TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025046011
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023154134
出願日
2023-09-21
発明の名称
駆動装置および真空装置
出願人
日新イオン機器株式会社
代理人
主分類
H02P
8/24 20060101AFI20250326BHJP(電力の発電,変換,配電)
要約
【課題】移動体が所定の移動動作を開始してから停止するまでに要する時間を従来と比較して短縮できる駆動装置、および真空装置を提供する。
【解決手段】
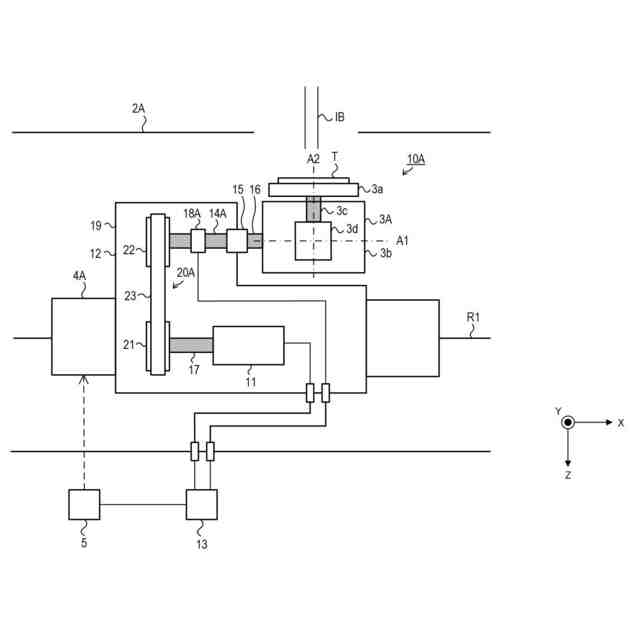
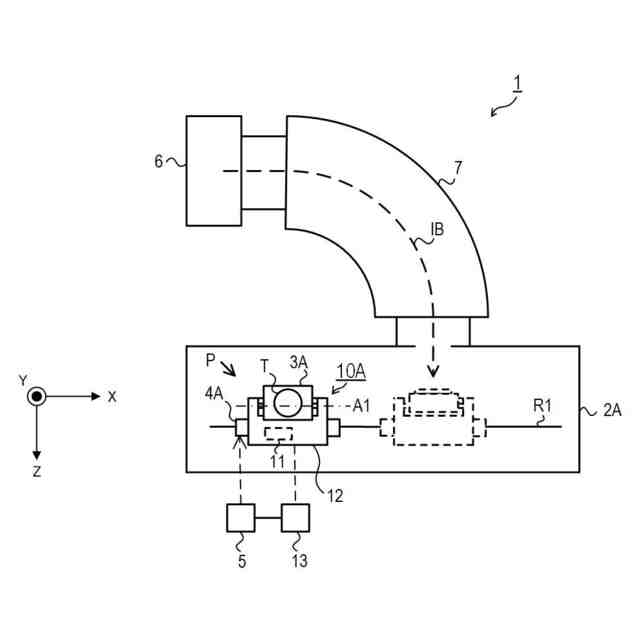
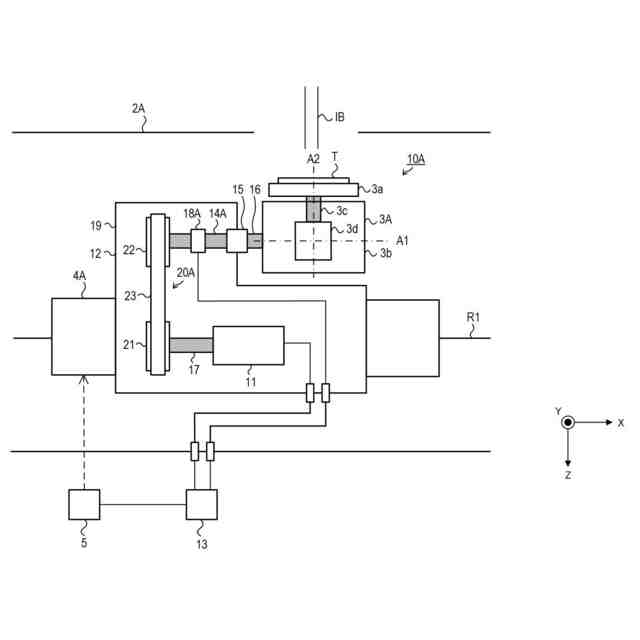
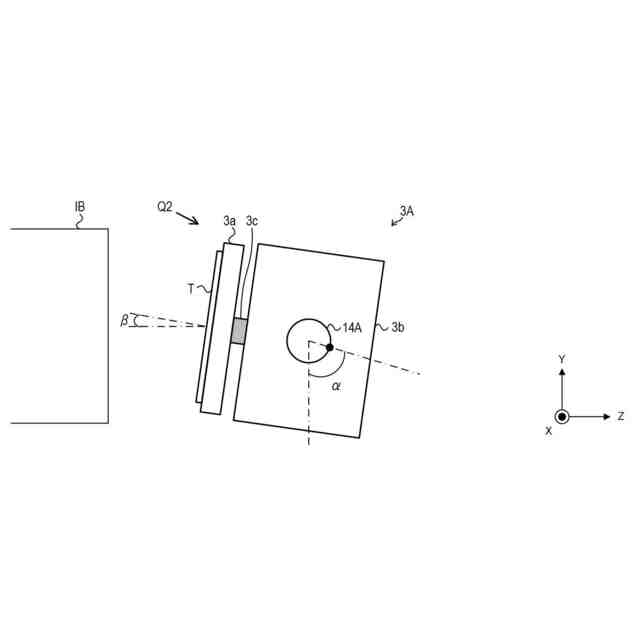
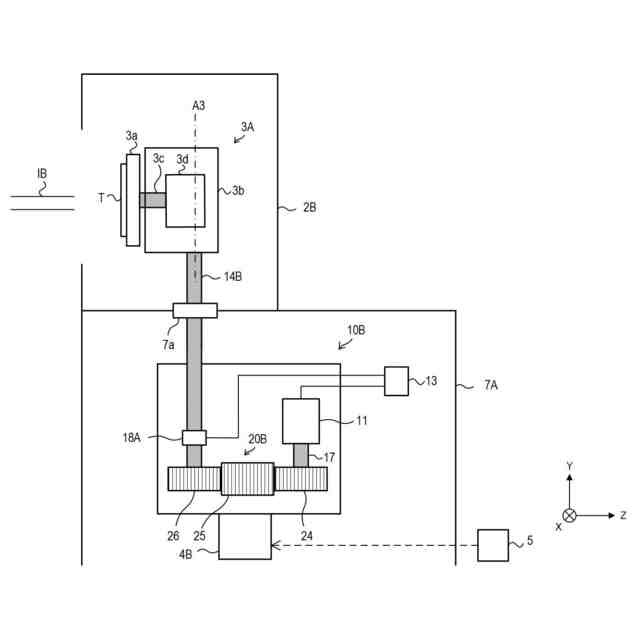
真空装置1に使用される駆動装置10Aは、移動体3Aに接続された駆動部材14A、ステッピングモーター11、動力伝達ユニット20A、およびステッピングモーター11を制御する制御ユニット13、および駆動部材14Aの停止位置情報を制御ユニット13に送信するエンコーダー18Aを備える。制御ユニット13は、停止位置情報に基づいて、設定された駆動パルス数を変更するパルス数変更処理を行う。
【選択図】図2
特許請求の範囲
【請求項1】
処理対象物に所定の処理を施す真空装置に使用され、真空環境下に配置された移動体が所定の移動動作を行うように前記移動体を移動させる駆動装置であって、
前記移動体に直接または間接的に接続され、前記移動体を移動させる駆動部材と、
前記駆動部材を駆動させる動力を出力するステッピングモーターと、
前記ステッピングモーターと前記駆動部材との間に介在し、前記ステッピングモーターから前記駆動部材に前記動力を伝達する動力伝達ユニットと、
前記ステッピングモーターの動作を制御する制御ユニットと、
前記ステッピングモーターが停止するのに伴って前記駆動部材が停止した位置に関連する停止位置情報を取得し、前記停止位置情報を前記制御ユニットに送信するエンコーダーと、
を備え、
前記制御ユニットが、 前記移動動作に必要なパルス数として予め設定された駆動パルス数を有するパルス信号を前記ステッピングモーターに入力して前記ステッピングモーターを動作させた後、前記停止位置情報に基づいて、設定された前記駆動パルス数を変更するパルス数変更処理を行い得るように構成されている、
駆動装置。
続きを表示(約 1,000 文字)
【請求項2】
前記制御ユニットが、
前記ステッピングモーターを動作させた後、前記停止位置情報に応じて、少なくとも、
前記駆動部材が所定の範囲内で停止したと判定するとともに前記パルス数変更処理が不要であると判定し、前記駆動部材が停止した状態を維持させる第一の制御と、
前記駆動部材が前記所定の範囲内で停止したと判定するとともに前記パルス数変更処理が必要であると判定し、前記駆動部材が停止した状態を維持させるとともに、前記パルス数変更処理を行う第二の制御と、
を含む複数の制御のうち、いずれか一つを選択して行うように構成されている、
請求項1に記載の駆動装置。
【請求項3】
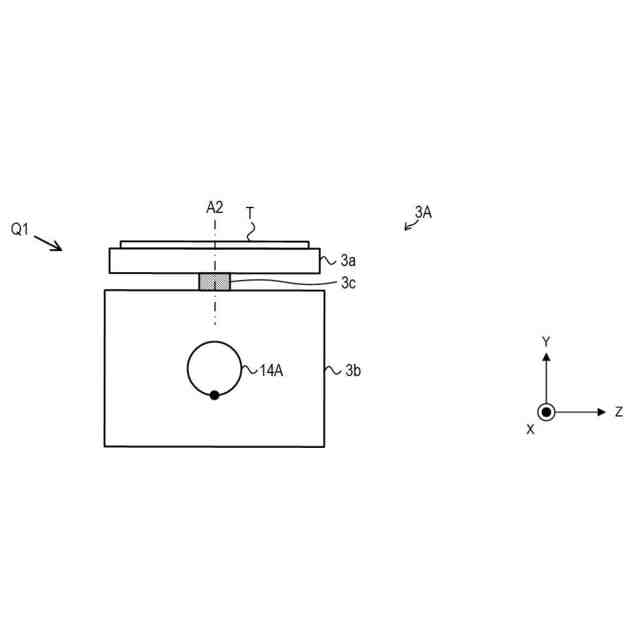
前記移動体が、前記処理対象物を保持する保持装置であり、
前記移動動作が、前記処理対象物を保持した前記保持装置を前記処理が施される位置に移動させる動作である、請求項1または2に記載の駆動装置。
【請求項4】
前記動力伝達ユニットが、前記動力を伝達する動力伝達部材を有し、
前記動力伝達部材が弾性を有する、請求項1または2に記載の駆動装置。
【請求項5】
真空環境下に配置された移動体が所定の移動動作を行うように前記移動体を移動させる駆動装置を備え、処理対象物に所定の処理を施す真空装置であって、
前記駆動装置が、
前記移動体に直接または間接的に接続され、前記移動体を移動させる駆動部材と、
前記駆動部材を駆動させる動力を出力するステッピングモーターと、
前記ステッピングモーターと前記駆動部材との間に介在し、前記ステッピングモーターから前記駆動部材に前記動力を伝達する動力伝達ユニットと、
前記ステッピングモーターの動作を制御する制御ユニットと、
前記ステッピングモーターが停止するのに伴って前記駆動部材が停止した位置に関連する停止位置情報を取得し、前記停止位置情報を前記制御ユニットに送信するエンコーダーと、
を備え、
前記制御ユニットが、
前記移動動作に必要なパルス数として予め設定された駆動パルス数を有するパルス信号を前記ステッピングモーターに入力して前記ステッピングモーターを動作させた後、前記停止位置情報に基づいて、設定された前記駆動パルス数を変更するパルス数変更処理を行い得るように構成されている、
真空装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、高真空環境下に配置された移動体を移動させる駆動装置、および当該駆動装置を備える真空装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
半導体やフラットパネルディスプレイ等、様々な製品の製造工程において真空装置が使用されている。この真空装置は、真空環境下で処理対象物に所定の処理を施すものである。このような真空装置では、一般に、処理対象物を搬送するロボットや処理対象物を保持する保持装置等が予め定められた動作を精度よく行い、処理対象物を移動させる。
【0003】
また、真空装置は、一般に、例えば上述のロボットや保持装置等の一部であり、装置内を所定の移動動作で移動する移動体を駆動させる駆動装置を備えている。このような駆動装置には、当該移動体を移動させる際に、移動体を所定の位置で精度よく停止させることが求められる場合がある。
【0004】
真空環境下に置かれた移動体を移動させる駆動装置に高い位置決め精度が求められる場合、一般に、移動体の停止位置をセンサーで検出し、検出した結果に基づいて再度駆動装置を駆動させるフィードバック制御が採用される。このようなフィードバック制御を行う駆動装置の一例として、特開2023-067381に開示された駆動機構がある。
【0005】
この駆動機構は、イオンビームが照射される基板を保持するホルダーを回転移動させるための装置であり、ホルダーに連結された第1軸部材と、サーボモーターと、第1軸部材とサーボモーターの間に配置された複数の伝達ギアとを備えている。また、この駆動機構は、第1軸部材の回転角を検出する外部エンコーダーをさらに備えており、外部エンコーダーが検出した回転角に基づいてサーボモーターが制御される。また、この駆動機構では、第1軸部材の一部、伝達ギア、サーボモーター、および外部エンコーダーが、一つのケーシングに収容されることで大気圧環境下に置かれている。
【0006】
この駆動機構では、外部エンコーダーが、サーボモーターの動力をホルダーに伝達する動力伝達経路におけるホルダーに近い位置で第一軸部材の回転角を検出している。したがって、この駆動機構は精度よくホルダーを位置決めすることができる。
【0007】
しかしながら、この駆動機構は、例えば伝達ギアのバックラッシュが大きい場合、伝達ギアのがたつきが収まる前にサーボモーターへのフィードバック制御がかかることが繰り返されることによって、第1軸部材が停止位置を収束させるのに時間を要する。
【0008】
また、伝達ギアに代えて、プーリーとゴムベルトを使用してサーボモーターの動力をホルダーに伝える構成も考えられるが、この場合、ゴムベルトの弾性による伸縮によって、伝達ギアを用いた場合と同様に第1軸部材が停止位置を収束させるのに時間を要する。そして、この駆動機構では、サーボモーターを使用していることから、高速でホルダーを停止させようとする、つまり、高速で第1軸部材を停止させようとするほど、第1軸部材を停止させるのに時間を要することになり、ハンチング現象が生じる恐れもある。
【先行技術文献】
【特許文献】
【0009】
特開2023-067381
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、移動体を停止させる位置を精度よく制御できるとともに、移動体が所定の移動動作を開始してから停止するまでに要する時間を従来と比較して短縮できる駆動装置、および真空装置を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ