TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024176417
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023094930
出願日
2023-06-08
発明の名称
磁気ディスク装置
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G11B
5/596 20060101AFI20241212BHJP(情報記憶)
要約
【課題】ライト動作中における目標トラックと磁気ヘッドの位置との誤差を抑制できる磁気ディスク装置を提供すること。
【解決手段】磁気ディスク装置のコントローラは、磁気ヘッドの位置決めをしながらデータ領域へのライトを行う第1動作において、下記のように動作する。即ち、コントローラは、バーストパターンを復調して第1バースト復調値を取得し、第1設定値を引数として使用する補正アルゴリズムに基づき第1バースト復調値を補正する。そして、コントローラは、補正された第1バースト復調値に基づき複数のサーボトラックのうちの一からの磁気ヘッドのサーボトラックからのオフセット量を計算する。
【選択図】図10
特許請求の範囲
【請求項1】
複数のサーボトラックを備え、前記複数のサーボトラック上にはそれぞれはバーストパターンを含んだサーボデータが記録された複数のサーボセクタが円周方向に間隔を空けて配置され、円周方向に並ぶサーボセクタの間にはデータがライトされるデータ領域が配置された、磁気ディスクと、
前記磁気ディスクに対してライトおよびリードを実行する磁気ヘッドと、
第1設定値が格納されたメモリと、
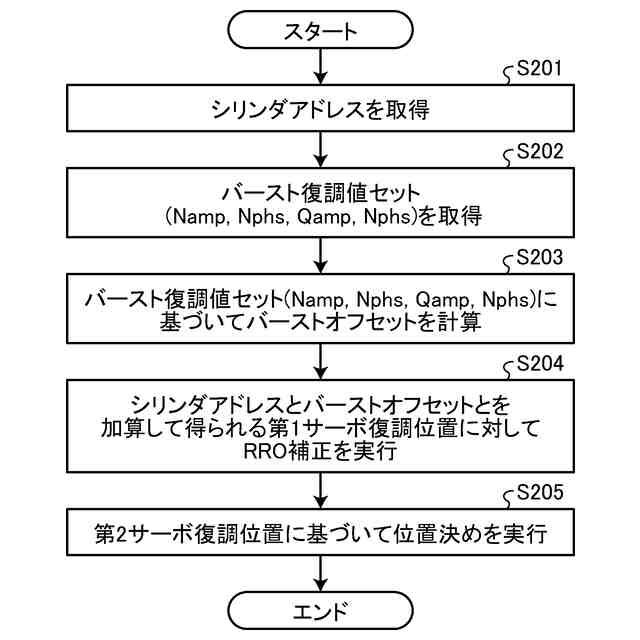
前記磁気ヘッドの位置決めをしながら前記データ領域へのライトを行う第1動作においては、前記バーストパターンを復調して第1バースト復調値を取得し、前記第1設定値を引数として使用する補正アルゴリズムに基づき前記第1バースト復調値を補正し、補正された前記第1バースト復調値である第2バースト復調値に基づき前記複数のサーボトラックのうちの一からの前記磁気ヘッドの前記サーボトラックからのオフセット量を計算する、コントローラと、
を備える磁気ディスク装置。
続きを表示(約 1,400 文字)
【請求項2】
前記コントローラは、前記磁気ヘッドの位置決めをするが前記データ領域へのライトを行わない第2動作においては、前記バーストパターンを復調して第3バースト復調値を取得し、前記第3バースト復調値に基づき前記複数のサーボトラックのうちの一からの前記磁気ヘッドの前記サーボトラックからのオフセット量を計算する、
請求項1に記載の磁気ディスク装置。
【請求項3】
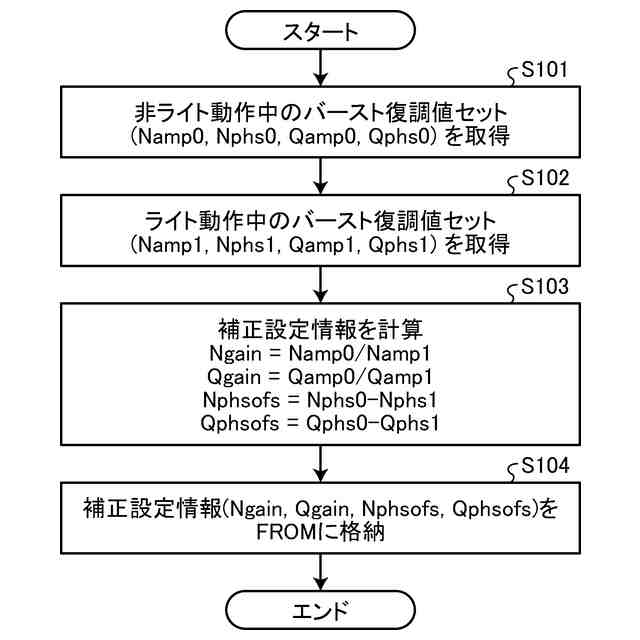
前記コントローラは、前記データ領域へのライトを行わないで前記磁気ヘッドの位置決めを試行しながら前記バーストパターンを復調して第4バースト復調値を取得し、前記データ領域へのライトを行いながら前記磁気ヘッドの位置決めを試行しながら前記バーストパターンを復調して第5バースト復調値を取得し、前記第4バースト復調値と前記第5バースト復調値とに基づき前記第1設定値を計算し、前記第1設定値を前記メモリに格納する、
請求項1または請求項2に記載の磁気ディスク装置。
【請求項4】
前記第1バースト復調値、前記第4バースト復調値、および前記第5バースト復調値のそれぞれは、前記バーストパターンの復調信号の振幅および位相を含み、
前記第1設定値は、振幅比または位相差であり、
前記振幅比は、前記第4バースト復調値に含まれる振幅と前記第5バースト復調値に含まれる振幅との比であり、
前記位相差は、前記第4バースト復調値に含まれる位相と前記第5バースト復調値に含まれる位相との差であり、
前記補正アルゴリズムは、前記第1設定値に基づき前記第1バースト復調値に含まれる振幅または位相を補正するアルゴリズムである、
請求項3に記載の磁気ディスク装置。
【請求項5】
前記第1バースト復調値は、前記バーストパターンの復調信号の振幅および位相を含み、
前記第1設定値は、前記振幅に乗算される設定値または前記位相に加算または減算される設定値を含み、
前記補正アルゴリズムは、前記第1設定値に基づき前記振幅または前記位相を補正するアルゴリズムである、
請求項1に記載の磁気ディスク装置。
【請求項6】
前記サーボデータは、RRO(Repeatable RunOut)を補正する補正データを持つポストコードをさらに含み、前記RROを補正する補正データは前記データ領域へのライトを行わないで前記磁気ヘッドの位置決めを測定したデータに基づいて計算されたRRO補正量であり、
前記コントローラは、前記磁気ヘッドの位置決めにおいて、前記ポストコードより取得した前記RRO補正データに基づくヘッド位置決め補正をさらに実行する、
請求項1に記載の磁気ディスク装置。
【請求項7】
前記コントローラは、前記複数のサーボセクタのそれぞれについて前記第1設定値を計算し、前記メモリに格納する、
請求項3に記載の磁気ディスク装置。
【請求項8】
前記コントローラは、前記複数のサーボセクタのうちの2以上のサーボセクタ毎に、または前記複数のサーボトラックのうちの2以上のサーボトラック毎に、複数の前記第1設定値を計算し、前記複数の第1設定の平均値を、前記メモリに格納する、
請求項3に記載の磁気ディスク装置。
発明の詳細な説明
【技術分野】
【0001】
本実施形態は、磁気ディスク装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、磁気ディスク装置は、磁気ディスクに記録されたサーボデータに基づき、磁気ヘッドの位置決めを行う。磁気ディスクには、複数のトラックが設けられている。磁気ディスク装置は、ライト動作やリード動作においては、磁気ヘッドを目標トラックに位置決めする。
【先行技術文献】
【特許文献】
【0003】
米国特許第9564157号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
一つの実施形態は、ライト動作中における目標トラックと磁気ヘッドの位置との誤差を抑制できる磁気ディスク装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
一つの実施形態によれば、磁気ディスク装置は、磁気ディスクと、磁気ヘッドと、メモリと、コントローラと、を備える。磁気ディスクは、複数のサーボトラックを備え、複数のサーボトラック上にはそれぞれはバーストパターンを含んだサーボデータが記録された複数のサーボセクタが円周方向に間隔を空けて配置される。円周方向に並ぶサーボセクタの間にはデータがライトされるデータ領域が配置される。磁気ヘッドは、磁気ディスクに対してライトおよびリードを実行する。メモリには第1設定値が格納される。コントローラは、磁気ヘッドの位置決めをしながらデータ領域へのライトを行う第1動作においては、下記のように動作する。即ち、コントローラは、バーストパターンを復調して第1バースト復調値を取得し、第1設定値を引数として使用する補正アルゴリズムに基づき第1バースト復調値を補正する。そして、コントローラは、補正された第1バースト復調値である第2バースト復調値に基づき複数のサーボトラックのうちの一からの磁気ヘッドのサーボトラックからのオフセット量を計算する。
【図面の簡単な説明】
【0006】
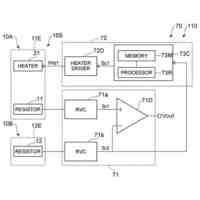
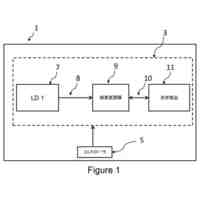
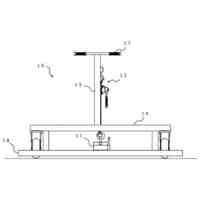
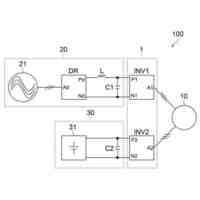
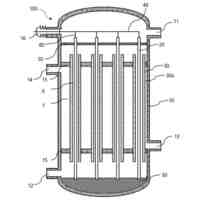
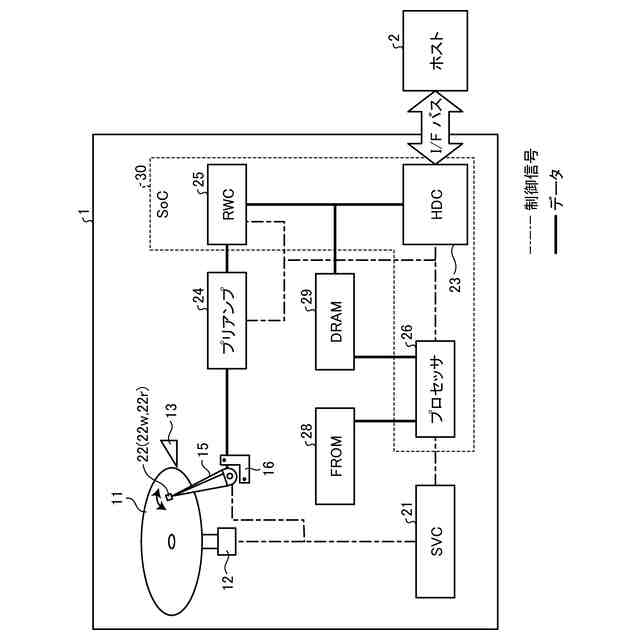
図1は、実施形態の磁気ディスク装置の構成の一例を示す模式的な図である。
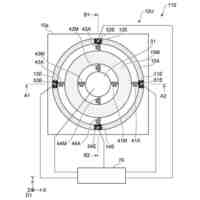
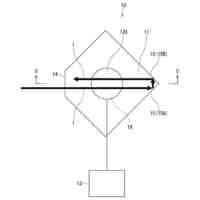
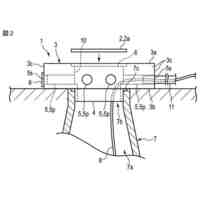
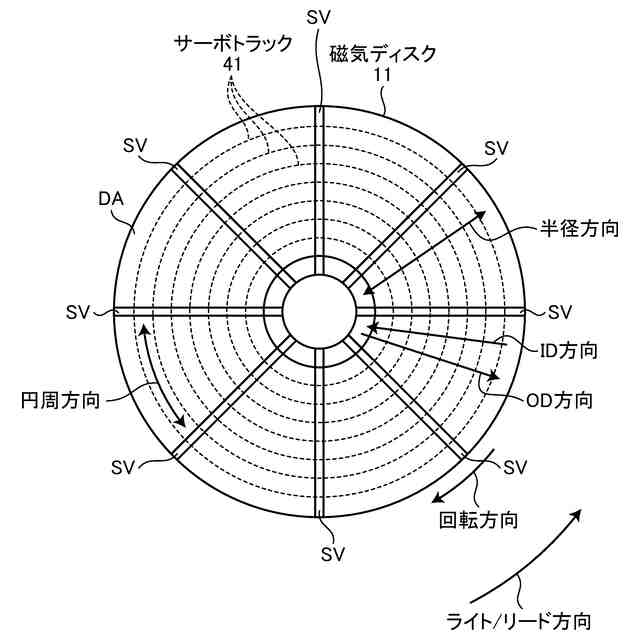
図2は、実施形態の磁気ディスクの構成の一例を示す模式的な図である。
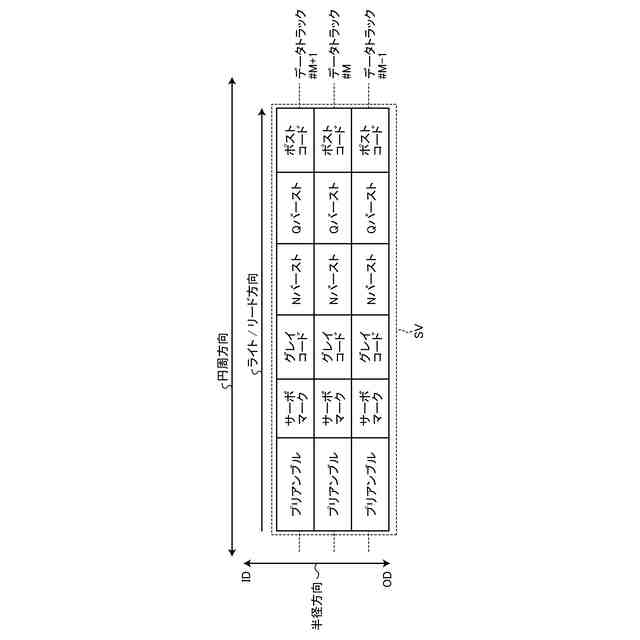
図3は、実施形態のサーボセクタに記録されたサーボデータの一例を示す図である。
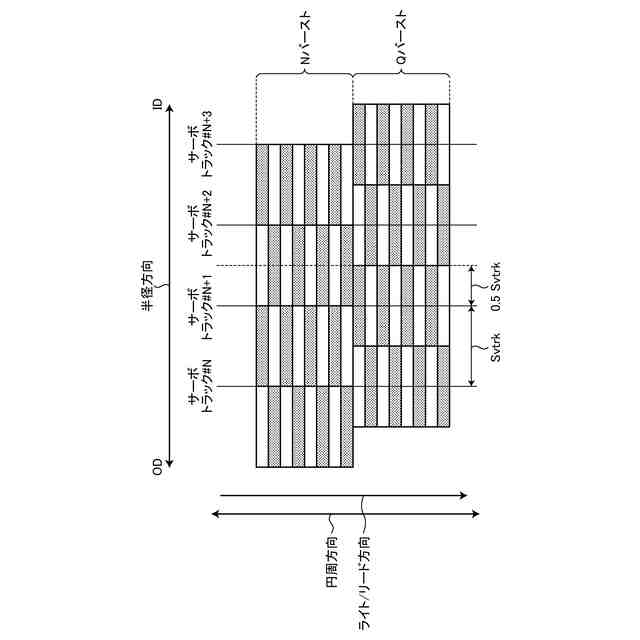
図4は、実施形態のサーボセクタに記録されたNバーストおよびQバーストの構成の一例を示す模式的な図である。
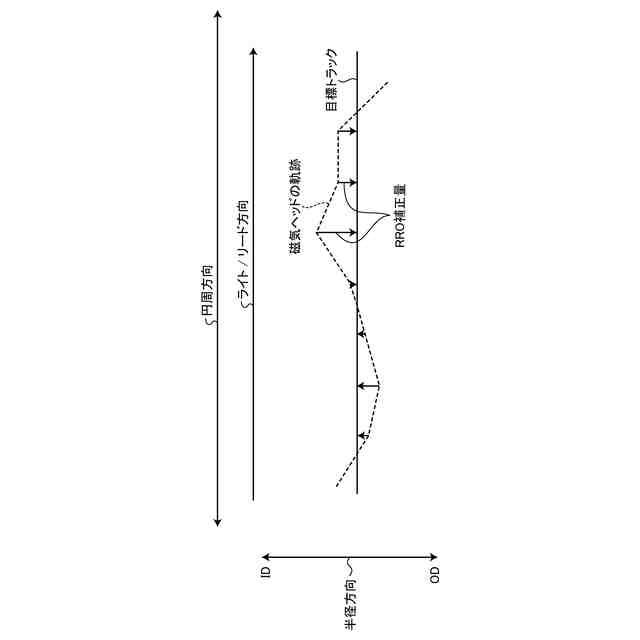
図5は、RRO補正量の学習方法の一例を説明するための図である。
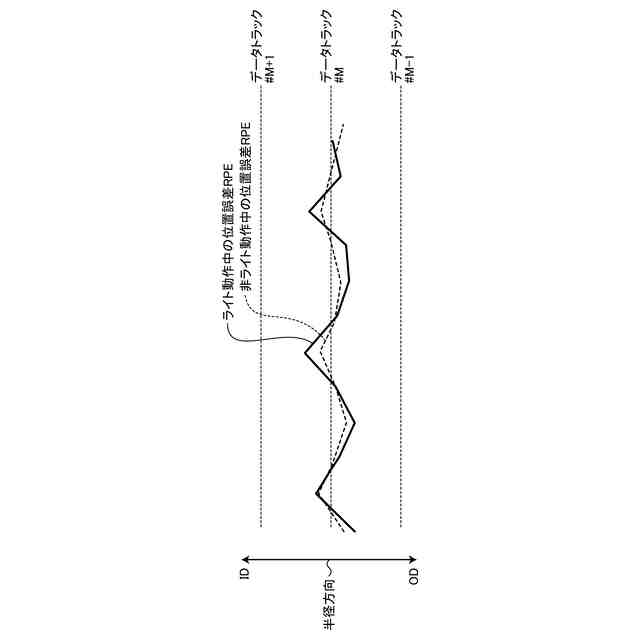
図6は、ライト動作中と非ライト動作中とのそれぞれにおいて観測される位置誤差の一例を示す図である。
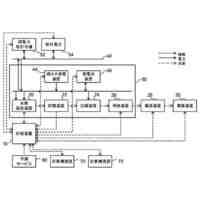
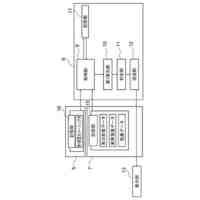
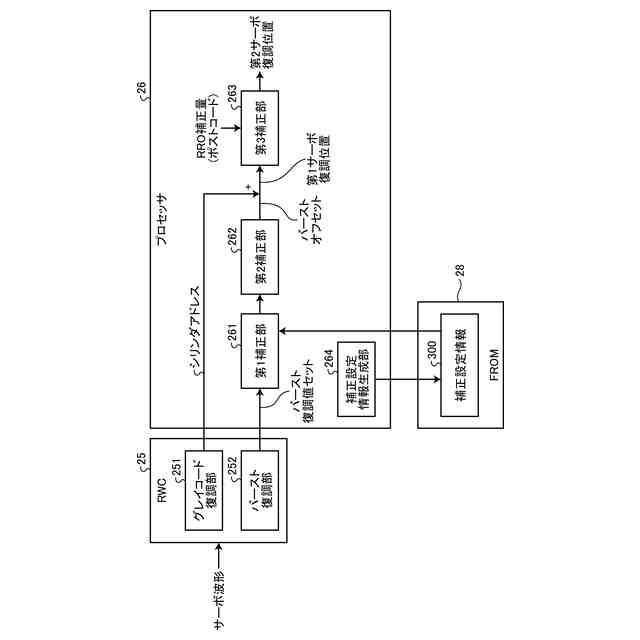
図7は、実施形態の磁気ディスク装置の位置決め制御に関する機能構成の一例を示す模式的な図である。
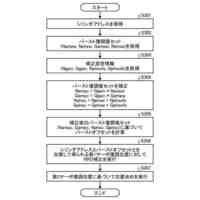
図8は、実施形態の補正設定情報の生成の動作の一例を示すフローチャートである。
図9は、非ライト動作中における位置決めの動作の一例を示すフローチャートである。
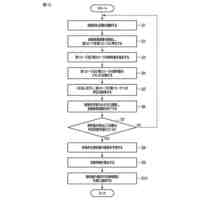
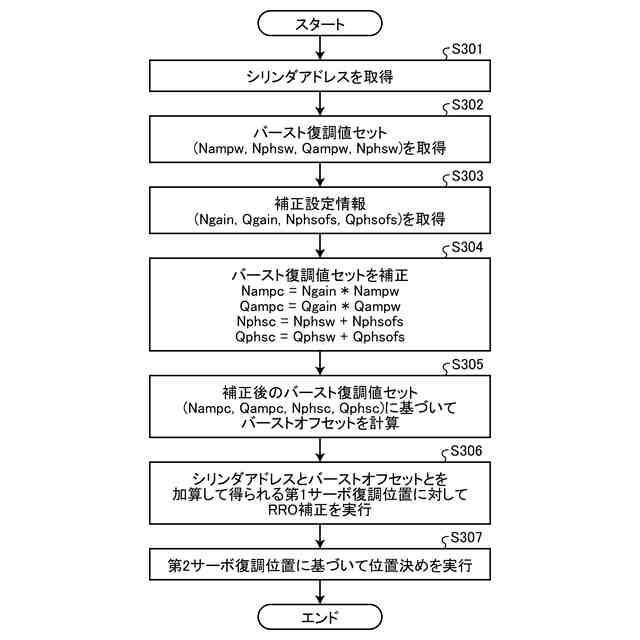
図10は、ライト動作中における位置決めの動作の一例を示すフローチャートである。
図11は、非ライト動作中のバースト復調値セットのうちの、Nバーストの復調信号の振幅と、Qバーストの復調信号の振幅と、の一例を示す図である。
図12は、非ライト動作中のバースト復調値セットのうちの、Nバーストの復調信号の位相と、Qバーストの復調信号の位相と、の一例を示す図である。
図13は、ライト動作中のバースト復調値セットのうちの、Nバーストの復調信号の振幅と、Qバーストの復調信号の振幅と、の一例を示す図である。
図14は、ライト動作中のバースト復調値セットのうちの、Nバーストの復調信号の位相と、Qバーストの復調信号の位相と、の一例を示す図である。
図15は、非ライト動作中のバースト復調値セットから計算された初期位相補正後のバーストデータと、ライト動作中のバースト復調値セットから補正設定情報を用いた補正無しに計算された初期位相補正後のバーストデータと、を2次元平面にプロットしたグラフである。
図16は、補正設定情報のうちの振幅比の一例を示す図である。
図17は、補正設定情報のうちの位相差の一例を示す図である。
図18は、非ライト動作中のバースト復調値セットから計算された第2サーボ復調位置とライト動作中のバースト復調値セットから補正設定情報を用いた補正無しに計算された第2サーボ復調位置との差を或るサーボトラック上の複数のサーボセクタSVで観測した一例を示す図である。
図19は、非ライト動作中のバースト復調値セットから計算された第2サーボ復調位置とライト動作中のバースト復調値セットから補正設定情報を用いた補正を行って計算された第2サーボ復調位置との差を或るサーボトラック上の複数のサーボセクタSVで観測した一例を示す図である。
図20は、非ライト動作中のバースト復調値セットから計算された第2サーボ復調位置とライト動作中のバースト復調値セットから振幅のみ補正して計算された第2サーボ復調位置との差を或るサーボトラック上の複数のサーボセクタSVで観測した一例を示す図である。
【発明を実施するための形態】
【0007】
以下に添付図面を参照して、実施形態にかかる磁気ディスク装置を詳細に説明する。なお、この実施形態により本発明が限定されるものではない。
【0008】
(実施形態)
図1は、実施形態の磁気ディスク装置1の構成の一例を示す模式的な図である。
【0009】
磁気ディスク装置1は、ホスト2に接続される。磁気ディスク装置1は、ホスト2から、ライトコマンドやリードコマンドなどの、アクセスコマンドを受信することができる。
【0010】
磁気ディスク装置1は、表面に磁性層が形成された磁気ディスク11を備える。磁気ディスク装置1は、アクセスコマンドに応じて磁気ディスク11に対するアクセスを行う。アクセスは、データのライトとデータのリードとを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
台車
21日前
株式会社東芝
センサ
今日
株式会社東芝
固定子
20日前
株式会社東芝
センサ
7日前
株式会社東芝
計画装置
1か月前
株式会社東芝
回転電機
21日前
株式会社東芝
搬送装置
21日前
株式会社東芝
開閉装置
14日前
株式会社東芝
除去装置
1か月前
株式会社東芝
光スイッチ
今日
株式会社東芝
直流遮断器
21日前
株式会社東芝
光デバイス
28日前
株式会社東芝
真空バルブ
1か月前
株式会社東芝
蓋の開閉装置
2日前
株式会社東芝
電力変換装置
14日前
株式会社東芝
駆動システム
27日前
株式会社東芝
駅務システム
1か月前
株式会社東芝
静電保護回路
2か月前
株式会社東芝
電力変換装置
1か月前
株式会社東芝
合成ユニット
2か月前
株式会社東芝
靴用絶縁カバー
2か月前
株式会社東芝
電気車制御装置
14日前
株式会社東芝
潤滑油供給装置
14日前
株式会社東芝
有価物回収方法
14日前
株式会社東芝
レーザ溶接方法
2か月前
株式会社東芝
オゾン発生装置
1か月前
株式会社東芝
開閉器駆動装置
1か月前
株式会社東芝
電動機制御装置
21日前
株式会社東芝
磁気ディスク装置
今日
株式会社東芝
画像取得システム
14日前
株式会社東芝
埋込磁石型モータ
2か月前
株式会社東芝
地中箱用アダプタ
28日前
株式会社東芝
液体の貯蔵タンク
1か月前
株式会社東芝
積雪検出システム
22日前
株式会社東芝
ガス絶縁開閉装置
1か月前
株式会社東芝
系統安定化システム
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ