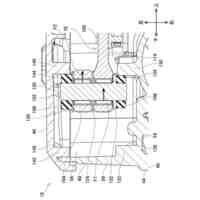
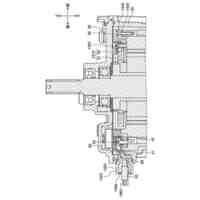
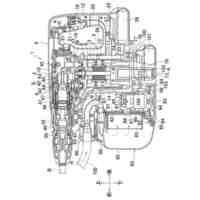
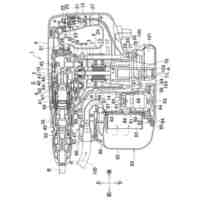
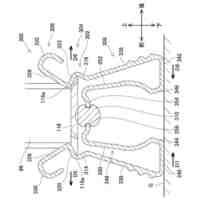
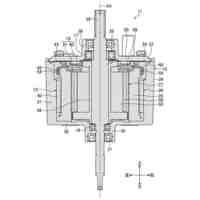
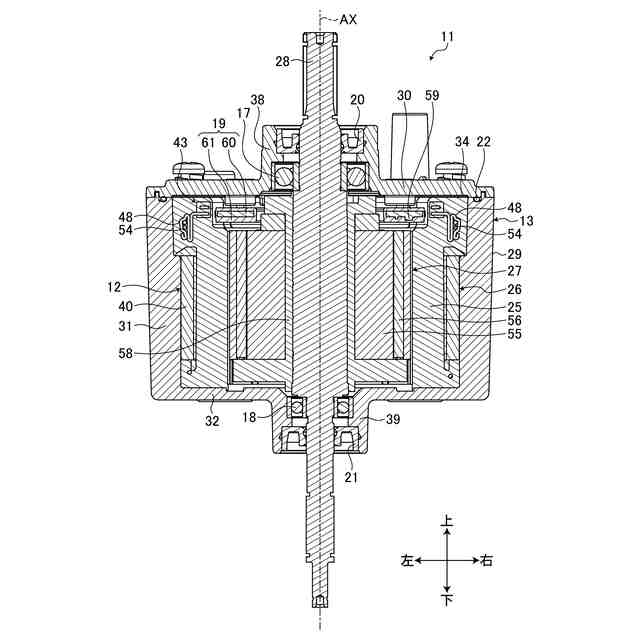
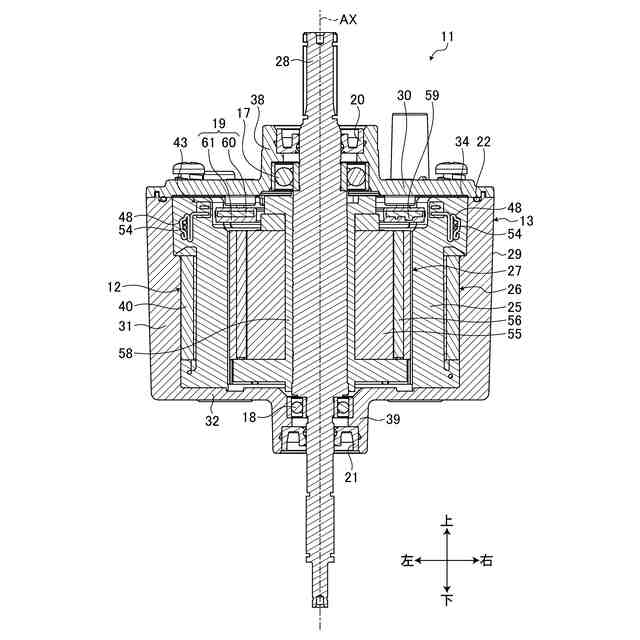
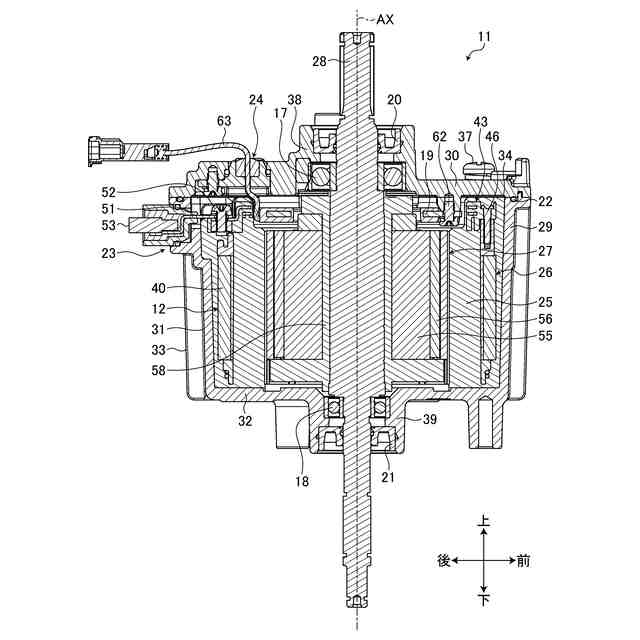
図3は、第1実施形態に係るモータアセンブリを示す縦断面図である。
図4は、第1実施形態に係るモータアセンブリを示す縦断面図である。
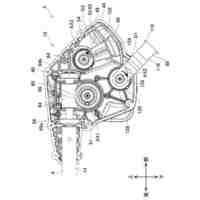
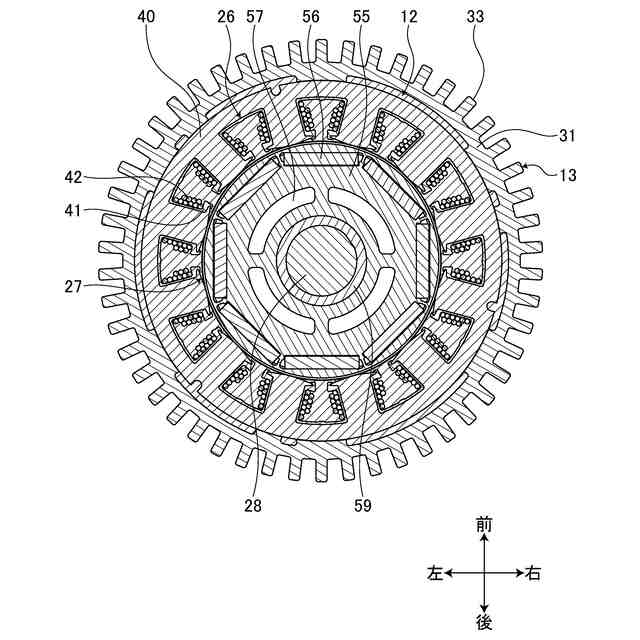
図5は、第1実施形態に係るモータアセンブリを示す横断面図である。
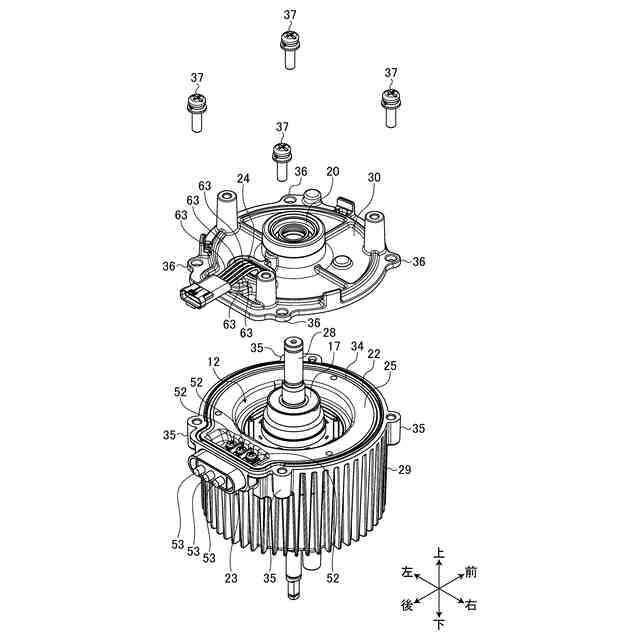
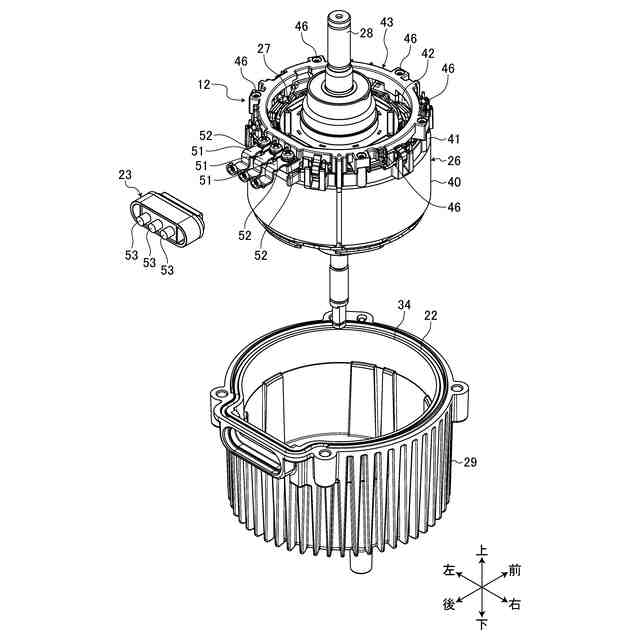
図6は、第1実施形態に係るモータアセンブリを示す分解斜視図である。
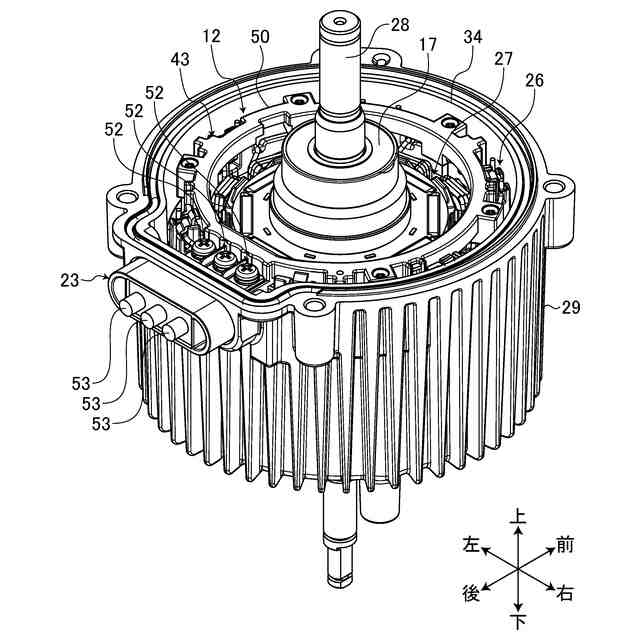
図7は、第1実施形態に係るモータアセンブリの一部を示す斜視図である。
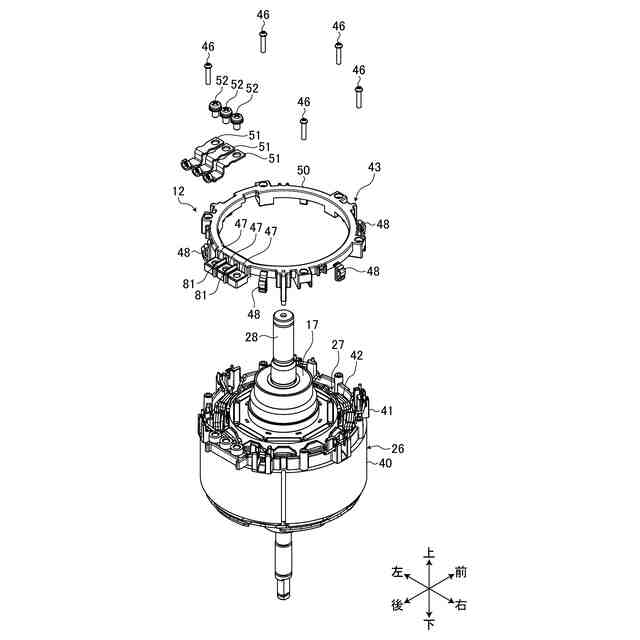
図8は、第1実施形態に係るモータアセンブリの一部を示す分解斜視図である。
図9は、第1実施形態に係るモータを示す分解斜視図である。
図10は、第1実施形態に係るステータとロータ及びロータシャフトとを示す分解斜視図である。
図11は、第1実施形態に係るステータを示す分解斜視図である。
図12は、第1実施形態に係るバスバーユニットを示す分解斜視図である。
図13は、第1実施形態に係るセンサ基板及び蓋部を示す分解斜視図である。
図14は、第1実施形態に係るセンサ基板及び蓋部を示す分解斜視図である。
図15は、第1実施形態に係る第1保持機構を示す分解斜視図である。
図16は、第1実施形態に係る第2保持機構を示す分解斜視図である。
図17は、第1実施形態に係る第1保持機構及び第2保持機構を示す断面図である。
図18は、第1実施形態に係るモータアセンブリの一部を示す断面図である。
図19は、第1実施形態に係るモータアセンブリ11の一部を示す分解斜視図である。
図20は、第1実施形態に係るモータアセンブリ11の一部を示す断面図である。
図21は、第1実施形態に係る樹脂部の形成方法を説明するための断面図である。
図22は、第1実施形態に係る樹脂部が形成された後のモータアセンブリの一部を示す斜視図である。
図23は、第2実施形態に係るステータを示す分解斜視図である。
図24は、第2実施形態に係るステータを示す断面斜視図である。
図25は、第3実施形態に係るバスバーユニットを示す斜視図である。
図26は、第3実施形態に係るバスバーユニットを示す分解斜視図である。
図27は、第4実施形態に係る区画リブを示す断面図である。
図28は、第5実施形態に係る第1保持機構を示す分解斜視図である。
図29は、第5実施形態に係る第1保持機構を示す断面図である。
図30は、第6実施形態に係る第1保持機構を示す分解斜視図である。
図31は、第6実施形態に係る第1保持機構を示す断面図である。
図32は、第7実施形態に係る第1保持機構を示す分解斜視図である。
図33は、第7実施形態に係る第1保持機構を示す断面図である。
図34は、第8実施形態に係る第1保持機構を示す分解斜視図である。
図35は、第8実施形態に係る第1保持機構を示す断面図である。
図36は、第9実施形態に係る第1保持機構を示す分解斜視図である。
図37は、第9実施形態に係る第1保持機構を示す断面図である。
図38は、第10実施形態に係る第2保持機構を示す分解斜視図である。
図39は、第10実施形態に係る第2保持機構を示す断面図である。
図40は、第11実施形態に係る第2保持機構を示す分解斜視図である。
図41は、第11実施形態に係る第2保持機構を示す断面図である。
図42は、第12実施形態に係る第2保持機構を示す斜視図である。
図43は、第12実施形態に係る第2保持機構を示す断面図である。
図44は、第13実施形態に係る第2保持機構を示す分解斜視図である。
図45は、第13実施形態に係る第2保持機構を示す断面図である。
図46は、第14実施形態に係るモータアセンブリの一部を示す断面図である。
図47は、第14実施形態に係るモータアセンブリの一部を拡大した断面図である。
図48は、第14実施形態に係るモータ及びセンサ基板を示す分解斜視図である。
図49は、第14実施形態に係るモータアセンブリの一部を示す斜視図である。
図50は、第15実施形態に係るモータアセンブリの一部を拡大した断面図である。
図51は、第16実施形態に係るモータアセンブリの一部を示す斜視図である。
図52は、第16実施形態に係るモータアセンブリの一部を拡大した断面図である。
図53は、第16実施形態に係るセンサ基板を示す斜視図である。
図54は、第17実施形態に係るセンサ基板を示す斜視図である。
図55は、第18実施形態に係るモータアセンブリの一部を示す断面図である。
図56は、第18実施形態に係るモータアセンブリの一部を示す斜視図である。
【発明を実施するための形態】
【0009】
1つ又はそれ以上の実施形態において、電動作業機は、ステータコアとインシュレータとコイルとを含むステータと、ステータに対して回転軸を中心に回転するロータと、ロータに固定されるロータシャフトと、を有するモータと、ロータシャフトにより駆動される出力部と、軸方向一方側に挿入口を有する本体部と、挿入口を塞ぐように本体部に接続される蓋部と、を有し、ステータ及びロータが収容されるモータケースと、モータの少なくとも一部を覆うようにモータケースに収容される樹脂部と、を備えてもよい。本体部は、軸方向一方側のステータの少なくとも一部を支持する支持面を有してもよい。
【0010】
上記の構成では、モータケースに対してモータが位置決めされる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
作業機
2日前
株式会社マキタ
作業機
2日前
株式会社マキタ
作業機
2日前
株式会社マキタ
電気機器
15日前
株式会社マキタ
電動作業機
2日前
株式会社マキタ
電動作業機
2日前
株式会社マキタ
電動作業機
22日前
株式会社マキタ
ドライバドリル
1日前
株式会社マキタ
ドライバドリル
23日前
株式会社マキタ
コーヒーメーカー
16日前
株式会社マキタ
電動工具用集塵システム
16日前
株式会社マキタ
電動工具用集塵システム
16日前
株式会社マキタ
背負式機器および背負子
17日前
株式会社マキタ
背負式機器および背負子
17日前
株式会社マキタ
作業機およびブレードカバー
2日前
株式会社マキタ
電動作業機およびモータ制御方法
2日前
株式会社マキタ
電動作業機及びモータアセンブリの製造方法
2日前
株式会社マキタ
電動工具用集塵アタッチメント及び電動工具
16日前
株式会社マキタ
エアコンプレッサ
15日前
個人
発電機
29日前
個人
インバーター
16日前
カヤバ株式会社
モータ
29日前
株式会社GSユアサ
蓄電装置
2日前
株式会社GSユアサ
蓄電装置
2日前
個人
共振電流制御形直流電源
22日前
国立大学法人信州大学
回転電機
22日前
株式会社アイシン
ロータ
3日前
株式会社東光高岳
開閉器
1日前
株式会社ミクニ
電動装置
1か月前
ニチコン株式会社
電源装置
22日前
株式会社アイシン
モータ装置
3日前
ブラザー工業株式会社
充電器
29日前
ブラザー工業株式会社
充電器
29日前
キヤノン株式会社
振動波モータ
17日前
コバックス株式会社
補助電源システム
29日前
株式会社ダイヘン
充電装置
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ