TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024172792
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023090761
出願日
2023-06-01
発明の名称
基板搬送システム、および、基板搬送方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20241205BHJP(基本的電気素子)
要約
【課題】基板搬送ロボットによる基板の搬送動作の制御を行うために作業者が要する手間を軽減することが可能な基板搬送システム、および、基板搬送方法を提供する。
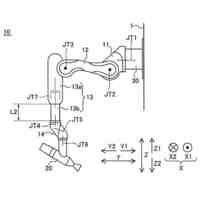
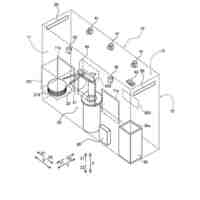
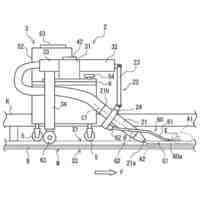
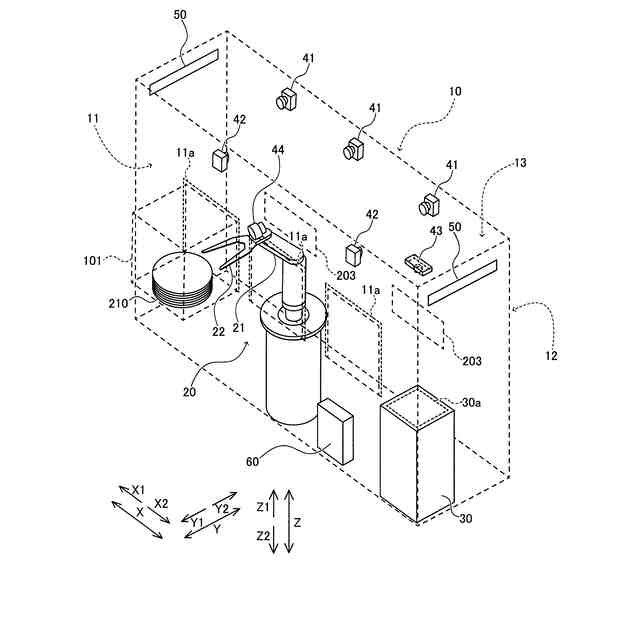
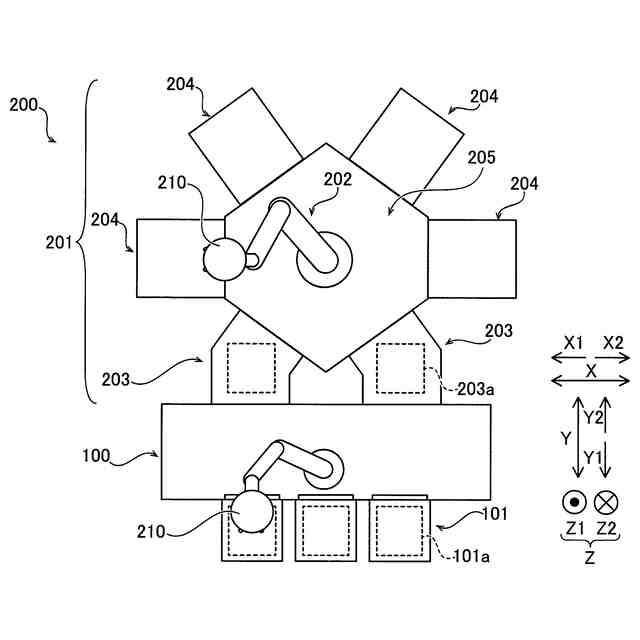
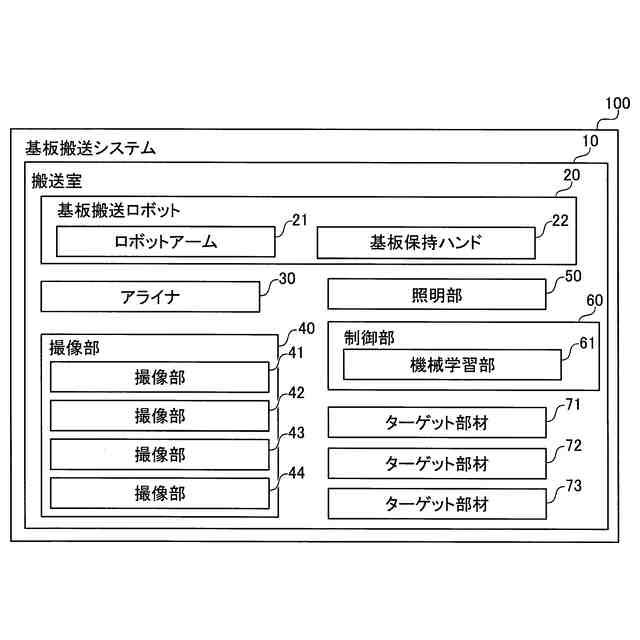
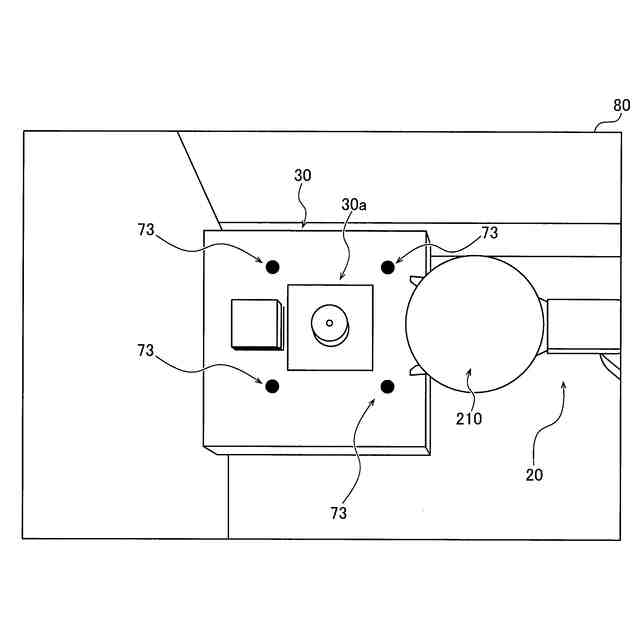
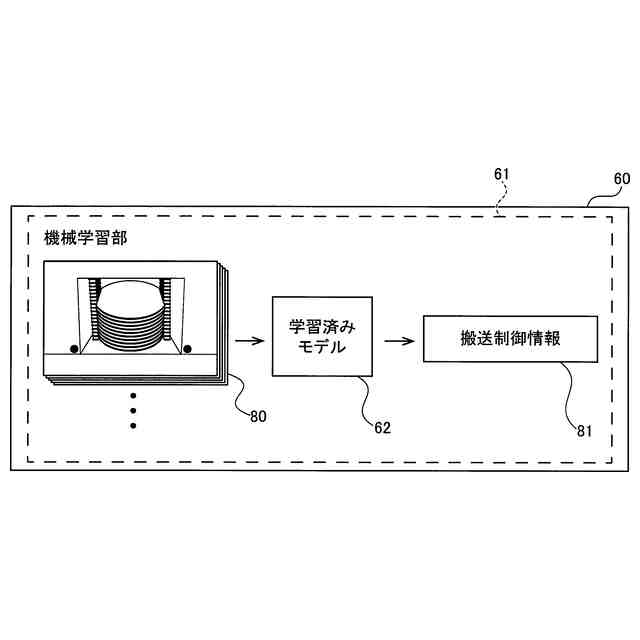
【解決手段】この基板搬送システム100は、基板搬送ロボット20により搬送される基板210と、基板210が載置される基板載置部30aとの少なくとも一方を検出する撮像部43を備える。そして、基板搬送システム100は、撮像部43による検出結果を入力とし、基板搬送ロボット20による基板210の搬送動作を制御するための搬送制御情報を出力する学習済みモデルを、機械学習により生成する制御部60を備える。
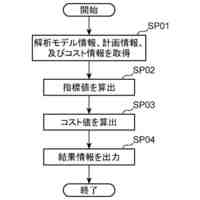
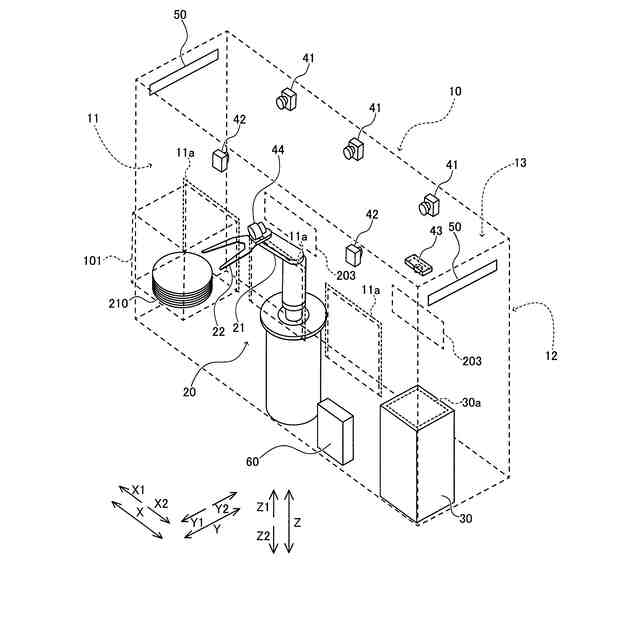
【選択図】図3
特許請求の範囲
【請求項1】
基板搬送ロボットと、
前記基板搬送ロボットにより搬送される基板と、前記基板が載置される基板載置部との少なくとも一方を検出する検出部と、
前記検出部による前記基板および前記基板載置部の少なくとも一方の検出結果を入力とし、前記基板搬送ロボットによる前記基板の搬送動作を制御するための搬送制御情報を出力する学習済みモデルを、機械学習により生成する制御部とを、備える、基板搬送システム。
続きを表示(約 1,300 文字)
【請求項2】
前記制御部は、深層強化学習による機械学習によって前記学習済みモデルを生成する、請求項1に記載の基板搬送システム。
【請求項3】
前記制御部は、前記検出結果を入力とし、前記基板搬送ロボットと、前記基板載置部の位置との座標軸を合わせるための教示情報を含む前記搬送制御情報を出力する前記学習済みモデルを機械学習により生成する、請求項1または2に記載の基板搬送システム。
【請求項4】
前記検出部は、前記基板および前記基板載置部の少なくとも一方に加えて、前記基板搬送ロボットを検出し、
前記制御部は、前記基板および前記基板載置部の少なくとも一方の前記検出結果と、前記基板搬送ロボットの前記検出結果とを入力とし、前記搬送制御情報を出力する前記学習済みモデルを生成する、請求項1または2に記載の基板搬送システム。
【請求項5】
前記制御部は、
前記基板搬送ロボットの搬送動作を制御するロボット制御部を兼ね、
前記学習済みモデルを用いることによって前記搬送制御情報を取得するとともに、取得された前記搬送制御情報に基づく前記基板の搬送動作を行うことによって、搬送動作におけるずれを補正しながら、前記基板搬送ロボットの搬送動作を制御する、請求項1または2に記載の基板搬送システム。
【請求項6】
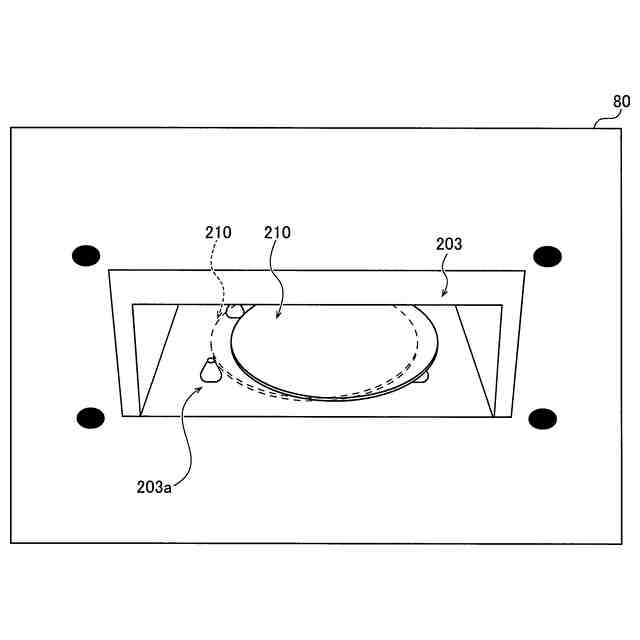
前記検出部は、前記基板と、前記基板載置部と、前記基板載置部の位置を示すターゲット部材との少なくとも1つを撮像する撮像部を含み、
前記制御部は、前記検出部による前記検出結果として取得された前記撮像部による撮像画像を入力とし、前記搬送制御情報を出力する前記学習済みモデルを機械学習により生成する、請求項1または2に記載の基板搬送システム。
【請求項7】
前記基板載置部の位置を示す前記ターゲット部材をさらに備え、
前記撮像部は、前記ターゲット部材を撮像し、
前記制御部は、前記検出結果として取得された前記ターゲット部材を含む前記撮像画像を入力とし、前記搬送制御情報を出力する前記学習済みモデルを機械学習によって生成する、請求項6に記載の基板搬送システム。
【請求項8】
前記ターゲット部材は、前記学習済みモデルを生成する機械学習において識別されるように、前記撮像画像において所定の形状を有している、請求項7に記載の基板搬送システム。
【請求項9】
前記基板搬送ロボットが配置され、前記基板の搬送が行われる搬送室をさらに備え、
前記撮像部は、前記搬送室に配置されている、請求項6に記載の基板搬送システム。
【請求項10】
前記撮像部は、前記搬送室に配置されている搬送室撮像部と、前記基板搬送ロボットに配置されているロボット撮像部とを含み、
前記制御部は、前記搬送室撮像部による前記撮像画像と、前記ロボット撮像部による前記撮像画像とを入力とし、前記搬送制御情報を出力する前記学習済みモデルを械学習により生成する、請求項9に記載の基板搬送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、基板搬送システム、および、基板搬送方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、基板を搬送する基板搬送方法が開示されている。特許文献1には、基板搬送室に配置された搬送ロボットによって、基板の処理が行われる基板処理室の載置台に対して基板が搬送される基板搬送方法が開示されている。搬送ロボットは、基板が載置されるフォークを有している。また、基板搬送室内には、フォークに載置された基板を検出する位置センサが配置されている。特許文献1に記載の基板搬送方法では、フォークに載置された基板が位置センサにより検出されることによって、フォークに対する基板の位置ずれを補正するように、搬送ロボットによる基板の搬送経路が修正される。
【先行技術文献】
【特許文献】
【0003】
特許第6640321号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、基板の搬送動作を行う場合には、基板を搬送する搬送ロボットである基板搬送ロボットに対して搬送動作を教示する必要がある。上記特許文献1では、基板を保持するフォークに対する基板の位置ずれが位置センサにより検出される一方で、基板搬送ロボットの搬送動作の教示を人の手によって行う必要がある。そのため、基板載置部の位置などの基板搬送システムの構成ごとに搬送動作の教示を行う必要があるため、基板搬送ロボットに対する搬送動作の教示の手間が作業者にとって負担となると考えられる。そのため、基板搬送ロボットによる基板の搬送動作の制御を行うために作業者が要する手間を軽減することが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、基板搬送ロボットによる基板の搬送動作の制御を行うために作業者が要する手間を軽減することが可能な基板搬送システム、および、基板搬送方法を提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面による基板搬送システムは、基板搬送ロボットと、基板搬送ロボットにより搬送される基板と、基板が載置される基板載置部との少なくとも一方を検出する検出部と、検出部による基板および基板載置部の少なくとも一方の検出結果を入力とし、基板搬送ロボットによる基板の搬送動作を制御するための搬送制御情報を出力する学習済みモデルを、機械学習により生成する制御部とを、備える。
【0007】
この開示の第1の局面による基板搬送システムは、上記のように、検出部による基板および基板載置部の少なくとも一方の検出結果を入力とし、基板搬送ロボットによる基板の搬送動作を制御するための搬送制御情報を出力する学習済みモデルを、機械学習により生成する。これにより、機械学習により生成された学習済みモデルからの出力に基づいて、基板の搬送動作の制御を自動的に行うことができる。その結果、基板載置部に対する基板の搬送動作の教示を人の手によって行う場合に比べて、基板搬送ロボットによる基板の搬送動作の制御を行うために作業者が要する手間を軽減できる。
【0008】
この開示の第2の局面による基板搬送方法は、基板搬送ロボットにより搬送される基板と、基板が載置される基板載置部との少なくとも一方を検出し、基板および基板載置部の少なくとも一方の検出結果を入力とし、基板搬送ロボットによる基板の搬送動作を制御するための搬送制御情報を出力する学習済みモデルを、機械学習により生成する。
【0009】
この開示の第2の局面による基板搬送方法は、上記のように、基板および基板載置部の少なくとも一方の検出結果を入力とし、基板搬送ロボットによる基板の搬送動作を制御するための搬送制御情報を出力する学習済みモデルを、機械学習により生成する。これにより、機械学習により生成された学習済みモデルからの出力に基づいて、基板の搬送動作の制御を自動的に行うことができる。その結果、基板載置部に対する基板の搬送動作の教示を人の手によって行う場合に比べて、基板搬送ロボットによる基板の搬送動作の制御を行うために作業者が要する手間を軽減することが可能な基板搬送方法を提供できる。
【発明の効果】
【0010】
本開示によれば、基板搬送ロボットによる基板の搬送動作の制御を行うために作業者が要する手間を軽減できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
加工機
1日前
川崎重工業株式会社
ロボット
8日前
川崎重工業株式会社
ロボット
15日前
川崎重工業株式会社
ガスタービンエンジン
1日前
川崎重工業株式会社
ガスタービンエンジンの軸受構造
1日前
川崎重工業株式会社
液化ガスの荷役方法および荷役装置
1日前
川崎重工業株式会社
塗装ロボットシステムおよびロボット
8日前
川崎重工業株式会社
エネルギーマネジメントシステム及び方法
2日前
川崎重工業株式会社
基板搬送システム、および、基板搬送方法
15日前
川崎重工業株式会社
発電機及びこれを備えるガスタービンエンジン
1日前
川崎重工業株式会社
情報処理方法、情報処理装置、及びプログラム
3日前
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
9日前
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
9日前
川崎重工業株式会社
始動システムの制御器および始動システムの制御方法
8日前
川崎重工業株式会社
発電システムの制御器および発電システムの制御方法
8日前
川崎重工業株式会社
始動システムの制御器および始動システムの制御方法
8日前
川崎重工業株式会社
ロボット用吸着ハンド、ロボットおよび廃棄物処理システム
9日前
川崎重工業株式会社
監視設備、防火・監視システム、及び、配管・監視システム
15日前
川崎重工業株式会社
基板搬送システム、基板検査システム、および、基板異常検出方法
15日前
川崎重工業株式会社
加工機および加工方法
1日前
川崎重工業株式会社
水電解一体型メタネーションセル、及び、それを用いた電解メタネーション装置
10日前
川崎重工業株式会社
水電解一体型メタネーションセル、並びに、それを用いた積層メタネーションセルおよび電解メタネーション装置
10日前
個人
電波吸収体
10日前
東レ株式会社
二次電池
1日前
個人
タワー式増設端子台
23日前
愛知電機株式会社
変圧器
8日前
電建株式会社
端子金具
15日前
SMK株式会社
コネクタ
15日前
三菱電機株式会社
端子カバー
1日前
桑野工業株式会社
同軸プラグ
28日前
株式会社カネカ
接着加工装置
10日前
株式会社カネカ
接着加工装置
10日前
太陽誘電株式会社
全固体電池
10日前
株式会社水素パワー
接続構造
10日前
三菱電機株式会社
回路遮断器
15日前
富士電機株式会社
半導体装置
15日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ