TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024171554
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023088622
出願日
2023-05-30
発明の名称
測定システム、処理方法、およびプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
H01Q
3/08 20060101AFI20241205BHJP(基本的電気素子)
要約
【課題】アンテナ装置が設置された後であっても、AZ(AZimuth)軸とEL(ELevation)軸との交点であるARP(Antenna Reference Point)の位置を精度よく推定するための情報を取得することのできる測定システムを提供する。
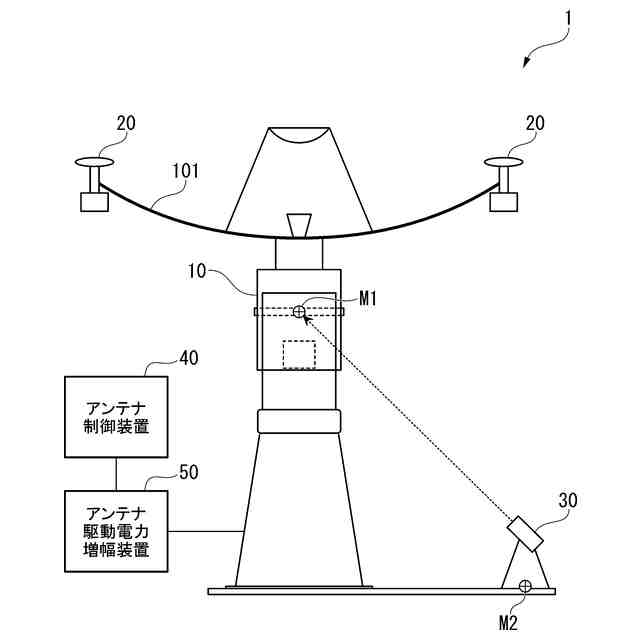
【解決手段】測定システムは、アンテナの向きをAZ軸の高さ方向に向けさせ、前記アンテナを前記AZ軸回りに回転させる制御を行う制御装置と、前記アンテナに設けられ、前記アンテナが前記AZ軸回りに回転する際に緯度および経度を測定するGNSSと、前記アンテナが設置される基礎上のマーカーの位置と前記アンテナにおけるEL軸の中心の高さに一致する位置との比高と、前記GNSSが測定した前記緯度および経度とに基づいて、前記AZ軸と前記EL軸との交点であるARP(Antenna Reference Point)の位置を特定する処理部と、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
アンテナの向きをAZ(AZimuth)軸の高さ方向に向けさせ、前記アンテナを前記AZ軸回りに回転させる制御を行う制御装置と、
前記アンテナに設けられ、前記アンテナが前記AZ軸回りに回転する際に緯度および経度を測定するGNSS(Global Navigation Satellite System)と、
前記アンテナが設置される基礎上のマーカーの位置と前記アンテナにおけるEL(ELevation)軸の中心の高さに一致する位置との比高と、前記GNSSが測定した前記緯度および経度とに基づいて、前記AZ軸と前記EL軸との交点であるARP(Antenna Reference Point)の位置を特定する処理部と、
を備える測定システム。
続きを表示(約 1,100 文字)
【請求項2】
前記制御装置は、
前記ARPの位置に求められる精度に応じて、前記アンテナを前記AZ軸回りに回転させる制御を変更する、
請求項1に記載の測定システム。
【請求項3】
前記処理部は、
前記アンテナの近地で電離層および対流圏の影響がほぼ同一と見なせる基準点を基準とした基線解析により前記ARPの位置を特定する、
請求項1に記載の測定システム。
【請求項4】
前記処理部は、
前記GNSSが測定した前記緯度および経度に基づく閉曲線に近い円を求め、求めた円の中心を前記AZ軸とし、前記比高に相当する前記AZ軸の高さ方向の位置を前記ARPと特定する、
請求項1に記載の測定システム。
【請求項5】
前記アンテナが設置される基礎上のマーカーの位置と、前記アンテナにおけるEL軸の中心の高さに一致する位置との比高を特定する測定装置、
を備える請求項1から請求項4の何れか一項に記載の測定システム。
【請求項6】
アンテナの向きをAZ(AZimuth)軸の高さ方向に向けさせ、前記アンテナを前記AZ軸回りに回転させる制御を行うことと、
前記アンテナに設けられたGNSS(Global Navigation Satellite System)により、前記アンテナが前記AZ軸回りに回転する際に緯度および経度を測定することと、
前記アンテナが設置される基礎上のマーカーの位置と前記アンテナにおけるEL(ELevation)軸の中心の高さに一致する位置との比高と、前記GNSSが測定した前記緯度および経度とに基づいて、前記AZ軸と前記EL軸との交点であるARP(Antenna Reference Point)の位置を特定することと、
を含む処理方法。
【請求項7】
コンピュータに、
アンテナに設けられたGNSS(Global Navigation Satellite System)により、前記アンテナがAZ(AZimuth)軸回りに回転する際に緯度および経度を測定する場合に、前記アンテナの向きを前記AZ軸の高さ方向に向けさせ、前記アンテナを前記AZ軸回りに回転させる制御を行うことと、
前記アンテナが設置される基礎上のマーカーの位置と前記アンテナにおけるEL(ELevation)軸の中心の高さに一致する位置との比高と、前記GNSSが測定した前記緯度および経度とに基づいて、前記AZ軸と前記EL軸との交点であるARP(Antenna Reference Point)の位置を特定することと、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、測定システム、処理方法、およびプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
人工衛星を追尾しながら通信するアンテナ装置は、方位角(AZ(AZimuth)角)および仰角(EL(ELevation)角)をそれぞれ調整する軸(以下、「AZ軸」、「EL軸」と記載)を持つアンテナを備え、AZ軸、EL軸を中心とする角度を調整しながら人工衛星を追尾する。特許文献1には、関連する技術として、GPS受信機から得られる複数の位置の情報からアンテナ装置の位置の情報または方位の情報を取得する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-243655号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
人工衛星を追尾しながら通信するとともに、衛星とアンテナとの間の距離及び距離の変化率を測定するアンテナ装置では、アンテナ指向方向と測定した距離及び距離の変化率から衛星の位置と軌道を計算するために、アンテナ装置の正確な位置を把握している必要がある。アンテナ装置の位置は、一般的に、AZ(AZimuth)軸とEL(ELevation)軸との交点であるARP(Antenna Reference Point)によって定義される。しかしながら、アンテナ装置を設置した後では、AZ軸とEL軸との交点の位置にARPの位置を測定するための装置を物理的に存在させることが困難である。そこで、ARPの位置を直接測定するのではなく、アンテナ装置が設置された後であっても、ARPの位置を精度よく推定するための情報を取得することのできる技術が求められている。
【0005】
本開示の各態様は、上記の課題を解決することのできる測定システム、処理方法、およびプログラムを提供することを目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本開示の一態様によれば、測定システムは、アンテナの向きをAZ(AZimuth)軸の高さ方向に向けさせ、前記アンテナを前記AZ軸回りに回転させる制御を行う制御装置と、前記アンテナに設けられ、前記アンテナが前記AZ軸回りに回転する際に緯度および経度を測定するGNSS(Global Navigation Satellite System)と、前記アンテナが設置される基礎上のマーカーの位置と前記アンテナにおけるEL(ELevation)軸の中心の高さに一致する位置との比高と、前記GNSSが測定した前記緯度および経度とに基づいて、前記AZ軸と前記EL軸との交点であるARP(Antenna Reference Point)の位置を特定する処理部と、を備える。
【0007】
上記目的を達成するために、本開示の別の態様によれば、処理方法は、アンテナの向きをAZ(AZimuth)軸の高さ方向に向けさせ、前記アンテナを前記AZ軸回りに回転させる制御を行うことと、前記アンテナに設けられたGNSS(Global Navigation Satellite System)により、前記アンテナが前記AZ軸回りに回転する際に緯度および経度を測定することと、前記アンテナが設置される基礎上のマーカーの位置と前記アンテナにおけるEL(ELevation)軸の中心の高さに一致する位置との比高と、前記GNSSが測定した前記緯度および経度とに基づいて、前記AZ軸と前記EL軸との交点であるARP(Antenna Reference Point)の位置を特定することと、を含む。
【0008】
上記目的を達成するために、本開示の別の態様によれば、プログラムは、コンピュータに、アンテナに設けられたGNSS(Global Navigation Satellite System)により、前記アンテナがAZ(AZimuth)軸回りに回転する際に緯度および経度を測定する場合に、前記アンテナの向きを前記AZ軸の高さ方向に向けさせ、前記アンテナを前記AZ軸回りに回転させる制御を行うことと、前記アンテナが設置される基礎上のマーカーの位置と前記アンテナにおけるEL(ELevation)軸の中心の高さに一致する位置との比高と、前記GNSSが測定した前記緯度および経度とに基づいて、前記AZ軸と前記EL軸との交点であるARP(Antenna Reference Point)の位置を特定することと、を実行させる。
【発明の効果】
【0009】
本開示の各態様によれば、アンテナ装置が設置された後であっても、AZ(AZimuth)軸とEL(ELevation)軸との交点であるARP(Antenna Reference Point)の位置を精度よく推定するための情報を取得することができる。
【図面の簡単な説明】
【0010】
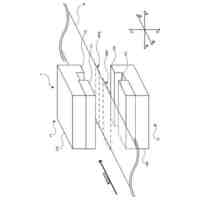
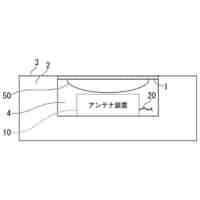
本開示の一実施形態による測定システムの構成の一例を示す図である。
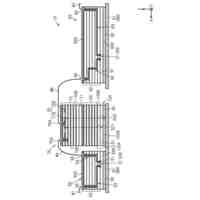
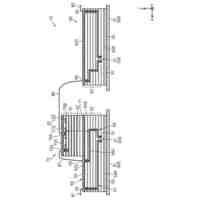
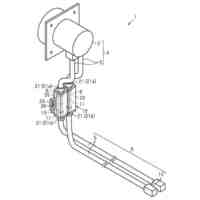
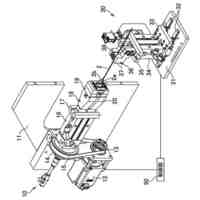
本開示の一実施形態によるアンテナ装置の構成の一例を示す図である。
本開示の一実施形態による処理装置の構成の一例を示す図である。
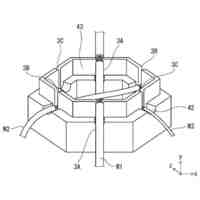
本開示の一実施形態によるGNSSの移動の一例を示す図である。
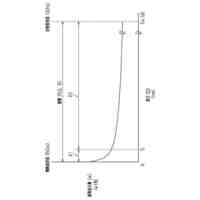
本開示の一実施形態によるGNSSが測定した緯度および経度の測定結果の一例を示す図である。
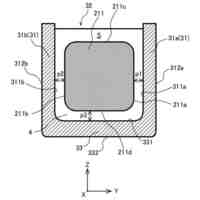
本開示の別の実施形態によるGNSSの設置の一例を示す図である。
本開示の一実施形態による測定システムの処理フローの一例を示す図である。
本開示の実施形態による測定システムの最小構成を示す図である。
本開示の実施形態による最小構成の測定システムの処理フローの一例を示す図である。
少なくとも1つの実施形態に係るコンピュータの構成を示す概略ブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ローム株式会社
保持具
6日前
個人
積層型電解質二次電池
12日前
三菱電機株式会社
同軸フィルタ
9日前
協立電機株式会社
着磁器
5日前
ローム株式会社
半導体装置
5日前
ローム株式会社
半導体装置
5日前
ナカムラマジック株式会社
放熱器
14日前
トヨタバッテリー株式会社
二次電池
今日
株式会社ダイフク
搬送車
6日前
TDK株式会社
電子部品
今日
TDK株式会社
電子部品
5日前
株式会社AESCジャパン
電池パック
5日前
ニデックモビリティ株式会社
トランス
5日前
TDK株式会社
電子部品
5日前
株式会社豊田自動織機
電子機器
5日前
株式会社ディスコ
ウェーハの加工方法
9日前
内橋エステック株式会社
保護素子
5日前
住友電装株式会社
ワイヤハーネス
今日
株式会社デンソー
電子装置
5日前
個人
コンタクト及びこれを用いたICソケット
12日前
TDK株式会社
コイル部品
今日
新光電気工業株式会社
半導体装置
5日前
住友ベークライト株式会社
基板の製造方法
5日前
新光電気工業株式会社
部品実装基板
13日前
矢崎総業株式会社
増し撚り装置
今日
KDDI株式会社
アンテナ装置
13日前
トヨタ紡織株式会社
燃料電池システム
今日
株式会社サンツール
電線圧接コネクタ
9日前
KOA株式会社
抵抗器
今日
富士電機機器制御株式会社
対地バリア
今日
矢崎総業株式会社
防水コネクタ
今日
竹内工業株式会社
ノイズ吸収装置の支持装置
12日前
株式会社フジクラ
移相装置
5日前
TDK株式会社
レーザモジュール
5日前
東京エレクトロン株式会社
基板処理方法
13日前
TOTO株式会社
構造部材
今日
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ