TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024177821
公報種別
公開特許公報(A)
公開日
2024-12-24
出願番号
2023096168
出願日
2023-06-12
発明の名称
プログラム、情報処理装置及び情報処理方法
出願人
株式会社東芝
代理人
弁理士法人酒井国際特許事務所
主分類
G06T
7/33 20170101AFI20241217BHJP(計算;計数)
要約
【課題】カメラの位置姿勢、及び、画像特徴の3次元情報の少なくとも一方の算出に掛かる計算コストの削減を、精度を維持したまま行う。
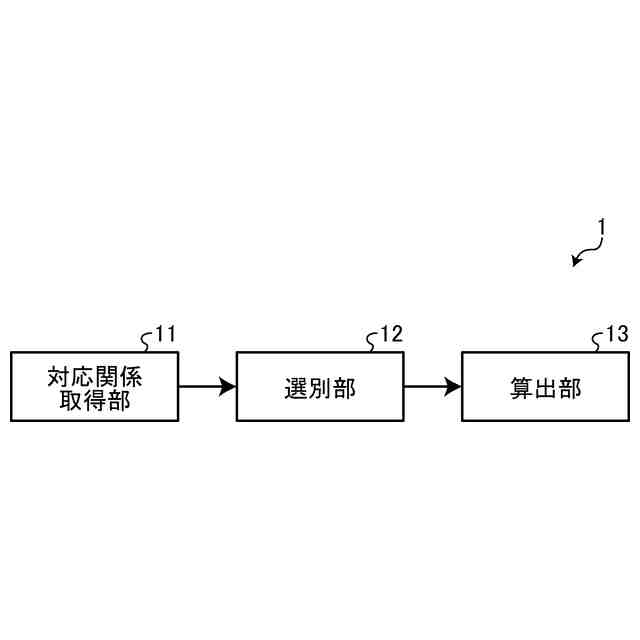
【解決手段】実施形態のプログラムは、コンピュータを、対応関係取得部と選別部と算出部として機能させる。対応関係取得部は、カメラにより撮像された複数の画像から複数の画像特徴を算出し、前記複数の画像特徴の対応関係を取得する。選別部は、複数の前記対応関係を、対応関係の有効性と、前記有効性が有効性閾値よりも低い対応関係が削除される場合に前記複数の画像のうち少なくともいずれか1つの画像に及ぼす影響と、に基づいて選別する。算出部は、前記複数の対応関係から選別された対応関係から、前記カメラの位置姿勢、及び、前記画像特徴の3次元情報の少なくとも一方を算出する。
【選択図】図1
特許請求の範囲
【請求項1】
コンピュータを、
カメラにより撮像された複数の画像から複数の画像特徴を算出し、前記複数の画像特徴の対応関係を取得する対応関係取得部と、
複数の前記対応関係を、対応関係の有効性と、前記有効性が有効性閾値よりも低い対応関係が削除される場合に前記複数の画像のうち少なくともいずれか1つの画像に及ぼす影響と、に基づいて選別する選別部と、
前記複数の対応関係から選別された対応関係から、前記カメラの位置姿勢、及び、前記画像特徴の3次元情報の少なくとも一方を算出する算出部、
として機能させるためのプログラム。
続きを表示(約 1,700 文字)
【請求項2】
前記コンピュータを、
前記カメラの撮影位置の初期値、及び、前記カメラの姿勢の初期値の少なくとも一方を取得する初期値取得部として更に機能させ、
前記算出部は、前記カメラの撮影位置の初期値、及び、前記カメラの姿勢の初期値の少なくとも一方に更に基づいて、前記カメラの位置姿勢、及び、前記画像特徴の3次元情報の少なくとも一方を算出する、
請求項1に記載のプログラム。
【請求項3】
前記対応関係の有効性は、前記対応関係にある2つの画像特徴が示す位置の間の移動量が、より大きいことであり、
前記有効性閾値は、所定の移動量を示し、
前記選別部は、前記対応関係にある2つの画像特徴が示す位置の間の移動量が、より大きい対応関係を削除しないように、前記複数の対応関係を選別する、
請求項1又は2に記載のプログラム。
【請求項4】
前記対応関係の有効性は、前記対応関係がある画像特徴を含む画像の数が、より多いことであり、
前記有効性閾値は、所定の画像数を示し、
前記選別部は、前記対応関係がある画像特徴を含む画像の数が、より多い対応関係を削除しないように、前記複数の対応関係を選別する、
請求項1又は2に記載のプログラム。
【請求項5】
前記対応関係の有効性は、前記対応関係にある画像特徴の類似度が、より高いことであり、
前記有効性閾値は、所定の類似度を示し、
前記選別部は、前記対応関係にある画像特徴の類似度が、より高い対応関係を削除しないように、前記複数の対応関係を選別する、
請求項1又は2に記載のプログラム。
【請求項6】
前記対応関係取得部は、前記対応関係の信頼度を算出するニューラルネットワークを用いて、前記信頼度を更に取得し、
前記対応関係の有効性は、前記信頼度が、より高いことであり、
前記有効性閾値は、所定の信頼度を示し、
前記選別部は、前記対応関係の信頼度が、より高い対応関係を削除しないように、前記複数の対応関係を選別する、
請求項1又は2に記載のプログラム。
【請求項7】
前記複数の画像のうち少なくともいずれか1つの画像に及ぼす影響は、前記画像毎に分布する画像特徴の位置のばらつきであり、
前記選別部は、前記有効性が前記有効性閾値よりも低い対応関係が削除される場合に、前記画像特徴の位置のばらつきを評価する評価値が、影響閾値よりも小さくならないように、前記複数の対応関係を選別する、
請求項1又は2に記載のプログラム。
【請求項8】
前記複数の画像のうち少なくともいずれか1つの画像に及ぼす影響は、前記複数の画像における前記対応関係の総数であり、
前記選別部は、前記有効性が前記有効性閾値よりも低い対応関係が削除される場合に、前記複数の画像における前記対応関係の総数が、影響閾値よりも小さくならないように、前記複数の対応関係を選別する、
請求項1又は2に記載のプログラム。
【請求項9】
前記選別部は、前記対応関係の総数が、所定の総数に近づくまで、前記有効性閾値を変化させ、前記有効性が前記有効性閾値よりも低い対応関係が削除される場合に、前記複数の画像における前記対応関係の総数が、前記影響閾値よりも小さくならないように、前記複数の対応関係を選別する、
請求項8に記載のプログラム。
【請求項10】
前記複数の画像のうち少なくともいずれか1つの画像に及ぼす影響は、前記画像毎に含まれる前記画像特徴の総数であり、
前記選別部は、前記有効性が前記有効性閾値よりも低い対応関係が削除される場合に、前記画像特徴の総数が、影響閾値よりも小さくならないように、前記複数の対応関係を選別する、
請求項1又は2に記載のプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態はプログラム、情報処理装置及び情報処理方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
カメラを用いて自己位置推定と、周辺環境の3次元計測とを同時に行う技術として、Simultaneous Localization and Mapping(SLAM)やStructure from Motion(SfM)が着目されている。カメラは屋内でも使えることや、比較的安価かつ手軽に使えることから、カメラを用いた技術の応用が期待されている。例えば、インフラの保守点検・巡視等における撮影位置・対象位置の計測、事故映像における自車の動き推定、及び、文化遺産の保護を目的とした文化財のデジタルアーカイブなどへの応用が挙げられる。
【先行技術文献】
【特許文献】
【0003】
特許第5953142号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では、カメラの位置姿勢、及び、画像特徴の3次元情報の少なくとも一方の算出に掛かる計算コストの削減を、精度を維持したまま行うことが難しかった。
【課題を解決するための手段】
【0005】
実施形態のプログラムは、コンピュータを、対応関係取得部と選別部と算出部として機能させる。対応関係取得部は、カメラにより撮像された複数の画像から複数の画像特徴を算出し、前記複数の画像特徴の対応関係を取得する。選別部は、複数の前記対応関係を、対応関係の有効性と、前記有効性が有効性閾値よりも低い対応関係が削除される場合に前記複数の画像のうち少なくともいずれか1つの画像に及ぼす影響と、に基づいて選別する。算出部は、前記複数の対応関係から選別された対応関係から、前記カメラの位置姿勢、及び、前記画像特徴の3次元情報の少なくとも一方を算出する。
【図面の簡単な説明】
【0006】
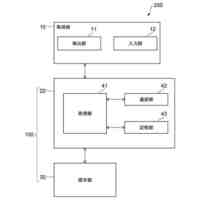
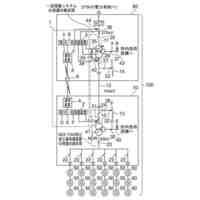
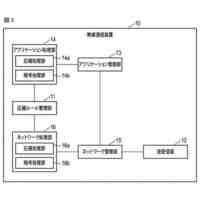
実施形態の情報処理装置の機能構成の例を示す図。
実施形態の画像特徴の移動量の例1を示す図。
実施形態の画像特徴の移動量の例2を示す図。
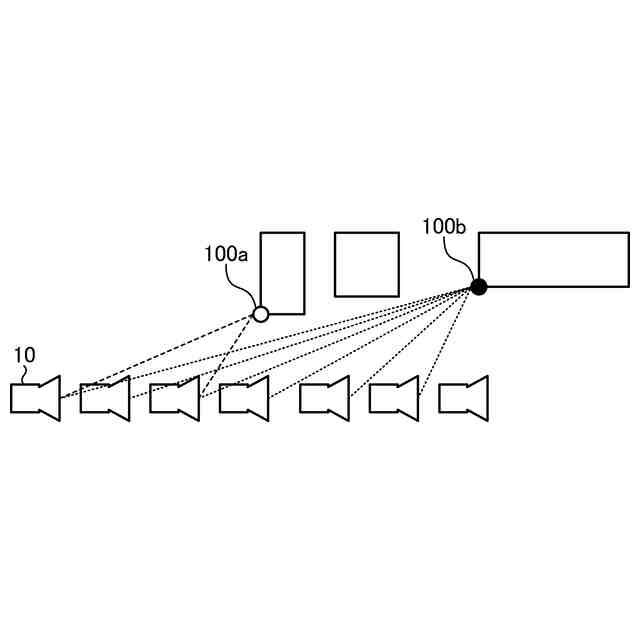
実施形態の対応関係にある画像特徴を含む画像の数を説明するための図。
実施形態の画像特徴の分布の例1を示す図。
実施形態の画像特徴の分布の例2を示す図。
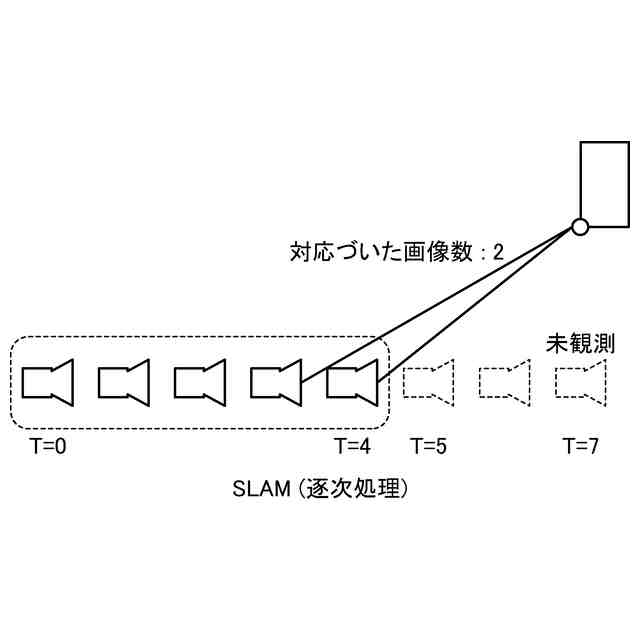
SLAMにおける画像特徴の対応付けについて説明するための図。
SfMにおける画像特徴の対応付けについて説明するための図。
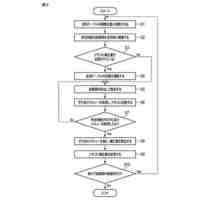
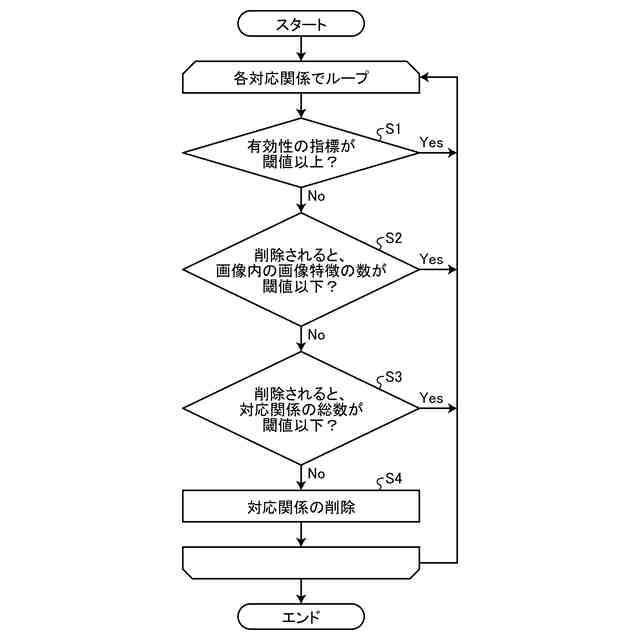
実施形態の選別部の処理例を示すフローチャート。
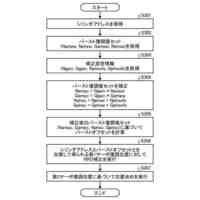
実施形態の変形例1の選別部の処理例を示すフローチャート。
実施形態の変形例2の情報処理装置の機能構成の例を示す図。
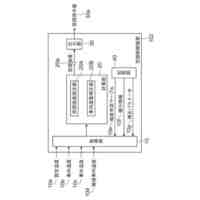
実施形態の情報処理装置のハードウェア構成の例を示す図。
【発明を実施するための形態】
【0007】
以下に添付図面を参照して、プログラム、情報処理装置及び情報処理方法の実施形態を詳細に説明する。
【0008】
はじめに、SLAMとSfMとの違いについて説明する。一般的にSLAMは、自動運転等のリアルタイム処理が必要なアプリケーションに用いられ、連続した画像シーケンスを入力として逐次的に位置推定等を行う。処理精度よりも処理速度を重視するため、カメラの位置姿勢、及び、カメラの周辺環境の最適化の実行時に範囲を絞る等の工夫が施されている。
【0009】
一方、SfMはオフライン処理を前提としており、入力は連続した画像シーケンスに限定されず画像群すべてを使い、精度を重視した最適化が行われる。
【0010】
保守点検・巡視等における撮影位置・対象位置の計測や、事故映像における自車の動き推定等での活用には、リアルタイム処理を必要としないので精度を重視したSfMが適している。一方で、画像群すべてを使うSfMでも処理時間を高速化することで、サーバーの使用料の削減やアプリケーションを使うユーザーの待ち時間軽減といった効果があり、SfMにおける高速化の技術が求められている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
弁
22日前
株式会社東芝
センサ
1か月前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
光スイッチ
1か月前
株式会社東芝
遠心送風機
1か月前
株式会社東芝
半導体装置
12日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
半導体装置
5日前
株式会社東芝
電力変換装置
21日前
株式会社東芝
ディスク装置
12日前
株式会社東芝
対策提示装置
1か月前
株式会社東芝
蓋の開閉装置
1か月前
株式会社東芝
空調制御装置
5日前
株式会社東芝
原子炉用制御棒
5日前
株式会社東芝
紙葉類処理装置
1か月前
株式会社東芝
電子計算機装置
1か月前
株式会社東芝
一括保護システム
5日前
株式会社東芝
磁気ディスク装置
1か月前
株式会社東芝
半導体モジュール
9日前
株式会社東芝
組電池及び電池盤
5日前
株式会社東芝
投込式水位伝送器
22日前
株式会社東芝
粒子線照射システム
9日前
株式会社東芝
植物栽培装置及び方法
9日前
株式会社東芝
無線通信装置及び方法
1か月前
株式会社東芝
変換回路及び通信装置
9日前
株式会社東芝
接続確認制御システム
20日前
株式会社東芝
締結装置および制御方法
1か月前
株式会社東芝
静止誘導電器の接続構造
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ