TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025001409
公報種別
公開特許公報(A)
公開日
2025-01-08
出願番号
2023100976
出願日
2023-06-20
発明の名称
電動作業機およびモータ制御方法
出願人
株式会社マキタ
代理人
名古屋国際弁理士法人
主分類
H02P
6/06 20060101AFI20241225BHJP(電力の発電,変換,配電)
要約
【課題】モータが無負荷状態であることを精度良く検出することが可能な電動作業機を提供する。
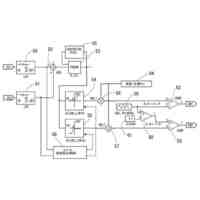
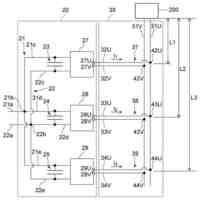
【解決手段】電動作業機は、モータと、駆動回路と、物理量取得部と、変化量導出部と、総和値算出部と、駆動制御部とを備える。物理量取得部は、検出タイミング毎に、モータの動作状態に関連する物理量を取得する。変化量導出部は、検出タイミング毎に、物理量の変化量を導出する。総和値算出部は、検出タイミング毎に、当該検出タイミングまでの第1期間に導出された変化量の総和値を算出する。駆動制御部は、総和値が無負荷検出要件を満たしたことに応じて、モータを第1の制御方式に基づいて制御する。
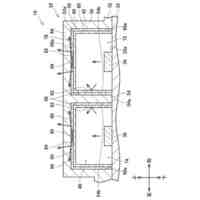
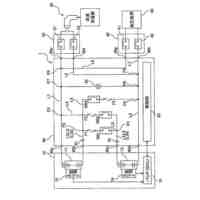
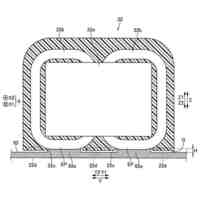
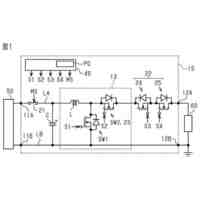
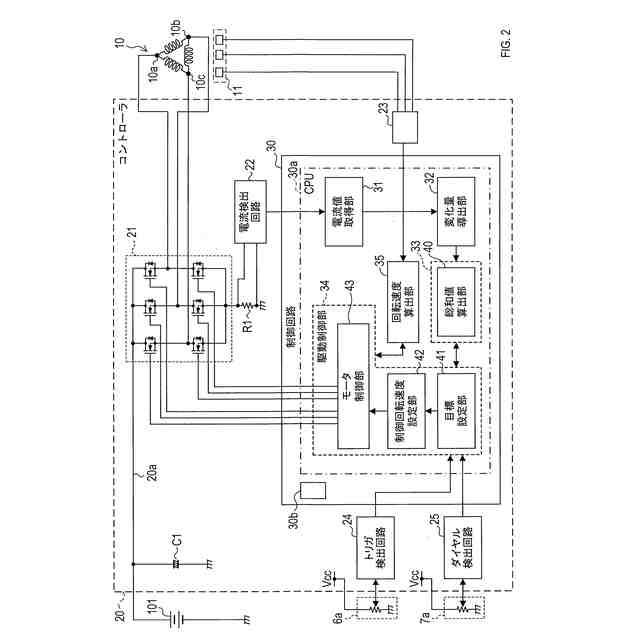
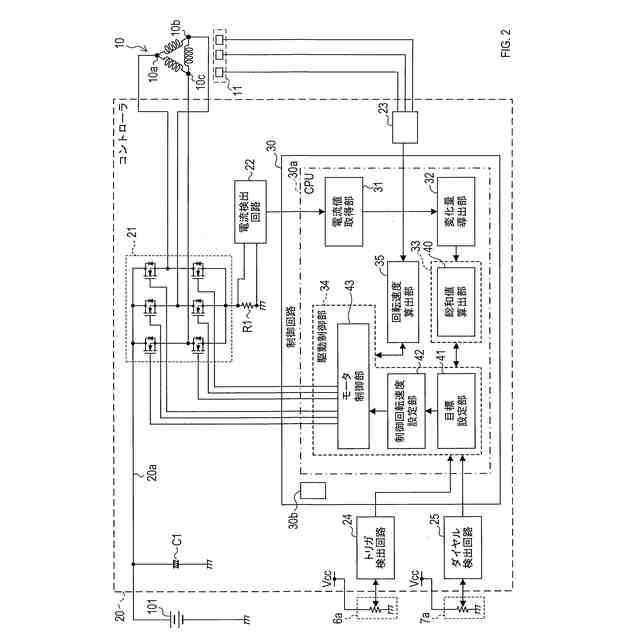
【選択図】図2
特許請求の範囲
【請求項1】
電動作業機であって、
前記電動作業機に装着された被駆動器具を駆動するように構成されたモータと、
前記モータを駆動するように構成された駆動回路と、
制御回路であって、
検出タイミング毎に、前記モータの動作状態に関連する物理量を取得するように構成された物理量取得部と、
前記検出タイミング毎に、前回の前記検出タイミングで取得された前記物理量から今回の前記検出タイミングで取得された前記物理量への変化量を導出するように構成された変化量導出部と、
前記検出タイミング毎に、第1の算出開始タイミングから当該検出タイミングまでの第1期間に前記変化量導出部により導出された前記変化量の総和値を算出するように構成された総和値算出部と、
前記総和値算出部により算出された前記総和値が、前記モータに負荷が印加されていないことを検出するための無負荷検出要件を満たしたことに応じて、前記駆動回路を介して前記モータを第1の制御方式に基づいて制御するように構成された、駆動制御部と、
を備える制御回路と、
を備える電動作業機。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の電動作業機であって、
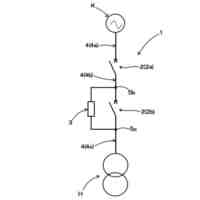
前記電動作業機は、さらに、前記モータの回転速度を設定するために前記電動作業機の使用者に手動で動かされるように構成された少なくとも1つのスイッチを備え、
前記制御回路は、さらに、前記少なくとも1つのスイッチの状態に基づいて前記モータの目標回転速度を設定するように構成された目標設定部を備え、
前記駆動制御部は、前記総和値が前記無負荷検出要件を満たしていない場合、前記第1の制御方式とは異なる第2の制御方式に基づいて前記モータを制御するように構成されており、
前記第2の制御方式は、前記目標設定部により設定された前記目標回転速度で前記モータが回転するように前記モータを制御することを含む、
電動作業機。
【請求項3】
請求項2に記載の電動作業機であって、
前記総和値算出部は、前記少なくとも1つのスイッチにより前記目標回転速度が変更された場合、その変更されたタイミングからの所定の第2期間における前記変化量を、前記総和値の算出から除外するように構成されている、
電動作業機。
【請求項4】
請求項3に記載の電動作業機であって、
前記総和値算出部は、前記少なくとも1つのスイッチにより前記目標回転速度が変更された場合、前記第1期間の始期を、前記第1の算出開始タイミングから第2の算出開始タイミングに切り替えるように構成されており、
前記第2の算出開始タイミングは、前記第2期間の終期に対応する、
電動作業機。
【請求項5】
請求項3または請求項4に記載の電動作業機であって、
前記制御回路は、さらに、(i)前記目標回転速度に基づいて制御回転速度を算出し、(ii)前記目標回転速度が変更された場合には前記制御回転速度を現在の前記制御回転速度から前記目標回転速度まで徐々に変化させる、ように構成された制御回転速度算出部を備え、
前記第2の制御方式は、前記モータの回転速度が前記制御回転速度に一致するように前記モータを制御することを含み、
前記第2期間は、前記目標回転速度が変更されてから、前記制御回転速度算出部により前記制御回転速度が前記目標回転速度に到達するまで、の期間を含む、
電動作業機。
【請求項6】
請求項5に記載の電動作業機であって、
前記第2期間は、さらに、前記制御回転速度算出部により前記制御回転速度が前記目標回転速度に到達してから第1時間が経過するまで、を含む、
電動作業機。
【請求項7】
請求項3~請求項6のいずれか1項に記載の電動作業機であって、
前記総和値算出部は、前記第1期間内において、前記検出タイミングが到来する度に前記変化量を累算することにより前記総和値を算出するように構成されており、
前記総和値算出部は、前記少なくとも1つのスイッチが動かされてそれによって前記目標回転速度が変更された場合、現在算出されている前記総和値をリセットするように構成されている、
電動作業機。
【請求項8】
請求項2~請求項7のいずれか1項に記載の電動作業機であって、
前記少なくとも1つのスイッチは、第1のスイッチを備え、
前記目標設定部は、前記使用者による前記第1のスイッチの位置に応じて前記目標回転速度を変化させるように構成されている、
電動作業機。
【請求項9】
請求項8に記載の電動作業機であって、
前記少なくとも1つのスイッチは、第2のスイッチを備え、
前記目標設定部は、前記第2のスイッチの位置に応じた最大回転速度を上限として、前記目標回転速度を変化させるように構成されている、
電動作業機。
【請求項10】
請求項1~請求項9のいずれか1項に記載の電動作業機であって、
前記無負荷検出要件は、前記総和値算出部により算出された前記総和値が所定の大きさであることに基づいて満たされ、前記所定の大きさは所定の閾値以下に対応する、
電動作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、電動作業機におけるモータを制御する技術に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、ソフトノーロード制御を実行するように構成された電動機械器具が開示されている。ソフトノーロード制御では、モータが駆動を開始してからモータが負荷状態であることが検出されるまでの間、モータの出力が抑えられる。モータが負荷状態であることが検出されると、ソフトノーロード制御が解除される。
【先行技術文献】
【特許文献】
【0003】
特許第6154242号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
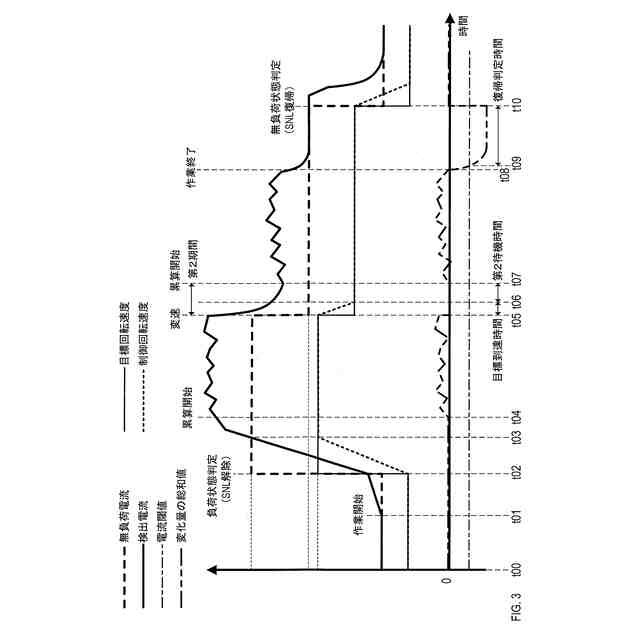
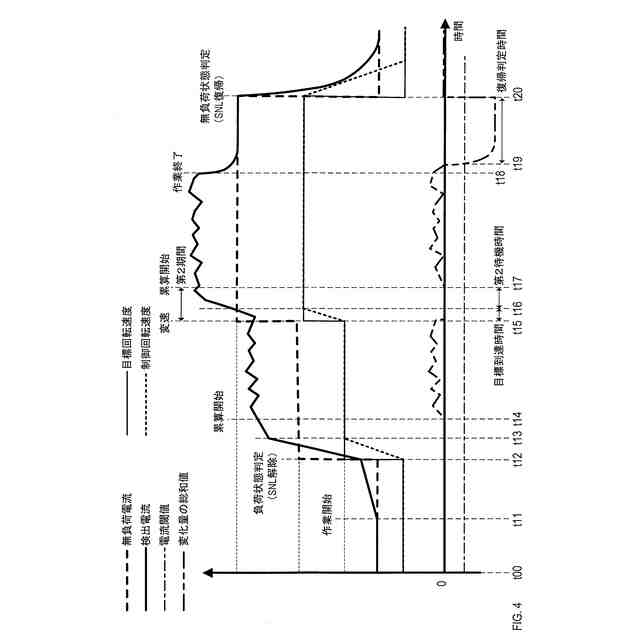
ソフトノーロード制御が解除された後、モータが負荷状態から無負荷状態に変化することが起こりえる。例えば、電動機械器具が、ノコ刃によって被加工材を切断可能に構成されていることを想定する。この場合、被加工材を切断している間(即ち負荷状態)、モータの駆動状態が維持されたまま、ノコ刃が一時的に被加工材から離されてモータが無負荷状態に変化することが起こりえる。
【0005】
モータが負荷状態から無負荷状態に変化した場合、その変化に応じた適切な制御が行われる(例えばソフトノーロード制御が再び実行される)と、電動機械器具の利便性が高まる。そのためには、モータの無負荷状態を精度良く検出できることが望まれる。
【0006】
本開示の一局面は、モータが無負荷状態であることを精度良く検出することが可能な電動作業機を提供することを目的とする。
【課題を解決するための手段】
【0007】
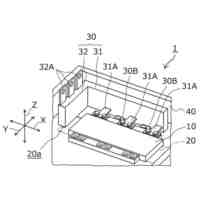
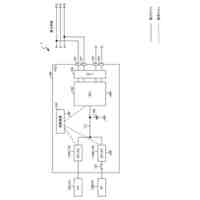
本開示の一局面は、モータと、駆動回路と、制御回路とを備えている電動作業機を提供する。
モータは、電動作業機に装着された被駆動器具を駆動するように構成されている。駆動回路は、モータを駆動するように構成されている。制御回路は、物理量取得部と、変化量導出部と、総和値算出部と、駆動制御部とを備える。
【0008】
物理量取得部は、検出タイミング毎に、モータの動作状態に関連する物理量を取得する。
変化量導出部は、検出タイミング毎に、前回の検出タイミングで取得された物理量から今回の検出タイミングで取得された物理量への変化量を導出する。
【0009】
総和値算出部は、検出タイミング毎に、第1の算出開始タイミングから当該検出タイミングまでの第1期間に変化量導出部により導出された変化量の総和値を算出する。
駆動制御部は、総和値算出部により算出された総和値が無負荷検出要件を満たしたことに応じて、駆動回路を介してモータを第1の制御方式に基づいて制御する。無負荷検出要件は、モータに負荷が印加されていないことを検出するために要求される。
【0010】
総和値が無負荷検出要件を満たすことは、モータが、モータに負荷が印加されていない無負荷状態であることに対応する。無負荷状態は、モータに負荷が全く印加されていない状態を含む。無負荷状態は、モータに所定の大きさ以下の負荷が印加されている状態を含んでいてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
作業機
12日前
株式会社マキタ
クリーナ
8日前
株式会社マキタ
表示装置
12日前
株式会社マキタ
作業機システムおよび作業機
15日前
株式会社マキタ
レシプロソー用のブレード及びレシプロソー
13日前
個人
ファスナー式コード束ね
今日
個人
回転電気装置及び発電装置
1日前
ニチコン株式会社
電力変換装置
5日前
ミネベアミツミ株式会社
回転機器
5日前
株式会社ダイヘン
電気機器
6日前
矢崎総業株式会社
配電装置
7日前
矢崎総業株式会社
配電装置
5日前
株式会社豊田自動織機
回転電機のロータ
今日
株式会社コスメック
自立発電装置
1日前
鹿島建設株式会社
分電盤の配置構造
7日前
富士電機株式会社
電力変換装置
7日前
富士電機株式会社
電力変換装置
7日前
富士電機株式会社
電力変換装置
7日前
富士電機株式会社
電力変換装置
7日前
日産自動車株式会社
インバータ
5日前
富士電機株式会社
電力変換装置
7日前
高周波熱錬株式会社
電源装置
今日
高周波熱錬株式会社
電源装置
今日
株式会社SUBARU
モータの冷却構造
8日前
株式会社ダイヘン
蓄電池システム
6日前
シンフォニアテクノロジー株式会社
モータ
7日前
日新イオン機器株式会社
駆動装置および真空装置
7日前
矢崎総業株式会社
グロメット
6日前
ニデック株式会社
ステータ、モータ及びドローン
今日
株式会社村田製作所
電源装置及びプログラム
1日前
豊田合成株式会社
太陽光発電給電装置
1日前
株式会社アイシン
バッテリケース
1日前
株式会社力電
励磁突入電流の抑制回路システム
今日
株式会社東芝
磁性楔及び回転電機
6日前
日立Astemo株式会社
電動駆動装置
8日前
京セラ株式会社
電力変換装置
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ