TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024176151
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023094449
出願日
2023-06-08
発明の名称
垂直離着陸機
出願人
国立研究開発法人宇宙航空研究開発機構
代理人
弁理士法人南青山国際特許事務所
主分類
B64C
27/08 20230101AFI20241212BHJP(航空機;飛行;宇宙工学)
要約
【課題】小型化及び高速化が可能な垂直離着陸機を提供する。
【解決手段】本発明の一形態に係る垂直離着陸機は、左右一対の棒状支持部材と、推進プロペラと、垂直昇降用のロータと、制御部とを具備する。上記左右一対の棒状支持部材は、前後方向に延び、左右両側に設けられる。上記ロータは、上記棒状支持部材それぞれに前後方向に2以上配置され、それぞれが複数のブレードを有し、所定の回転方向で回転して揚力を発生させる。上記制御部は、前進飛行時に上記ロータを回転させ、上記ロータの実効揚抗比が閾値以上になる、飛行速度と上記ロータの翼端速度との比を表す前進率となるように、上記ロータの回転数及び上記ブレードのピッチ角を制御する。
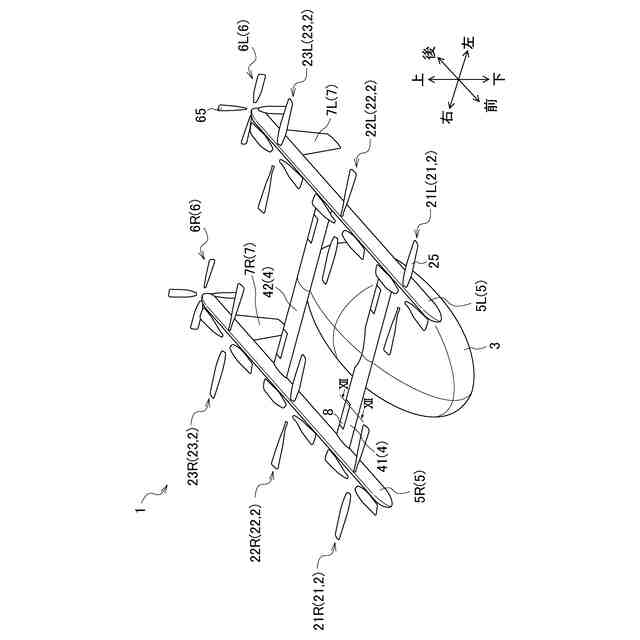
【選択図】図9
特許請求の範囲
【請求項1】
前後方向に延び、左右両側に設けられた左右一対の棒状支持部材と、
推進プロペラと、
前記棒状支持部材それぞれに前後方向に2以上配置され、それぞれが複数のブレードを有し、所定の回転方向で回転して揚力を発生させる垂直昇降用のロータと、
前進飛行時に前記ロータを回転させ、前記ロータの実効揚抗比が閾値以上になる、飛行速度と前記ロータの翼端速度との比を表す前進率となるように、前記ロータの回転数及び前記ブレードのピッチ角を制御する制御部と
を具備する垂直離着陸機。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の垂直離着陸機であって、
前記制御部は、
前記垂直離着陸機の飛行速度情報を取得し、
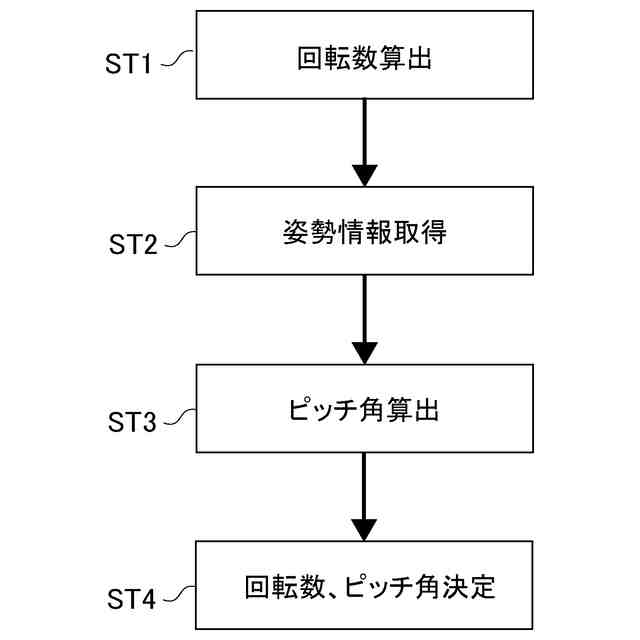
前記飛行速度情報を用い、予め準備した前記ロータの実効揚抗比と前記前進率との関係を示す第1のデータに基づいて、前記ロータの実効揚抗比が閾値以上になる前進率となるように、前記ロータの回転数の範囲を算出し、
前記飛行速度情報を用いて、前記算出したロータの回転数の範囲内で、前記ロータに必要な揚力を生じさせる前記ブレードのピッチ角の範囲を算出し、
算出した前記ロータの回転数の範囲内かつ前記ブレードのピッチ角の範囲内で、前記ロータの回転数及び前記ブレードのピッチ角を決定する
垂直離着陸機。
【請求項3】
請求項2に記載の垂直離着陸機であって、
前記制御部は、
前記垂直離着陸機の姿勢情報を取得し、
前記姿勢情報を加味して、前記ロータの回転数と前記ブレードのピッチ角を決定する
垂直離着陸機。
【請求項4】
請求項2に記載の垂直離着陸機であって、
予め準備した、前記第1のデータと、飛行速度毎の、前記ロータの回転数、前記ブレードのピッチ角及び前記ロータの実効揚抗比との関係を示す第2のデータとを記憶する記憶装置を更に具備し、
前記制御部は、
前記ロータの回転数の算出において、前記飛行速度情報を用い、前記第1のデータに基づいて、前記ロータの実効揚抗比が閾値以上になる前進率となる前記ロータの回転数の範囲を算出し、
前記ブレードのピッチ角の範囲の算出において、前記飛行速度情報を用い、前記第2のデータに基づいて、前記算出したロータの回転数の範囲内で、前記ロータに必要な揚力を生じさせる前記ブレードのピッチ角の範囲を算出する
垂直離着陸機。
【請求項5】
請求項1に記載の垂直離着陸機であって、
前記ロータの実効揚抗比が閾値以上となる前進率は0.5以上である
垂直離着離着陸機。
【請求項6】
請求項2に記載の垂直離着陸機であって、
前記ロータは、左右一対のロータからなるロータ群を複数形成するように、前記棒状支持部材それぞれに同数配置され、
前記制御部は、前記ロータそれぞれの回転数が前記算出したロータの回転数の範囲内となる条件下で、前記複数のロータ群のうち1つのロータ群に属するロータの回転数を、他のロータ群に属するロータの回転数と異なるように制御する
垂直離着陸機。
【請求項7】
請求項1に記載の垂直離着陸機であって、
前記制御部は、所定速度以上の飛行速度での前進飛行時に、前記ロータの実効揚抗比が閾値以上になる前進率となるように、前記ロータの回転数及び前記ブレードのピッチ角を制御する
垂直離着陸機。
【請求項8】
請求項7に記載の垂直離着陸機であって、
前記所定速度は100km/hである
垂直離着陸機。
【請求項9】
請求項1に記載の垂直離着陸機であって、
前記制御部は、前進飛行時に、中心が前後方向に平行な同一直線上に前後に隣接して位置する2つの前記ロータを、互いの回転方向が逆となるように回転させる
垂直離着陸機。
【請求項10】
請求項9に記載の垂直離着陸機であって、
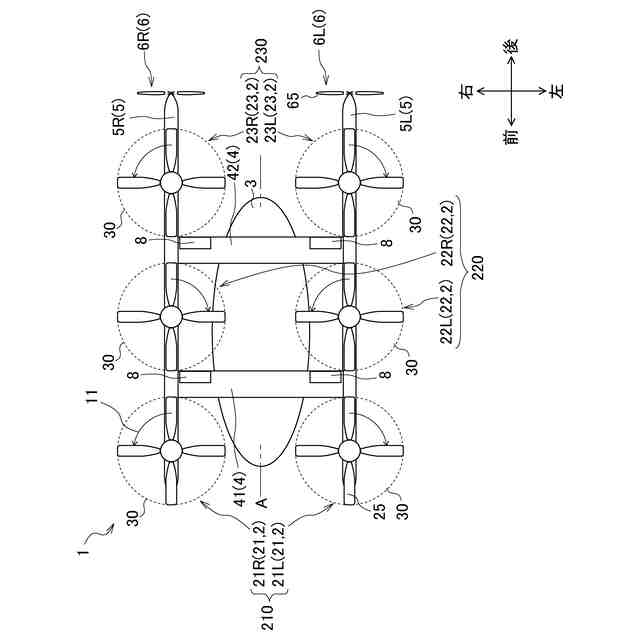
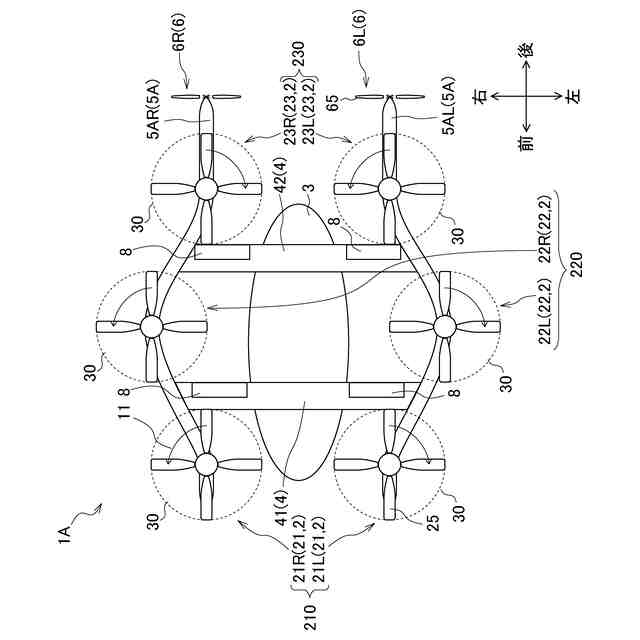
前記ロータは、前記棒状支持部材それぞれに、その中心が前後方向に平行な同一直線上に位置するように3つ配置され、
右側の前記棒状支持部材に配置される3つのロータは、前方から後方にむかって順に並ぶ右側第1ロータ、右側第2ロータ及び右側第3ロータであり、
左側の前記棒状支持部材に配置される3つのロータは、前方から後方にむかって順に並ぶ左側第1ロータ、左側第2ロータ及び左側第3ロータであり、
前記制御部は、前記右側第1ロータ、前記右側第3ロータ、前記左側第2ロータを、上から見て回転方向が反時計回りとなるように回転させ、前記右側第2ロータ、前記左側第1ロータ及び前記左側第3ロータを、回転方向が時計周りとなるように回転させる
垂直離着陸機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、垂直離着陸機に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
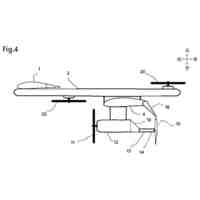
通常のマルチロータ型の垂直離着陸機は、複数のロータを備え、前進飛行時ではロータが前傾し、揚力と推進力を同時に発生させている。また、垂直離着陸用のロータと推進プロペラとを搭載し、固定翼を有する複合型(リフト&クルーズ型)マルチロータ垂直離着陸機(特許文献1~5参照。)は、前進飛行時、ロータの回転を停止し、推進プロペラによって推進力を発生させ、揚力を固定翼で発生させている。
【0003】
また、非特許文献1及び2には、前進飛行時に、ロータの回転により揚力を発生させ、推進プロペラによって前進させる、4つのロータと推進プロペラを備えたマルチロータの垂直離着陸機が記載されている。このような垂直離着陸機では、前方側のロータにより発生した後流(吹きおろし)がその後方にあるロータに干渉する流れ場干渉が生じ、流れ場干渉によるロータの性能低下を引き起こす可能性がある。非特許文献1及び2には4つのロータを用いた可変ピッチと可変回転数によるロータのリフトオフセット特性を利用してロータを高性能化することが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-151924号公報
特開2022-148991号公報
米国特許登録第10046853号公報
米国特許公開2019-0127056号公報
中国特許公開第115042968号公報
【非特許文献】
【0005】
Proceedings of 47th European Rotorcraft Forum, Sayama, Y. Hayami, K., Tanabe, Y., Sugawara, H., Kameda, M., 7-9th Sept. 2021, Paper# 95, "PERFORMANCE OF A DUAL-CONTROLLED ROTOR IN LEVEL FLIGHT"
第54回流体力学講演会/第40回航空宇宙数値シミュレーション技術シンポジウム講演集,佐山悠斗,菅原瑛明,田辺安忠,亀田正治,2022年6月29日~7月1日,JSASS-2022-2033-F+A-1B15, "前進飛行中のマルチロータの空力統制に及ぼす後方ロータ上下位置の影響"
【発明の概要】
【発明が解決しようとする課題】
【0006】
マルチロータ型の垂直離着陸機では、揚力と推進力を同時に発生する必要があるため高速性能に課題がある。また、複合型マルチロータ垂直離着陸機では、前進飛行時は揚力を固定翼に発生させる必要があるため、固定翼の存在による機体サイズの大型化の課題がある。
【0007】
以上のような事情に鑑み、本発明の目的は、小型化及び高速化が可能な垂直離着陸機を提供することにある。
【課題を解決するための手段】
【0008】
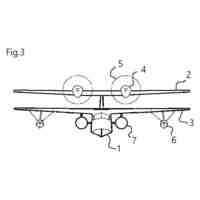
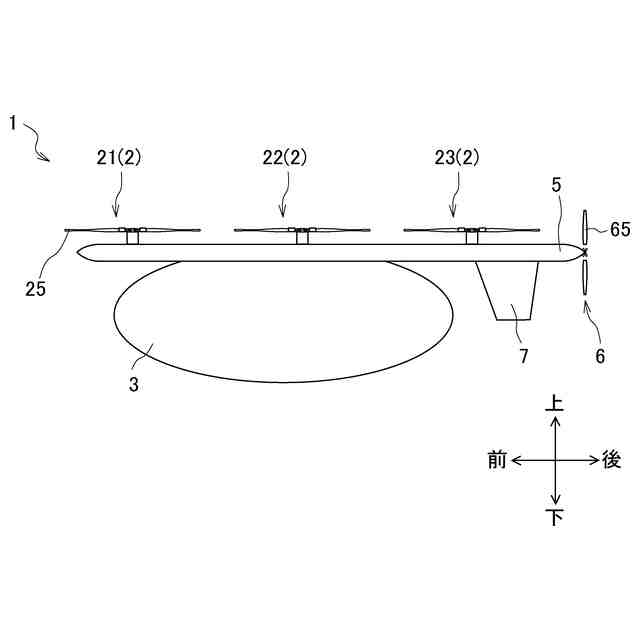
上記目的を達成するため、本発明の一形態に係る垂直離着陸機は、左右一対の棒状支持部材と、推進プロペラと、垂直昇降用のロータと、制御部とを具備する。上記左右一対の棒状支持部材は、前後方向に延び、左右両側に設けられる。上記ロータは、上記棒状支持部材それぞれに前後方向に2以上配置され、それぞれが複数のブレードを有し、所定の回転方向で回転して揚力を発生させる。上記制御部は、前進飛行時に上記ロータを回転させ、上記ロータの実効揚抗比が閾値以上になる、飛行速度と上記ロータの翼端速度との比を表す前進率となるように、上記ロータの回転数及び上記ブレードのピッチ角を制御する。
【0009】
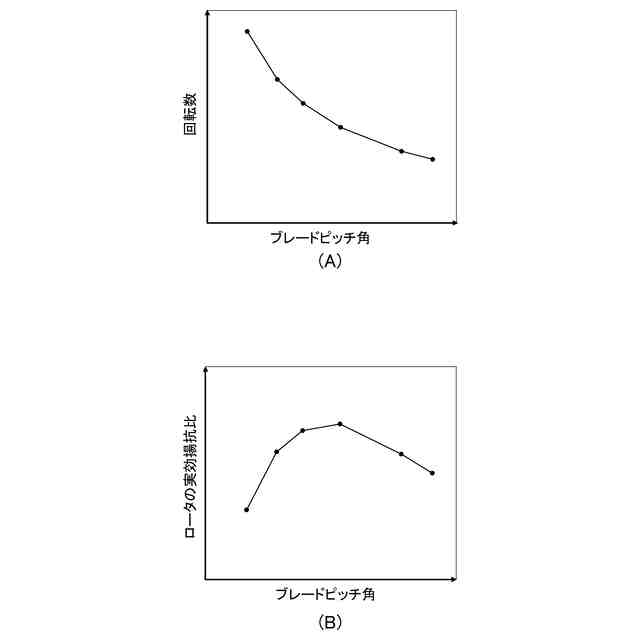
本発明の一形態に係わる垂直離着陸機では、前進飛行時に、ロータによって揚力を発生させ、推進プロペラによって推進力を発生させる。このようにロータによって前進飛行時の揚力を発生させることで、前進飛行時の揚力の一部又は全てをロータで確保することができ、機体の小型化が可能となる。また、推進プロペラを設けることで高速化が可能となる。更に、前進飛行時に、ロータの実効揚抗比が閾値以上にある前進率(飛行速度/翼端速度)となるようにロータの回転数を制御することで、ロータの回転面において、前進側では揚力が大きく生じる状態とし、後退側では揚力が生じない状態又はそれに近い状態となるように、揚力分布を調整することできる。これにより、ロータにより生じる後流分布(吹きおろし分布)を調整することができ、前方にあるロータの吹きおろしによる後方ロータへの干渉である流れ場干渉を低減し、流れ場干渉によるロータ性能の低下を抑制することができる。流れ場干渉によるロータ性能の低下が抑制されることで、ロータによって前進飛行時の揚力の一部又は全てをより確実に確保することができるので、機体の小型化が可能となる。
【0010】
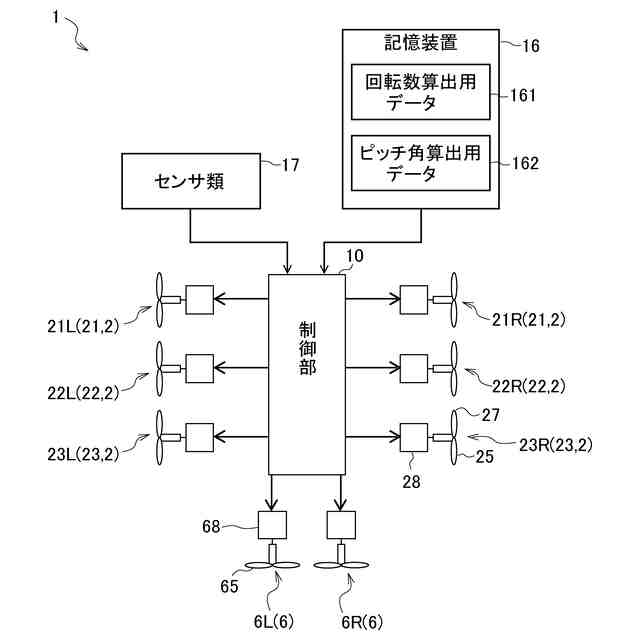
上記制御部は、上記垂直離着陸機の飛行速度情報を取得し、上記飛行速度情報を用い、予め準備した上記ロータの実効揚抗比と上記前進率との関係を示す第1のデータに基づいて、上記ロータの実効揚抗比が閾値以上になる前進率となるように、上記ロータの回転数の範囲を算出し、上記飛行速度情報を用いて、上記算出したロータの回転数の範囲内で、上記ロータに必要な揚力を生じさせる上記ブレードのピッチ角の範囲を算出し、算出した上記ロータの回転数の範囲内かつ上記ブレードのピッチ角の範囲内で、上記ロータの回転数及び上記ブレードのピッチ角を決定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
人工台風
13日前
個人
ドローン
5か月前
個人
着火ドローン
2か月前
個人
救難消防飛行艇
2か月前
個人
ドローンシステム
6か月前
東レ株式会社
中空回転翼
1か月前
個人
陸海空用の乗り物
3か月前
個人
連続回転可能な飛行機翼
2か月前
株式会社三圓
浮上装置
10か月前
個人
導風板付き垂直離着陸機
3日前
個人
ドローンの計測操作方法2
11か月前
個人
垂直離着陸機用エンジン改
6か月前
個人
ドローンの計測操作方法3
11か月前
東レ株式会社
プロペラブレード
1か月前
東レ株式会社
プロペラブレード
1か月前
個人
空飛ぶクルマ
1か月前
東レ株式会社
プロペラブレード
1か月前
キヤノン電子株式会社
磁気トルカ
11か月前
個人
空中移動システム
7か月前
個人
ドローンを自動離着陸する方法
6か月前
個人
ドローン消音装置
9か月前
個人
エアライナー全自動パラシュート
5か月前
トヨタ自動車株式会社
ドローン
4か月前
個人
搬送方法および搬送システム
2か月前
個人
ヘリコプター駆動装置
2か月前
合同会社アドエア
パラシュート射出装置
5か月前
株式会社ACSL
システム
5か月前
合同会社アドエア
飛行体の落下補助装置
7か月前
株式会社ACSL
システム
5か月前
株式会社小糸製作所
飛行体ポート
2か月前
個人
パラボラ型スペースデブリカタパルト
1か月前
個人
飛行体
1か月前
株式会社SUBARU
移動体
7か月前
個人
飛行体
1か月前
個人
垂直離着陸機用ガスタービンエンジン
6か月前
全日本空輸株式会社
ドーリシステム
9か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ