TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024176814
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023095628
出願日
2023-06-09
発明の名称
警報システム、移動局、及びプログラム
出願人
株式会社村田製作所
代理人
個人
,
個人
主分類
G01S
5/02 20100101AFI20241212BHJP(測定;試験)
要約
【課題】人又は物が予め決められたエリアにあるか否かを高精度に決定する。
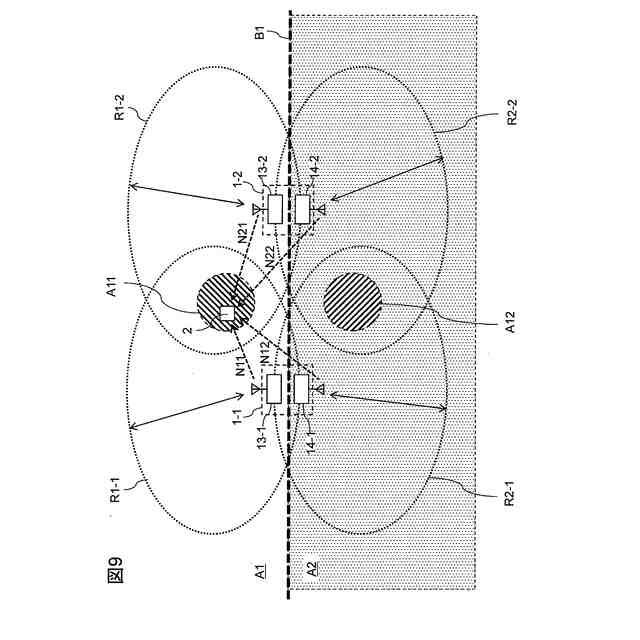
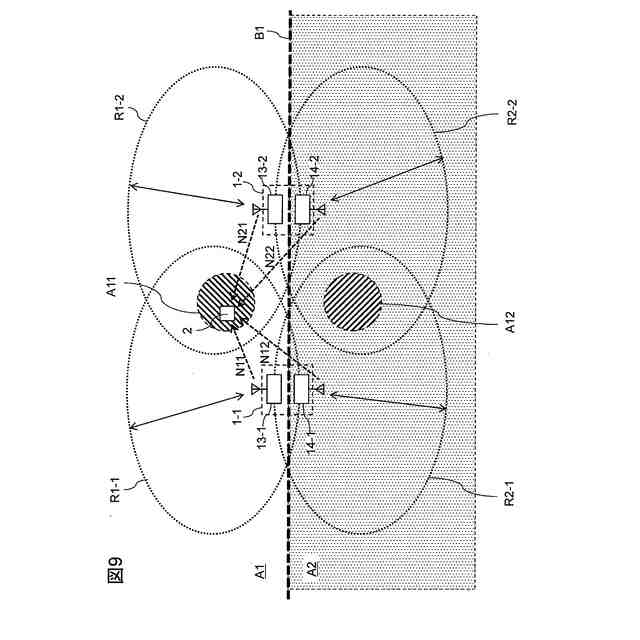
【解決手段】処理回路24は、ビーコン信号N11,N12の信号レベルに基づいて、第1の固定局1を基準として移動局2が境界線B1のいずれの側に位置しているかを暫定的に示す第1の暫定位置を決定する。処理回路24は、ビーコン信号N21,N22の信号レベルに基づいて、第2の固定局1を基準として移動局2が境界線B1のいずれの側に位置しているかを暫定的に示す第2の暫定位置を決定する。処理回路24は、第1及び第2の暫定位置に基づいて、移動局2が安全エリアA1及び危険エリアA2のいずれにあるかを決定する。
【選択図】図9
特許請求の範囲
【請求項1】
第1の固定局、第2の固定局、及び移動局を含む警報システムであって、
前記第1及び第2の固定局は、第1及び第2のエリアの境界線上における異なる位置にそれぞれ設けられ、
前記第1の固定局は、
前記境界線から前記第1のエリアの側に向かう第1の主ビーム方向を有する第1の送信アンテナと、
前記境界線から前記第2のエリアの側に向かう第2の主ビーム方向を有する第2の送信アンテナと、
前記第1の送信アンテナを介して第1のビーコン信号を送信し、前記第2の送信アンテナを介して第2のビーコン信号を送信する第1の送信回路とを備え、
前記第2の固定局は、
前記境界線から前記第1のエリアの側に向かう第3の主ビーム方向を有する第3の送信アンテナと、
前記境界線から前記第2のエリアの側に向かう第4の主ビーム方向を有する第4の送信アンテナと、
前記第3の送信アンテナを介して第3のビーコン信号を送信し、前記第4の送信アンテナを介して第4のビーコン信号を送信する第2の送信回路とを備え、
前記移動局は、
受信アンテナと、
前記受信アンテナを介して前記第1~第4のビーコン信号を受信し、前記第1~第4のビーコン信号の信号レベルを検出する受信回路と、
前記第1~第4のビーコン信号の信号レベルに基づいて、前記移動局が前記第1及び第2のエリアのいずれにあるかを決定する処理回路と、
前記移動局が前記第2のエリアにある場合、前記移動局が前記第2のエリアにあることを示す第1の警報信号を出力する出力装置とを備え、
前記処理回路は、
前記第1及び第2のビーコン信号の信号レベルに基づいて、前記第1の固定局を基準として前記移動局が前記境界線のいずれの側に位置しているかを暫定的に示す第1の暫定位置を決定し、
前記第3及び第4のビーコン信号の信号レベルに基づいて、前記第2の固定局を基準として前記移動局が前記境界線のいずれの側に位置しているかを暫定的に示す第2の暫定位置を決定し、
前記第1及び第2の暫定位置に基づいて、前記移動局が前記第1及び第2のエリアのいずれにあるかを決定する、
警報システム。
続きを表示(約 2,200 文字)
【請求項2】
前記処理回路は、
前記第1及び第2のビーコン信号の信号レベルに基づいて、前記移動局が、前記第1の固定局の位置において前記境界線に接する第1の基準線のいずれの側に位置しているかを決定することにより、前記第1の暫定位置を決定し、
前記第3及び第4のビーコン信号の信号レベルに基づいて、前記移動局が、前記第2の固定局の位置において前記境界線に接する第2の基準線のいずれの側に位置しているかを決定することにより、前記第2の暫定位置を決定する、
請求項1記載の警報システム。
【請求項3】
前記第1及び第2の基準線は、前記第1及び第2の固定局の位置を通る共通の直線である、
請求項2記載の警報システム。
【請求項4】
前記第1及び第2の基準線は、所定角度を有して互いに交差する、
請求項2記載の警報システム。
【請求項5】
前記処理回路は、
前記第2のビーコン信号の信号レベルが前記第1のビーコン信号の信号レベルより高い場合、前記移動局が前記境界線に対して前記第2のエリアを含む側に位置していることを示すように前記第1の暫定位置を決定し、
前記第4のビーコン信号の信号レベルが前記第3のビーコン信号の信号レベルより高い場合、前記移動局が前記境界線に対して前記第2のエリアを含む側に位置していることを示すように前記第2の暫定位置を決定する、
請求項1~4のうちの1つに記載の警報システム。
【請求項6】
前記処理回路は、
予め決められた時間期間中に、前記第2のビーコン信号の信号レベルが前記第1のビーコン信号の信号レベルを超過した回数が第1のしきい値を超えた場合、前記移動局が前記境界線に対して前記第2のエリアを含む側に位置していることを示すように前記第1の暫定位置を決定し、
前記時間期間中に、前記第4のビーコン信号の信号レベルが前記第3のビーコン信号の信号レベルを超過した回数が前記第1のしきい値を超えた場合、前記移動局が前記境界線に対して前記第2のエリアを含む側に位置していることを示すように前記第2の暫定位置を決定する、
請求項1~4のうちの1つに記載の警報システム。
【請求項7】
前記移動局は、前記移動局の加速度を検出する加速度センサをさらに備え、
前記処理回路は、
前記移動局の加速度に基づいて、前記移動局が移動中であるか否かを決定し、
前記移動局が移動中であり、かつ、前記第2のビーコン信号の信号レベルが前記第1のビーコン信号の信号レベルより高い場合、前記移動局が前記境界線に対して前記第2のエリアを含む側に位置していることを示すように前記第1の暫定位置を決定し、
前記移動局が移動中であり、かつ、前記第4のビーコン信号の信号レベルが前記第3のビーコン信号の信号レベルより高い場合、前記移動局が前記境界線に対して前記第2のエリアを含む側に位置していることを示すように前記第2の暫定位置を決定する、
請求項1~4のうちの1つに記載の警報システム。
【請求項8】
前記処理回路は、
前記第1及び第2のビーコン信号の信号レベルに基づいて、前記第1の基準線から前記移動局までの第1の距離を計算し、
前記第3及び第4のビーコン信号の信号レベルに基づいて、前記第2の基準線から前記移動局までの第2の距離を計算し、
前記第1及び第2の暫定位置と、前記第1又は第2の距離とに基づいて、前記移動局が、前記第1のエリアに含まれる第3のエリアであって、第2のしきい値よりも短い距離を有して前記第2のエリアに近接した第3のエリアにあるか否かを決定し、
前記出力装置は、前記移動局が前記第3のエリアにある場合、前記移動局が前記第3のエリアにあることを示す第2の警報信号を出力する、
請求項2~4のうちの1つに記載の警報システム。
【請求項9】
前記処理回路は、前記第1及び第2の暫定位置と、前記第1又は第2の距離とに基づいて、前記移動局が、前記第1のエリアに含まれる第4のエリアであって、前記第2のしきい値より短い第3のしきい値よりも短い距離を有して前記第2のエリアに近接した第4のエリアにあるか否かを決定し、
前記出力装置は、前記移動局が前記第4のエリアにある場合、前記第1の警報信号を出力する、
請求項8記載の警報システム。
【請求項10】
前記処理回路は、
前記第1及び第2のビーコン信号の信号レベルに基づいて第1の特徴量を計算し、
前記第1の特徴量に基づいて、第1の機械学習モデルを用いて、前記移動局が前記第1の基準線に対して前記第2のエリアを含む側に位置しているか否かを決定することにより、前記第1の暫定位置を決定し、
前記第3及び第4のビーコン信号の信号レベルに基づいて第2の特徴量を計算し、
前記第2の特徴量に基づいて、前記第1の機械学習モデルを用いて、前記移動局が前記第2の基準線に対して前記第2のエリアを含む側に位置しているか否かを決定することにより、前記第2の暫定位置を決定する、
請求項2~4のうちの1つに記載の警報システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、警報システム、移動局、及びプログラムに関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
例えば、工場において作業者が工作機械に不用意に近づくと、作業者が工作機械によって怪我をするおそれがある。このため、工作機械の近傍に危険エリアを設定し、作業者が危険エリアに進入したときに警報を発生することがある。
【0003】
例えば,特許文献1は、安全エリアと危険エリアとが存在する建設現場に適用される安全制御システムを開示している。特許文献1のシステムは、作業者及び重機などに設けられた発信源から送信されたビーコン信号の受信強度に基づいて、危険エリアと安全エリアとの境界からビーコン信号の発信源までの距離を検出する。
【先行技術文献】
【特許文献】
【0004】
特開2021-085185号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のようにビーコン信号の受信信号強度に基づいて距離を検出する場合、ビーコン信号の発信源から遠ざかると、安定的な信号強度でビーコン信号を受信することは困難になる。その結果、作業者が安全エリアにいるか、それとも危険エリアにいるのかを確実に判断できなくなる。作業者が安全エリアにいるか、それとも危険エリアにいるのかを確実に判断するために、1つの発信源でカバーする範囲が狭くなるように、多数の発信源を高密度で配置することが考えられる。しかしながら、この場合、多数の発信源を用いるために高いコストがかかる。従って、コストの大幅な増大をまねくことなく、人又は物が予め決められたエリアにあるか否かを従来よりも高精度に決定することが求められる。
【0006】
本開示の目的は、人又は物が予め決められたエリアにあるか否かを従来よりも高精度に決定することができる警報システムを提供することにある。また、本開示の目的は、そのような警報システムのための移動局及びプログラムを提供することにある。
【課題を解決するための手段】
【0007】
本開示の一態様によれば、
第1の固定局、第2の固定局、及び移動局を含む警報システムであって、
前記第1及び第2の固定局は、第1及び第2のエリアの境界線上における異なる位置にそれぞれ設けられ、
前記第1の固定局は、
前記境界線から前記第1のエリアの側に向かう第1の主ビーム方向を有する第1の送信アンテナと、
前記境界線から前記第2のエリアの側に向かう第2の主ビーム方向を有する第2の送信アンテナと、
前記第1の送信アンテナを介して第1のビーコン信号を送信し、前記第2の送信アンテナを介して第2のビーコン信号を送信する第1の送信回路とを備え、
前記第2の固定局は、
前記境界線から前記第1のエリアの側に向かう第3の主ビーム方向を有する第3の送信アンテナと、
前記境界線から前記第2のエリアの側に向かう第4の主ビーム方向を有する第4の送信アンテナと、
前記第3の送信アンテナを介して第3のビーコン信号を送信し、前記第4の送信アンテナを介して第4のビーコン信号を送信する第2の送信回路とを備え、
前記移動局は、
受信アンテナと、
前記受信アンテナを介して前記第1~第4のビーコン信号を受信し、前記第1~第4のビーコン信号の信号レベルを検出する受信回路と、
前記第1~第4のビーコン信号の信号レベルに基づいて、前記移動局が前記第1及び第2のエリアのいずれにあるかを決定する処理回路と、
前記移動局が前記第2のエリアにある場合、前記移動局が前記第2のエリアにあることを示す第1の警報信号を出力する出力装置とを備え、
前記処理回路は、
前記第1及び第2のビーコン信号の信号レベルに基づいて、前記第1の固定局を基準として前記移動局が前記境界線のいずれの側に位置しているかを暫定的に示す第1の暫定位置を決定し、
前記第3及び第4のビーコン信号の信号レベルに基づいて、前記第2の固定局を基準として前記移動局が前記境界線のいずれの側に位置しているかを暫定的に示す第2の暫定位置を決定し、
前記第1及び第2の暫定位置に基づいて、前記移動局が前記第1及び第2のエリアのいずれにあるかを決定する。
【発明の効果】
【0008】
本開示の一態様に係る警報システムは、人又は物が予め決められたエリアにあるか否かを従来よりも高精度に決定することができる。
【図面の簡単な説明】
【0009】
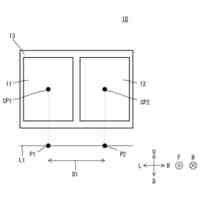
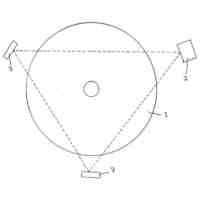
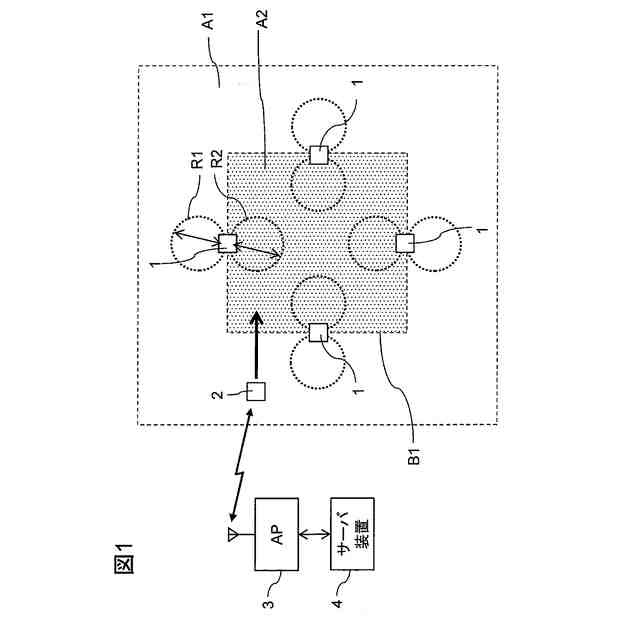
第1の実施形態に係る警報システムを示す概略図である。
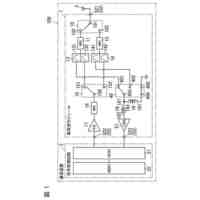
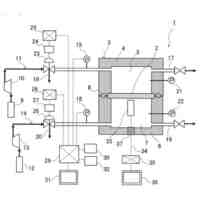
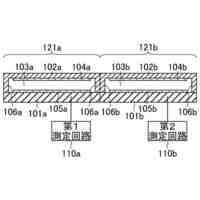
図1の固定局1の構成を示すブロック図である。
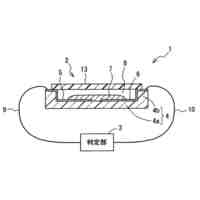
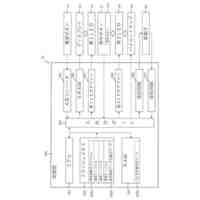
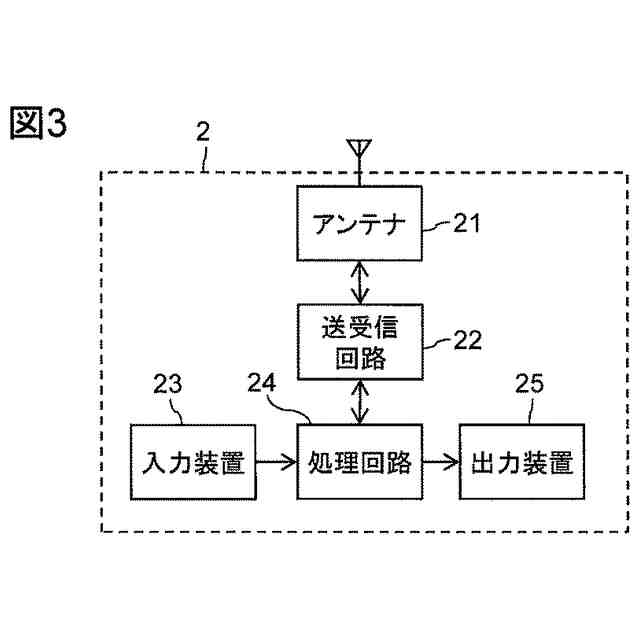
図1の移動局2の構成を示すブロック図である。
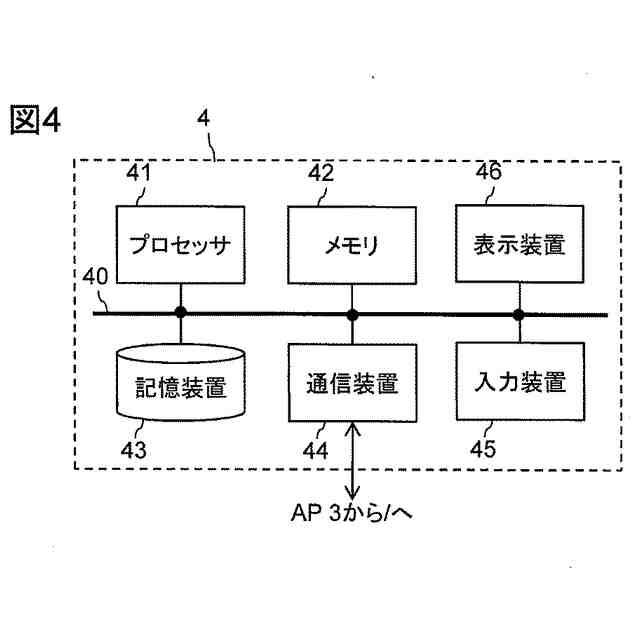
図1のサーバ装置4の構成を示すブロック図である。
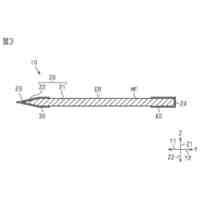
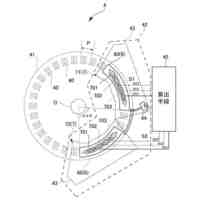
図2の固定局1の例示的な放射パターンを示す図である。
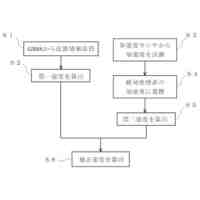
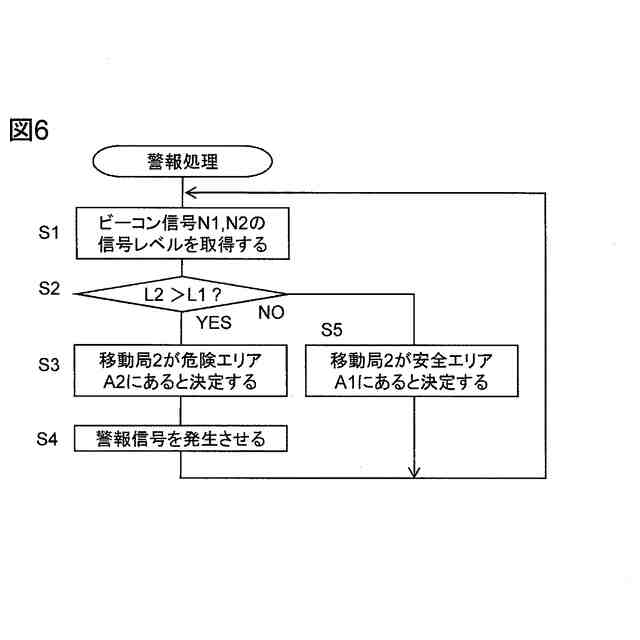
図3の処理回路24によって実行される警報処理を示すフローチャートである。
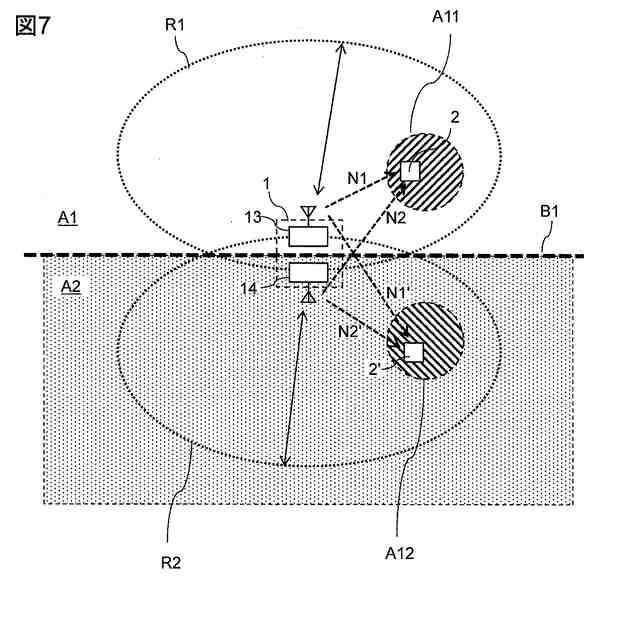
図1の警報システムにおけるマルチパスの影響を説明するための図である。
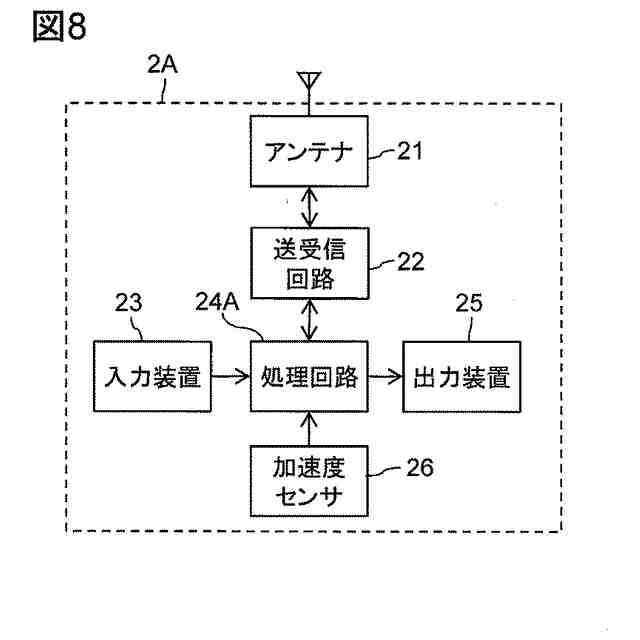
第1の実施形態の変形例に係る警報システムの移動局2Aの構成を示すブロック図である。
第2の実施形態に係る警報システムの動作を説明するための図である。
図9の移動局2の処理回路24によって実行される警報処理を示すフローチャートである。
図10のステップS101のサブルーチンを示すフローチャートである。
図10のステップS102のサブルーチンを示すフローチャートである。
第2の実施形態に係る警報システムによる安全エリアA1及び危険エリアA2の決定を説明するための表である。
第3の実施形態に係る警報システムの動作を説明するための図である。
第3の実施形態に係る警報システムの移動局2によって実行される警報処理を示すフローチャートである。
第3の実施形態の第1の変形例に係る警報システムの移動局2によって実行される警報処理を示すフローチャートである。
第3の実施形態の第2の変形例に係る警報システムの動作を説明するための図である。
第3の実施形態の第2の変形例に係る警報システムの移動局2によって実行される警報処理を示すフローチャートである。
第4の実施形態に係る警報システムの動作を説明するための図である。
第4の実施形態の第1の変形例に係る警報システムの動作を説明するための図である。
図19の移動局2の処理回路24によって実行される警報処理を示すフローチャートである。
図21のステップS201のサブルーチンを示すフローチャートである。
図21のステップS202のサブルーチンを示すフローチャートである。
第4の実施形態の第1の変形例に係る警報システムによる安全エリアA1、危険エリアA2、及び警戒エリアA3の決定を説明するための表である。
第4の実施形態の第2の変形例に係る警報システムの動作を説明するための図である。
第5の実施形態に係る警報システムの動作を説明するための図である。
第6の実施形態に係る警報システムの固定局1Aの構成を示すブロック図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本発明の実施形態に係る警報システムについて説明する。各図面にわたって、同じ符号は同様の構成要素を示す。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社村田製作所
弾性波装置
今日
株式会社村田製作所
電波レンズ
今日
株式会社村田製作所
微小物体の捕集装置
1日前
株式会社村田製作所
コンデンサモジュール
6日前
株式会社村田製作所
インダクタ素子及び集積回路
1日前
株式会社村田製作所
高周波モジュール及び通信装置
今日
株式会社村田製作所
高周波モジュール及び通信装置
今日
株式会社村田製作所
弾性波装置およびマルチプレクサ
6日前
株式会社村田製作所
センサユニット
2日前
マクセル株式会社
レンズユニット、カメラモジュール、撮像システムおよび移動体
今日
株式会社村田製作所
カット刃、及びカット刃の製造方法
13日前
株式会社大真空
センサ
13日前
株式会社ミツトヨ
エンコーダ
7日前
日本FC企画株式会社
特性試験装置
9日前
学校法人同志社
測位システム
1日前
日本碍子株式会社
ガスセンサ
6日前
日本精機株式会社
基板及び表示装置
1日前
アズビル株式会社
圧力センサ
6日前
本多電子株式会社
水中探知装置
今日
株式会社東芝
センサ
20日前
株式会社ミツトヨ
自動測定装置
今日
株式会社ミツトヨ
自動測定装置
今日
株式会社ミツトヨ
変位測定装置
20日前
株式会社小野測器
回転計測装置
20日前
アズビル株式会社
濃度計測装置
今日
株式会社東芝
センサ
6日前
エスペック株式会社
環境試験装置
6日前
アズビル株式会社
検査用プローブ
14日前
アズビル株式会社
回転角度計測装置
今日
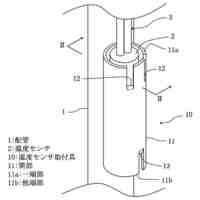
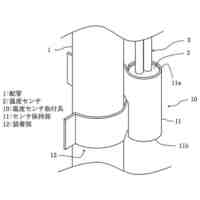
株式会社ノーリツ
温度センサ取付具
7日前
積水ハウス株式会社
測定治具
6日前
古河電気工業株式会社
漏水検知構造
7日前
個人
レーザージャイロ応用重力場計測装置
8日前
トヨタ自動車株式会社
異音解析方法
20日前
株式会社ノーリツ
温度センサ取付具
7日前
株式会社桧鉄工所
流速計
今日
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ