TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024180253
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023209777,2023098866
出願日
2023-12-13,2023-06-16
発明の名称
遠隔制御無効化装置、車両および遠隔制御無効化方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B62D
65/18 20060101AFI20241219BHJP(鉄道以外の路面車両)
要約
【課題】移動体の遠隔制御機能の全てが無効化されることにより利便性が損なわれることを抑制する。
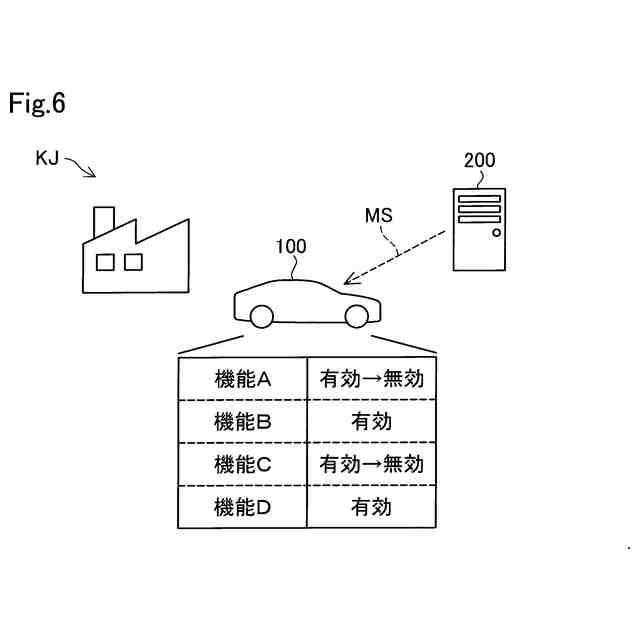
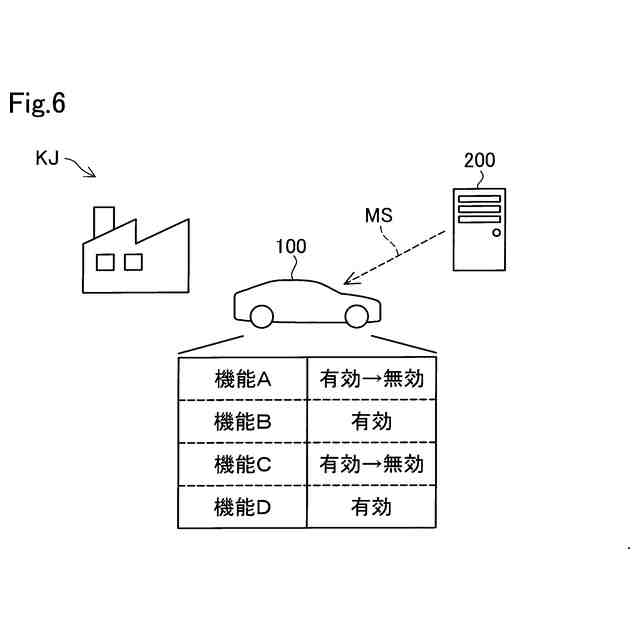
【解決手段】遠隔制御無効化装置は、遠隔制御により実行される移動体の複数の機能のうち、有効と無効との切り替え対象とする一部の機能を決定する決定部と、上記一部の機能の有効と無効とを移動体に切り替えさせる信号を送信する送信部と、を備える。
【選択図】図6
特許請求の範囲
【請求項1】
遠隔制御無効化装置であって、
遠隔制御により実行される移動体の複数の機能のうち、有効と無効との切り替え対象とする一部の機能を決定する決定部と、
前記一部の機能の有効と無効とを前記移動体に切り替えさせる信号を送信する送信部と、
を備える、遠隔制御無効化装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の遠隔制御無効化装置であって、
前記移動体は、前記移動体を製造する工場において遠隔制御され、
前記決定部は、前記移動体の製造工程の進度に応じて、前記一部の機能を決定する、遠隔制御無効化装置。
【請求項3】
請求項2に記載の遠隔制御無効化装置であって、
前記移動体は、車両であり、
前記送信部は、前記移動体が前記工場からの出荷待ち状態である場合に、前記移動体のシフトポジションを変更する機能の有効と無効とを切り替えさせる信号を送信する、遠隔制御無効化装置。
【請求項4】
請求項1に記載の遠隔制御無効化装置であって、
前記一部の機能には、前記移動体を加速させる機能と前記移動体を減速させる機能とが含まれる、遠隔制御無効化装置。
【請求項5】
請求項1に記載の遠隔制御無効化装置であって、
前記一部の機能には、前記移動体の進行方向を変更する機能が含まれる、遠隔制御無効化装置。
【請求項6】
請求項1に記載の遠隔制御無効化装置であって、
前記一部の機能には、予め定められた速度を超えて移動する機能が含まれる、遠隔制御無効化装置。
【請求項7】
請求項1に記載の遠隔制御無効化装置であって、
前記複数の機能には、第1機能と、前記第1機能とは異なる第2機能とが含まれており、
前記決定部は、予め定められた第1条件を満たす場合には、前記第1機能を前記一部の機能に決定し、前記第1条件とは異なる予め定められた第2条件を満たす場合には、前記第2機能を前記一部の機能に決定する、遠隔制御無効化装置。
【請求項8】
遠隔制御により動作可能な移動体であって、
遠隔制御により実行される前記移動体の複数の機能のうち、有効と無効との切り替え対象とする一部の機能を示す情報を取得する取得部と、
前記情報を用いて、前記一部の機能の有効と無効との切り替えを実行する実行部と、
を備える、移動体。
【請求項9】
遠隔制御無効化方法であって、
遠隔制御により実行される移動体の複数の機能のうち、有効と無効との切り替え対象とする一部の機能を決定し、
前記一部の機能の有効と無効とを前記移動体に切り替える、
遠隔制御無効化方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、遠隔制御無効化装置、移動体および遠隔制御無効化方法
に関する。
続きを表示(約 3,700 文字)
【背景技術】
【0002】
車両の製造工程において、遠隔制御により車両を走行させる技術が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両などの移動体の遠隔制御が第三者により行われることを抑制するためには、移動体が工場から出荷される際に、移動体の遠隔制御機能が無効化されていることが好ましい。しかしながら、遠隔制御機能の全てを無効化すると、利便性が損なわれる可能性がある。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の第1の形態によれば、遠隔制御無効化装置が提供される。この遠隔制御無効化装置は、遠隔制御により実行される移動体の複数の機能のうち、有効と無効との切り替え対象とする一部の機能を決定する決定部と、前記一部の機能の有効と無効とを前記移動体に切り替えさせる信号を送信する送信部と、を備える。
この形態の遠隔制御無効化装置によれば、遠隔制御により実行される機能の全ての有効と無効とを切り替えるのではなく、遠隔制御により実行される機能の一部の有効と無効とを切り替えることができるため、利便性が損なわれることを抑制することができる。
(2)上記形態の遠隔制御無効化装置において、前記移動体は、前記移動体を製造する工場において遠隔制御され、前記決定部は、前記移動体の製造工程の進度に応じて、前記一部の機能を決定してもよい。
この形態の遠隔制御無効化装置によれば、移動体の製造工程の進度に応じて遠隔制御により実行される機能の一部の有効と無効とを切り替えることができるため、利便性が損なわれることを抑制することができる。
(3)上記形態の遠隔制御無効化装置において、前記移動体は、車両であり、前記送信部は、前記移動体が前記工場からの出荷待ち状態である場合に、前記移動体のシフトポジションを変更する機能の有効と無効とを切り替えさせる信号を送信してもよい。
この形態の遠隔制御無効化装置によれば、出荷後に第三者による遠隔制御によりシフトポジションの変更が実行されることを抑制することができる。
(4)上記形態の遠隔制御無効化装置において、前記一部の機能には、前記移動体を加速させる機能と前記移動体を減速させる機能とが含まれてもよい。
この形態の遠隔制御無効化装置によれば、第三者による遠隔制御により移動体が加速および減速することを抑制できる。
(5)上記形態の遠隔制御無効化装置において、前記一部の機能には、前記移動体の進行方向を変更する機能が含まれてもよい。
この形態の遠隔制御無効化装置によれば、第三者による遠隔制御により移動体の進行方向が変更されることを抑制できる。
(6)上記形態の遠隔制御無効化装置において、前記一部の機能には、予め定められた速度を超えて移動する機能が含まれてもよい。
この形態の遠隔制御無効化装置によれば、第三者による遠隔制御により移動体が所定の速度を超えて移動することを抑制できる。
(7)上記形態の遠隔制御無効化装置において、前記複数の機能には、第1機能と、前記第1機能とは異なる第2機能とが含まれており、前記決定部は、予め定められた第1条件を満たす場合には、前記第1機能を前記一部の機能に決定し、前記第1条件とは異なる予め定められた第2条件を満たす場合には、前記第2機能を前記一部の機能に決定してもよい。
この形態の遠隔制御無効化装置によれば、条件に応じて、有効と無効とを切り替える機能を異ならせることができる。
(8)本開示の第2の形態によれば、遠隔制御により移動可能な移動体が提供される。この移動体は、遠隔制御により実行される前記移動体の複数の機能のうち、有効と無効との切り替え対象とする一部の機能を示す情報を取得する取得部と、前記情報を用いて、前記一部の機能の有効と無効との切り替えを実行する実行部と、を備える。
この形態の移動体によれば、遠隔制御により実行される機能の全ての有効と無効とを切り替えるのではなく、遠隔制御により実行される機能の一部の有効と無効とを切り替えることができるため、利便性が損なわれることを抑制することができる。
(9)本開示の第3の形態によれば、遠隔制御無効化方法が提供される。この遠隔制御無効化方法は、遠隔制御により実行される移動体の複数の機能のうち、有効と無効との切り替え対象とする一部の機能を決定し、前記一部の機能の有効と無効とを前記移動体に切り替える。
この形態の遠隔制御無効化方法によれば、遠隔制御により実行される機能の全ての有効と無効とを切り替えるのではなく、遠隔制御により実行される機能の一部の有効と無効とを切り替えることができるため、利便性が損なわれることを抑制することができる。
本開示は、遠隔制御無効化装置、移動体および遠隔制御無効化方法以外の種々の形態で実現することも可能である。例えば、遠隔制御無効化システム、遠隔制御無効化方法、車両、コンピュータプログラム、および、コンピュータプログラムが記録された記録媒体などの形態で実現することができる。
【図面の簡単な説明】
【0007】
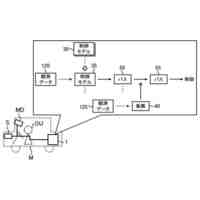
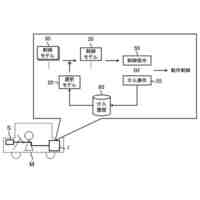
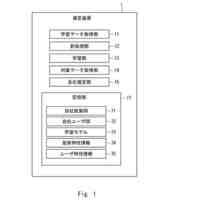
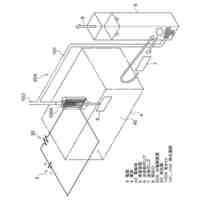
第1実施形態の遠隔制御無効化システムの構成を示す説明図。
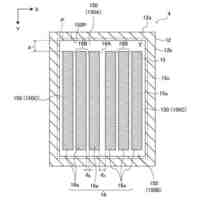
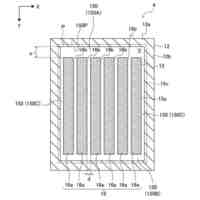
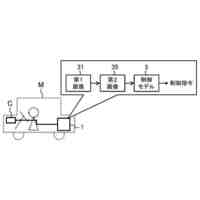
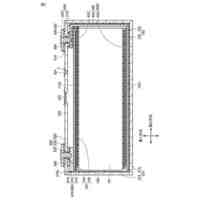
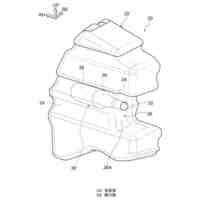
第1実施形態の車両の構成を示す説明図。
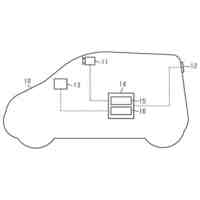
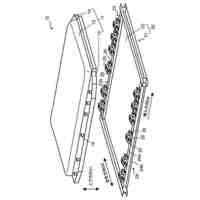
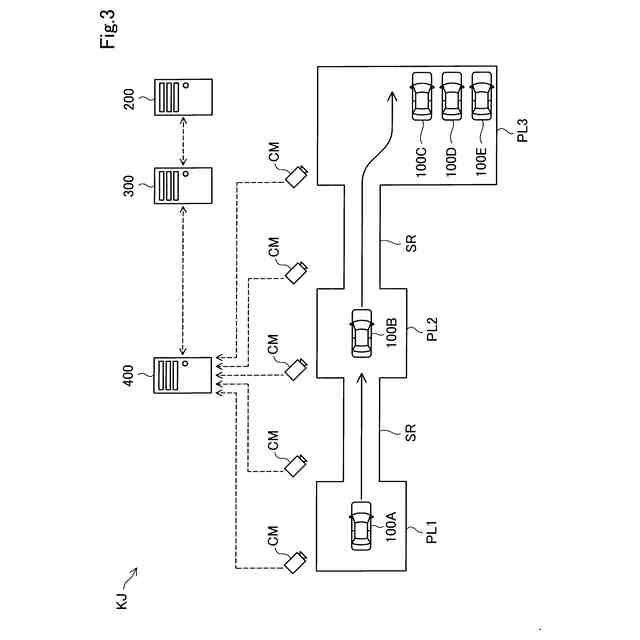
工場において車両が遠隔制御により移動する様子を示す説明図。
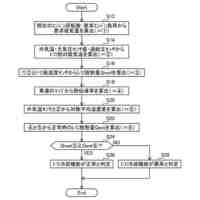
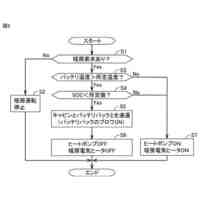
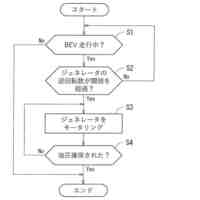
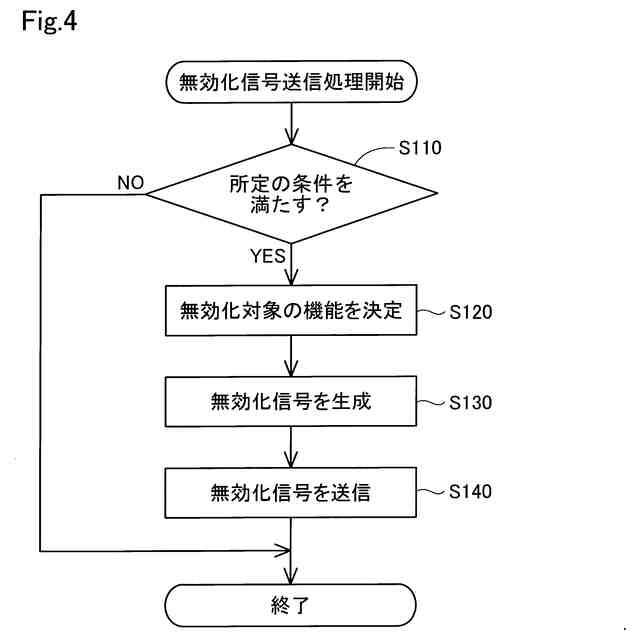
第1実施形態の無効化信号送信処理の内容を示すフローチャート。
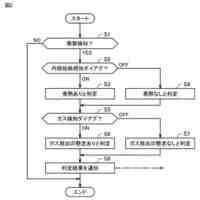
第1実施形態の無効化実行処理の内容を示すフローチャート。
車両の遠隔制御機能の一部が無効化される様子を示す説明図。
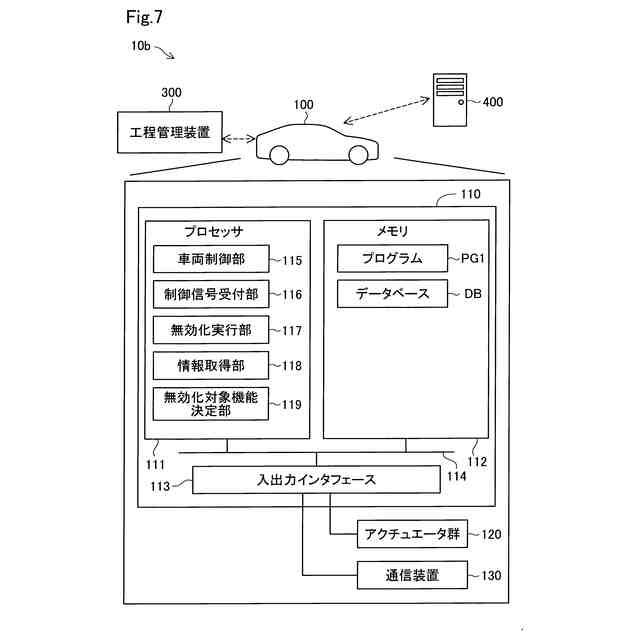
第2実施形態の遠隔制御無効化システムの構成を示す説明図。
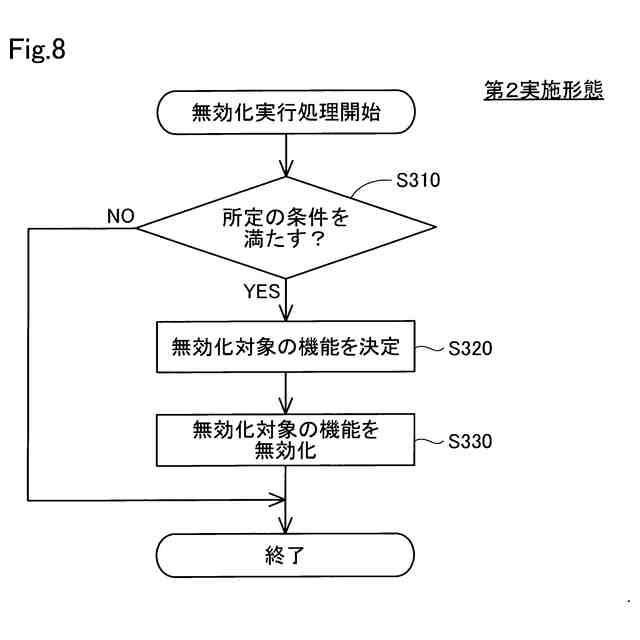
第2実施形態の無効化実行処理の内容を示すフローチャート。
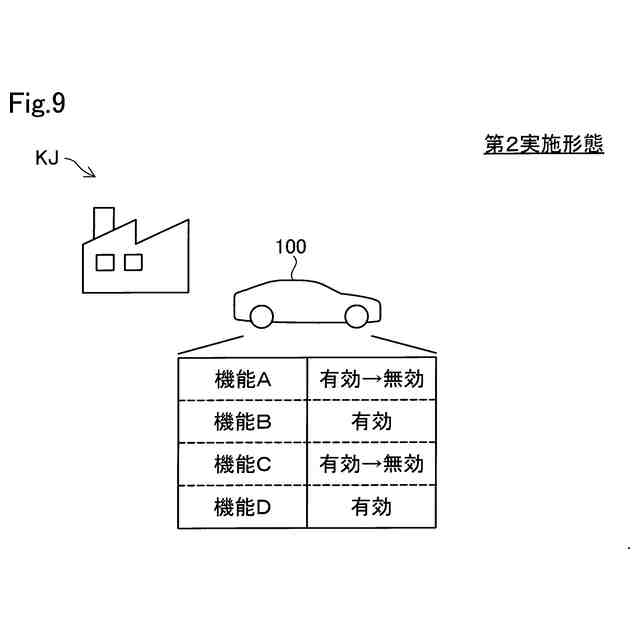
車両の遠隔制御機能の一部が無効化される様子を示す説明図。
【発明を実施するための形態】
【0008】
A.第1実施形態:
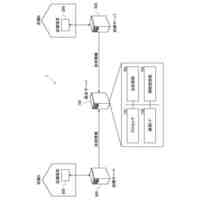
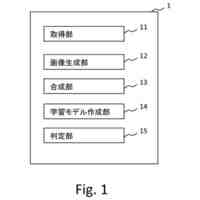
図1は、第1実施形態における遠隔制御無効化システム10の構成を示す説明図である。図2は、第1実施形態における車両100の構成を示す説明図である。遠隔制御無効化システム10は、移動体の遠隔制御機能を無効化するために用いられる。本実施形態では、移動体は、車両100である。より具体的には、移動体は、電気自動車(BEV:Battery Electric Vehicle)である。なお、移動体は、電気自動車に限られず、例えば、ガソリン自動車や、ハイブリッド自動車や、燃料電池自動車でもよい。移動体は、車両100に限られず、例えば、電動垂直離着陸機(いわゆる空飛ぶ自動車)でもよい。
【0009】
図1に示すように、本実施形態では、遠隔制御無効化システム10は、遠隔制御により動作可能な車両100と、遠隔制御無効化装置200と、工程管理装置300とを備えている。遠隔制御無効化装置200および工程管理装置300は、車両100を製造する工場に配置されている。工場には、さらに、車両100を遠隔制御するための遠隔制御装置400が配置されている。本開示において、車両100が外部から遠隔制御されることにより車両100が実行する機能のことを遠隔制御機能と呼ぶ。
【0010】
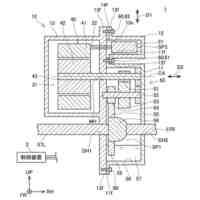
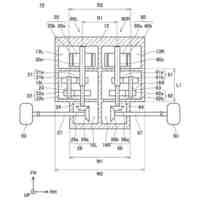
図2に示すように、車両100は、車両100の各部を制御するための車両制御装置110と、車両制御装置110の制御下で駆動するアクチュエータ群120と、無線通信により遠隔制御無効化装置200および遠隔制御装置400と通信するための通信装置130とを備えている。アクチュエータ群120には、少なくとも1つのアクチュエータが含まれている。本実施形態では、アクチュエータ群120には、車両100を加速させるための駆動装置のアクチュエータ、車両100の進行方向を変更するための操舵装置のアクチュエータ、および、車両100を減速させるための制動装置のアクチュエータが含まれている。駆動装置には、バッテリ、バッテリの電力により駆動する走行用モータ、および、走行用モータにより回転する駆動輪が含まれている。駆動装置のアクチュエータには、走行用モータが含まれている。なお、アクチュエータ群120には、例えば、車両100の警笛を鳴動させるためのアクチュエータや、車両100の灯火装置の点灯と消灯とを切り替えるためのアクチュエータなどが含まれてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
方法
3日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
電動車
10日前
トヨタ自動車株式会社
内燃機関
10日前
トヨタ自動車株式会社
駆動装置
10日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
駆動装置
3日前
トヨタ自動車株式会社
電池装置
10日前
トヨタ自動車株式会社
電池装置
10日前
トヨタ自動車株式会社
供給装置
3日前
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
内燃機関
3日前
トヨタ自動車株式会社
システム
10日前
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
解析装置
3日前
トヨタ自動車株式会社
駆動装置
10日前
トヨタ自動車株式会社
推定装置
10日前
トヨタ自動車株式会社
蓄電セル
3日前
トヨタ自動車株式会社
駆動装置
3日前
トヨタ自動車株式会社
駆動装置
5日前
トヨタ自動車株式会社
駆動装置
5日前
トヨタ自動車株式会社
駆動装置
11日前
トヨタ自動車株式会社
蓄電セル
3日前
トヨタ自動車株式会社
内燃機関
3日前
トヨタ自動車株式会社
締結構造
11日前
トヨタ自動車株式会社
シール構造
11日前
トヨタ自動車株式会社
水電解方法
10日前
トヨタ自動車株式会社
芯出し治具
10日前
トヨタ自動車株式会社
電池パック
4日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ