TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024177811
公報種別
公開特許公報(A)
公開日
2024-12-24
出願番号
2023096157
出願日
2023-06-12
発明の名称
締結装置および制御方法
出願人
株式会社東芝
,
東芝エネルギーシステムズ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B23P
19/06 20060101AFI20241217BHJP(工作機械;他に分類されない金属加工)
要約
【課題】ボルトの締結作業の負荷を低減する。
【解決手段】締結装置は、台車部とボルトテンショナとボルトテンショナ操作部と位置決め部と制御部とを備える。台車部は、駆動制御により移動可能である。ボルトテンショナは、操作部による操作によってボルトの締め動作を行う。位置決め部は、台車部に搭載され、ボルトテンショナと操作部を搭載し、ボルトテンショナの三次元位置を位置決めする。制御部は、ボルトとの距離が一定値以内となるように台車部を移動させ、台車部の移動後に、三次元位置がボルトを締める位置となるように位置決め部を動作させ、三次元位置がボルトを締める位置に位置決めされた後に、ボルトテンショナが締め動作を実行するように操作部を駆動させる。
【選択図】図1
特許請求の範囲
【請求項1】
駆動制御により移動可能な台車部と、
ボルトの締め動作を行うボルトテンショナと、
前記ボルトテンショナを駆動制御により操作する操作部と、
前記台車部に搭載され、前記ボルトテンショナと前記操作部を搭載し、前記ボルトテンショナの三次元位置を位置決めする位置決め部と、
前記ボルトとの距離が一定値以内となるように前記台車部を移動させ、前記台車部の移動後に、前記三次元位置が前記ボルトを締める位置となるように前記位置決め部を動作させ、前記三次元位置が前記ボルトを締める位置に位置決めされた後に、前記ボルトテンショナが前記締め動作を実行するように前記操作部を駆動させる制御部と、
を備える締結装置。
続きを表示(約 1,600 文字)
【請求項2】
前記台車部は、
前記台車部の前進、後退、旋回、および、円弧軌道に沿った移動を行う台車駆動部と、
前記ボルトテンショナの位置決めに応じた重心の移動方向に伸展可能なアウトリガーと、
を備える、
請求項1に記載の締結装置。
【請求項3】
自己位置および障害物の少なくとも一方を示す第1検出情報を検出するための第1検出部と、
前記ボルトの位置を検出するための第2検出部と、をさらに備え、
前記制御部は、前記第1検出情報および前記ボルトの位置を用いて前記台車駆動部を制御することにより、前記ボルトからの距離が一定値以内となるように前記台車部を移動させる、
請求項2に記載の締結装置。
【請求項4】
前記位置決め部は、
前記ボルトテンショナを第1方向に移動させる3自由度以上の第1駆動部と、
前記ボルトテンショナを前記第1方向に直交する第2方向に移動させる第2駆動部と、
を備える、
請求項1に記載の締結装置。
【請求項5】
前記制御部は、
前記ボルトテンショナが前記ボルトより高い位置となる状態で、前記ボルトからの距離が一定値以内となる位置まで前記台車部を移動させ、
前記ボルトテンショナが前記ボルトの上方の位置まで移動するように前記第1駆動部を駆動させ、
前記ボルトテンショナが前記ボルトの上方に位置した後、前記ボルトテンショナが前記ボルトに接触するまで移動するように前記第2駆動部を駆動させる、
請求項4に記載の締結装置。
【請求項6】
前記ボルトテンショナは、
前記ボルトに取り付けるメネジ部と、
前記メネジ部を回転させるメネジ回転部と、
前記ボルトを締めるナットを回転させるナット回転部と、を備え、
前記操作部は、
前記メネジ回転部を回転させるレンチを駆動制御するメネジ回転駆動部と、
前記ナット回転部を回転させるレンチを駆動制御するナット回転駆動部と、を備える、
請求項1に記載の締結装置。
【請求項7】
前記操作部は、前記ボルトの画像を撮像するための撮像部をさらに備え、
前記制御部は、
前記台車部の移動後に、前記撮像部により前記ボルトの画像が撮像される位置まで前記位置決め部を移動させ、
前記位置決め部の移動後に、撮像された前記画像を用いた駆動制御により、前記三次元位置が前記ボルトを締める位置となるように前記位置決め部を動作させる、
請求項6に記載の締結装置。
【請求項8】
前記制御部は、
回転により前記ボルトに取り付けられる前記メネジ部の前記ボルトのネジピッチに対応した移動量に応じて、前記ボルトテンショナが下降するように前記位置決め部を動作させ、
前記メネジ回転駆動部によるトルクが目標値に達したか否か、または、前記メネジ回転駆動部を駆動する電流の変化により、前記三次元位置が前記ボルトを締める位置となったことを検出する、
請求項6に記載の締結装置。
【請求項9】
前記制御部は、
前記ナット回転駆動部によるトルクが目標値に達したか否か、または、前記ナット回転駆動部を駆動する電流の変化により、前記ボルトテンショナに前記締め動作を終了するか否かを検出する、
請求項6に記載の締結装置。
【請求項10】
前記操作部は、前記メネジ回転駆動部および前記ナット回転駆動部のうち少なくとも一方による回転量を示す第2検出情報を検出する第3検出部をさらに備え、
前記制御部は、前記第2検出情報を記憶装置に記憶させる、
請求項6に記載の締結装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、締結装置および制御方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
風力発電設備の構造物である風車タワーのフランジ部を締結するボルト(締結ボルト)は、定期点検指針(例えば、JEAG5005)に定められた周期(例えば1年)で、緩みの確認、および、軸力または締付けトルクが適切であるかの増し締め点検作業が必要とされている。現在は、主に人手による点検作業が実施されているが、高所での危険を伴う重労働作業であること、作業コストが高いこと、および、今後の人手不足の懸念などが考慮され、ボルトの点検作業(締結作業)の自動化が望まれている。
【先行技術文献】
【特許文献】
【0003】
特許第5650171号公報
欧州特許第3550139号明細書
欧州特許第3934843号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、ボルトの締結作業の負荷を低減することができる締結装置および制御方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
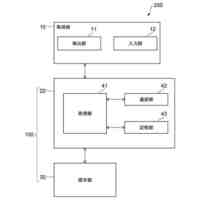
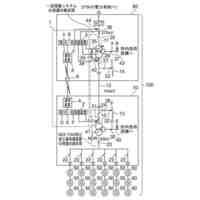
実施形態の締結装置は、台車部とボルトテンショナと操作部と位置決め部と制御部とを備える。台車部は、駆動制御により移動可能である。ボルトテンショナは、ボルトの締め動作を行う。操作部は、ボルトテンショナを駆動制御により操作する。位置決め部は、台車部に搭載され、ボルトテンショナと操作部を搭載し、ボルトテンショナの三次元位置を位置決めする。制御部は、ボルトとの距離が一定値以内となるように台車部を移動させ、台車部の移動後に、三次元位置がボルトを締める位置となるように位置決め部を動作させ、三次元位置がボルトを締める位置に位置決めされた後に、ボルトテンショナが締め動作を実行するように操作部を駆動させる。
【図面の簡単な説明】
【0006】
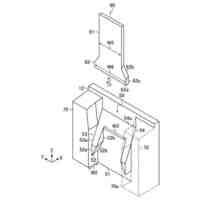
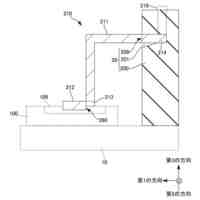
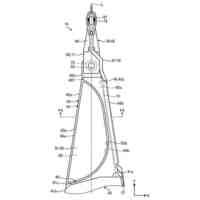
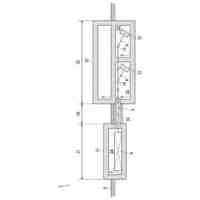
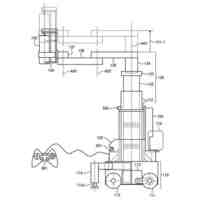
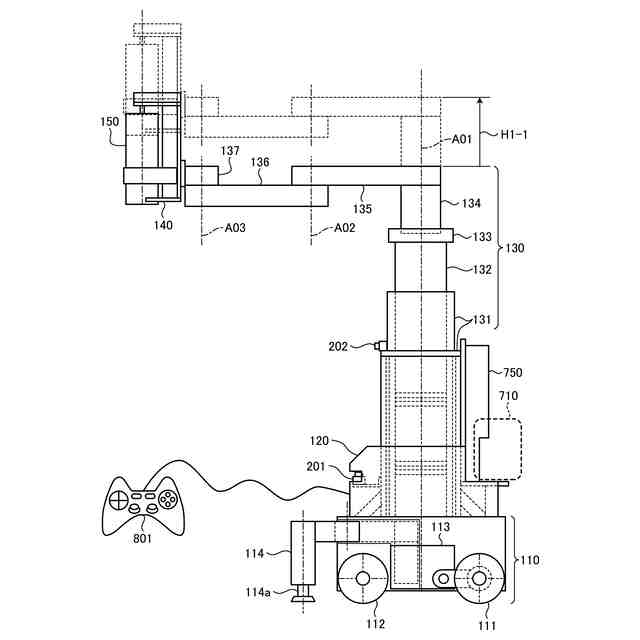
実施形態にかかる締結装置の側面図。
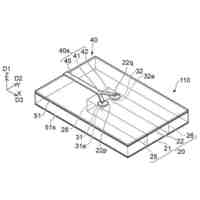
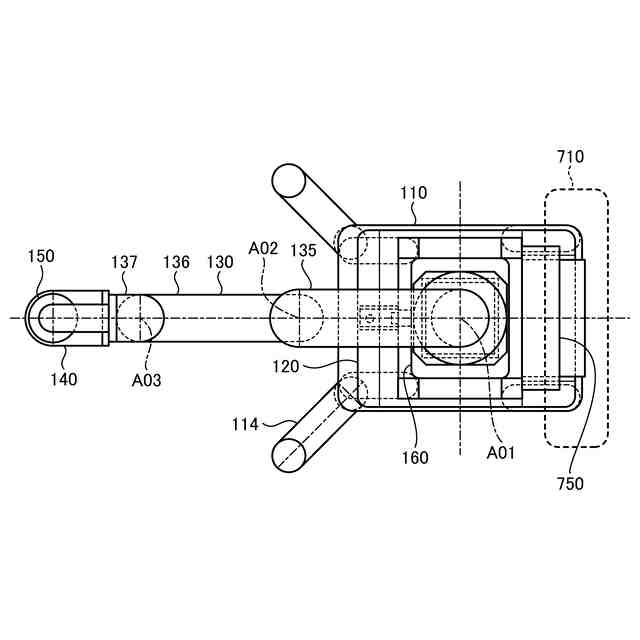
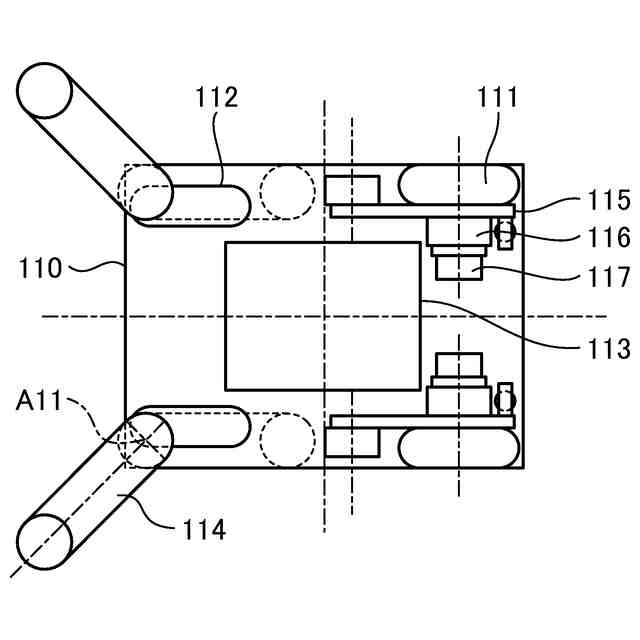
実施形態にかかる締結装置の上面図。
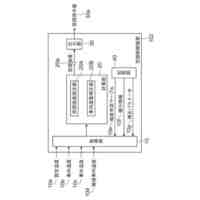
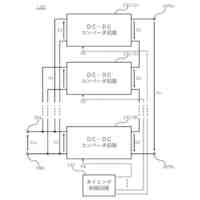
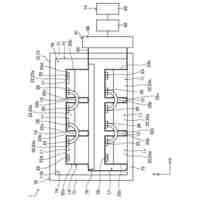
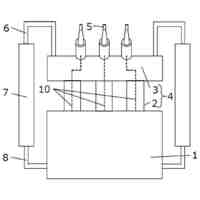
油圧供給部の構成例を示す図。
台車部の構成例を示す図。
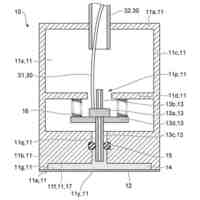
ハンドリング部の側面図。
ハンドリング部の上面図。
油圧供給部の上面図。
油圧供給部の側面図。
油圧供給部の上面図。
油圧供給部の側面図。
油圧供給部の例を示す図。
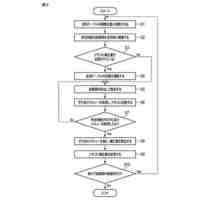
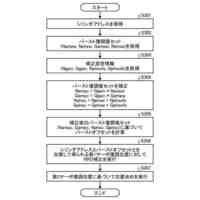
実施形態におけるアクセス処理のフローチャート。
アクセス処理の具体例を説明するための図。
マーカの設置例を示す図。
ボルトテンショナを移動させる処理の例を説明するための図。
ボルトテンショナを位置決めする処理の例を説明するための図。
ボルトテンショナを位置決めする処理の例を説明するための図。
ボルトテンショナを位置決めする処理の例を説明するための図。
ボルトテンショナを位置決めする処理の例を説明するための図。
実施形態における点検処理のフローチャート。
【発明を実施するための形態】
【0007】
以下に添付図面を参照して、この発明にかかる締結装置の好適な実施形態を詳細に説明する。以下では、風車タワーのフランジ部の締結に用いられるボルトの締結作業を例に説明するが、適用可能な設備は風車タワーに限られず、その他のどのような設備であってもよい。
【0008】
風車タワーは、例えば、複数の円筒状の構造物に設けられたフランジ部をボルトにより締結した構造となっている。ボルトの締結作業のために、複数のフランジ部に対応する複数のフロアが設けられ、複数のフロア間の移動手段として、昇降機が設置される。
【0009】
ボルトの締結作業の自動化には、例えば、以下の(P1)~(P4)に記載するような技術課題がある。
【0010】
(P1)サイズおよび重量の制約:ボルトの締結作業に用いる締結装置は、フロア間の移動のための昇降機に搭載可能なサイズ(幅、高さ、奥行き)および重量である必要がある。例えば、人(以下、点検者という)による点検作業を前提とする場合、最大で成人2名が搭乗できる程度の昇降機が用いられる。このような昇降機を利用する場合、締結装置は、成人2名分のサイズおよび重量の範囲内とする必要がある。
(P2)フロア上での移動:締結装置は、点検者が簡単な初期セッティングを行った後は、点検者による作業なしで点検対象となる1つ以上のボルト(以下、対象ボルト)まで順次移動できることが必要となる。移動時には、締結装置は、フロア上の障害物等を回避して対象ボルトにアクセスできる位置まで移動する必要がある。
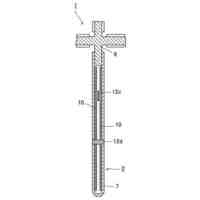
(P3)ボルトテンショナの位置決め:ボルトテンショナは、対象ボルトの増し締め点検に用いられる工具であり、例えば10kg以上の重量物である。また、ボルトテンショナは、点検時に必要な軸力を対象ボルトに掛けるために高圧の油圧供給が必要となる。対象ボルトの近くまで移動した後、締結装置は、重い工具であるボルトテンショナを、対象ボルトを増し締め可能な位置まで精度よく位置決めする必要がある。
(P4)ボルトテンショナの操作:点検者が操作することを前提とするボルトテンショナを、締結装置がハンドリング(操作)する必要がある。例えば締結装置は、対象ボルトに対して位置決めしたボルトテンショナを対象ボルトに取り付ける操作、取り付けたボルトテンショナによる対象ボルトの締結を行う必要がある。また、締結装置は、油圧供給に用いられる油圧ポンプを操作する必要がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
弁
21日前
株式会社東芝
センサ
1か月前
株式会社東芝
半導体装置
11日前
株式会社東芝
遠心送風機
1か月前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
光スイッチ
1か月前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
空調制御装置
4日前
株式会社東芝
対策提示装置
1か月前
株式会社東芝
電力変換装置
20日前
株式会社東芝
ディスク装置
11日前
株式会社東芝
電子計算機装置
1か月前
株式会社東芝
原子炉用制御棒
4日前
株式会社東芝
紙葉類処理装置
1か月前
株式会社東芝
一括保護システム
4日前
株式会社東芝
半導体モジュール
8日前
株式会社東芝
投込式水位伝送器
21日前
株式会社東芝
磁気ディスク装置
1か月前
株式会社東芝
組電池及び電池盤
4日前
株式会社東芝
粒子線照射システム
8日前
株式会社東芝
変換回路及び通信装置
8日前
株式会社東芝
植物栽培装置及び方法
8日前
株式会社東芝
接続確認制御システム
19日前
株式会社東芝
無線通信装置及び方法
1か月前
株式会社東芝
ケーブル脱落防止バンド
1か月前
株式会社東芝
締結装置および制御方法
1か月前
株式会社東芝
静止誘導電器の接続構造
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ