TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024167088
公報種別
公開特許公報(A)
公開日
2024-11-29
出願番号
2024080733
出願日
2024-05-17
発明の名称
知識グラフ内のリンクを決定するための装置及びコンピュータ実装された方法
出願人
ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング
,
ROBERT BOSCH GMBH
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
,
個人
,
個人
主分類
G06N
5/022 20230101AFI20241122BHJP(計算;計数)
要約
【課題】第1のエンティティと第2のエンティティと関係とを含む知識グラフ内のリンクを決定するための装置及びコンピュータ実装された方法を提供する。
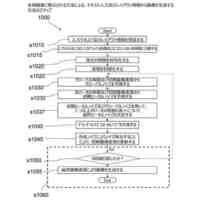
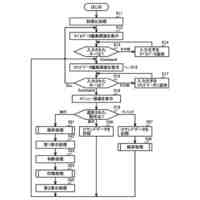
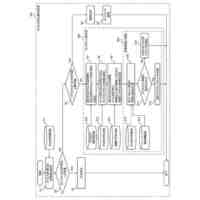
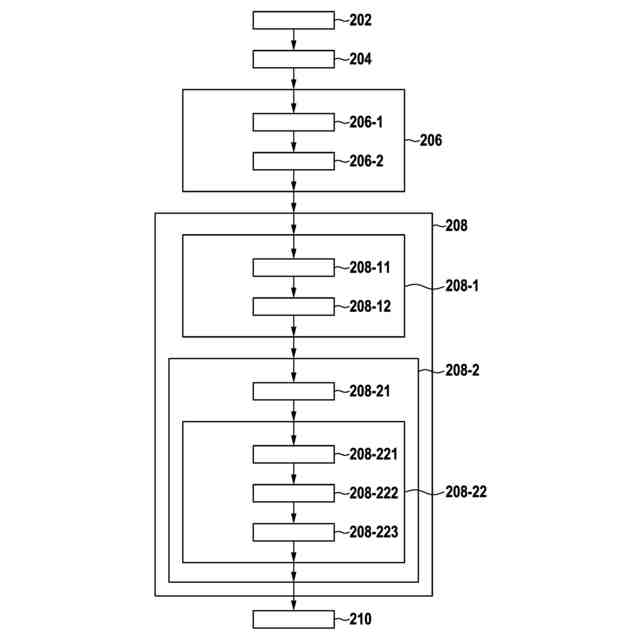
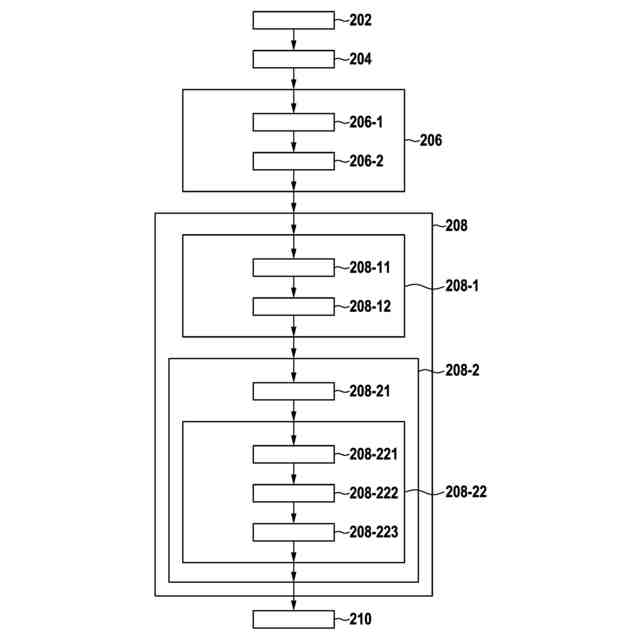
【解決手段】方法は、第1のエンティティの埋め込みを表す1の表現を決定すること206と、知識グラフのエンティティの埋め込みの表現の集合から第2のエンティティの埋め込みを表す第2の表現を選択すること208と、を含む。第2の表現を選択することは、第2の表現についての予測を決定すること208-1と、第2の表現についての予測に依存して第2の表現を選択すること208-2と、を含む。方法はまた、第1のエンティティと第2のエンティティと関係とが含まれるリンクを決定すること210を含み、第1の表現は、双曲空間内、特に2次元双曲空間内の多次元ベクトル、特に2次元ベクトルを含む。
【選択図】図2
特許請求の範囲
【請求項1】
知識グラフ内のリンクを決定するためのコンピュータ実装された方法であって、
前記リンクは、第1のエンティティと、第2のエンティティと、関係とを含む、
方法において、
前記方法は、第1の表現を決定すること(206)であって、前記第1の表現は、前記第1のエンティティの埋め込みを表す、こと(206)を含み、
前記方法は、前記知識グラフのエンティティの埋め込みの表現の集合から第2の表現を選択すること(208)であって、前記第2の表現は、前記第2のエンティティの埋め込みを表す、こと(208)を含み、
前記第2の表現を選択すること(208)は、前記第2の表現についての予測を決定すること(208-1)と、前記第2の表現についての前記予測に依存して前記第2の表現を選択すること(208-2)とを含み、
前記方法は、前記第1のエンティティと、前記第2のエンティティと、前記関係とが含まれる前記リンクを決定すること(210)を含み、
前記第1の表現は、双曲空間内、特に2次元双曲空間内の多次元ベクトル、特に2次元ベクトルを含み、
前記第1の表現を決定すること(206)は、前記第1のエンティティの埋め込みを多次元ベクトルの第1の集合に分割すること(206-1)と、前記第1の集合のベクトルを、前記関係に依存して前記第1の表現の多次元ベクトルにマッピングすること(206-2)とを含み、
前記第2の表現についての前記予測を決定すること(208-1)は、前記関係に依存して前記双曲空間内の前記多次元ベクトルを回転させること(208-11)及び並進させること(208-12)を含む
ことを特徴とする、方法。
続きを表示(約 1,600 文字)
【請求項2】
前記第2の表現についての前記予測は、前記双曲空間内の多次元ベクトル、特に2次元ベクトルを含み、
前記第2の表現は、前記双曲空間内の多次元ベクトル、特に2次元ベクトルを含み、
前記第2の表現を選択すること(208-2)は、
同一の双曲空間内に存在する、前記第2の表現の前記多次元ベクトルと、前記第2の表現についての前記予測の前記多次元ベクトルとの間の差を決定すること(208-21)と、
前記差に依存して距離を決定すること(208-22)と、
前記距離に依存して前記第2の表現を選択すること(208-23)と、
を含む、
請求項1に記載の方法。
【請求項3】
前記距離を決定すること(208-22)は、
前記第2の表現についての前記予測の前記多次元ベクトルを連結すること(208-221)と、
前記第2の表現の前記多次元ベクトルを連結すること(208-222)と、
前記第2の表現についての前記予測の連結された多次元ベクトルに依存して、かつ、前記第2の表現の連結された多次元ベクトルに依存して前記距離を決定すること(208-223)と、
を含む、
請求項2に記載の方法。
【請求項4】
前記第1の表現を決定すること(206-1)は、前記第1の集合のベクトルをそれぞれ異なる双曲空間にマッピングすること(206-2)を含む、
請求項1乃至3のいずれか一項に記載の方法。
【請求項5】
複数の双曲空間のうちの少なくとも1つの双曲空間の曲率が、前記関係によって定義される、
請求項1乃至4のいずれか一項に記載の方法。
【請求項6】
複数の双曲空間のうちの少なくとも1つの双曲空間における回転の程度が、前記関係によって定義される、
請求項1乃至5のいずれか一項に記載の方法。
【請求項7】
複数の双曲空間のうちの少なくとも1つの双曲空間における並進の程度が、前記関係によって定義される、
請求項1乃至6のいずれか一項に記載の方法。
【請求項8】
前記方法は、前記関係を提供すること(204)を含み、
前記関係は、双曲空間ごとに、回転の程度、並進の程度、及び/又は、前記双曲空間の曲率を定義する1つのパラメータを含む、
請求項1乃至7のいずれか一項に記載の方法。
【請求項9】
前記方法は、前記知識グラフのエンティティの埋め込みの表現の集合を決定すること(206)を含み、
前記埋め込みの表現の集合を決定すること(206)は、
それぞれの埋め込みを多次元ベクトルの集合に分割すること(206-1)と、
特に前記関係に依存して、それぞれの集合のベクトルをそれぞれの表現の多次元ベクトルにマッピングすること(206-2)と、
を含む、
請求項1乃至8のいずれか一項に記載の方法。
【請求項10】
前記方法は、
前記関係に依存して前記第1のエンティティを前記第1の表現にマッピングするように、
前記関係に依存して前記第2のエンティティを前記第2の表現にマッピングするように、
前記関係に依存して前記双曲空間内の前記第1の表現を回転及び並進させるように、並びに、
前記第2の表現についての前記予測に依存してかつ前記第2の表現に依存して前記第2のエンティティを決定するように、又は、モデルによって前記第2のエンティティを選択するように、
モデルをトレーニングすることを含む、
請求項1乃至9のいずれか一項に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
背景
本発明は、知識グラフ内のリンクを決定するための装置及びコンピュータ実装された方法に関する。
続きを表示(約 2,100 文字)
【発明の概要】
【発明が解決しようとする課題】
【0002】
発明の開示
独立請求項に記載のコンピュータ実装された方法及び装置は、知識グラフ内における未知のリンクの予測の改良を提供する。
【0003】
知識グラフとは、ファクトを、共通して3つ組(先頭エンティティh、関係r、及び、末尾エンティティt)の形態で表すマルチリレーショナルグラフである。知識グラフ埋め込みとは、リンク予測を介して距離空間又はニューラルネットワークにおいて知識グラフを数値的に表したものであり、これにより、問い合わせ応答、エンティティ分類のような多くの下流のタスクに対して強力な機械学習を活用する可能性が可能となる。双曲空間内の知識グラフ埋め込みは、低次元の埋め込み空間内においても非常に良好な性能を達成することができる。
【課題を解決するための手段】
【0004】
知識グラフ内のリンクを決定するためのコンピュータ実装された方法は、リンクが、第1のエンティティと、第2のエンティティと、関係とを含み、本方法は、第1の表現を決定することであって、第1の表現は、第1のエンティティの埋め込みを表す、ことを含み、本方法は、知識グラフのエンティティの埋め込みの表現の集合から第2の表現を選択することであって、第2の表現は、第2のエンティティの埋め込みを表す、ことを含み、第2の表現を選択することは、第2の表現についての予測を決定することと、第2の表現についての予測に依存して第2の表現を選択することとを含み、本方法は、第1のエンティティと、第2のエンティティと、関係とが含まれるリンクを決定することを含み、第1の表現は、双曲空間内、特に2次元双曲空間内の多次元ベクトル、特に2次元ベクトルを含み、第1の表現を決定することは、第1のエンティティの埋め込みを多次元ベクトルの第1の集合に分割することと、第1の集合のベクトルを、関係に依存して第1の表現の多次元ベクトルにマッピングすることとを含み、第2の表現についての予測を決定することは、関係に依存して双曲空間内の多次元ベクトルを回転させること及び並進させることを含む。本方法は、トレーニングにおいて未知の3つ組に対して、トレーニングデータにおいて不十分に表現されているエンティティに対して、及び、トレーニングデータにおいて不十分に表現されている関係に対して、多種多様な外挿を提供する。本方法は、低次元空間内におけるリンク予測を改良する。本方法は、強力な合成を支援する。
【0005】
リンクは、先頭エンティティすなわち第1のエンティティと、末尾エンティティすなわち第2のエンティティとを含む。本方法は、多様体Mにおける先頭エンティティの埋め込みを、直積空間Pの成分空間内のサブベクトルに分解し、これらのサブベクトルに対して、それぞれの関係ごとに特有である並進及び回転を実施して、第2の表現についての予測を決定する。第2の表現は、結果的に生じた、並進及び回転させられたサブベクトルに基づいて選択される。
【0006】
いくつかの実施形態においては、第2の表現についての予測は、双曲空間内の多次元ベクトル、特に2次元ベクトルを含み、第2の表現は、双曲空間内の多次元ベクトル、特に2次元ベクトルを含み、第2の表現を選択することは、同一の双曲空間内に存在する、第2の表現の多次元ベクトルと、第2の表現についての予測の多次元ベクトルとの間の差を決定することと、差に依存して距離を決定することと、距離に依存して第2の表現を選択することとを含む。距離は、並進及び回転させられたサブベクトルに依存して決定される。第2の表現は、所与のグラウンドトゥルースであるものとしてもよいし、又は、埋め込み若しくは第2のエンティティに依存して決定されるものとしてもよい。
【0007】
いくつかの実施形態においては、距離を決定することは、第2の表現についての予測の多次元ベクトルを連結することと、第2の表現の多次元ベクトルを連結することと、第2の表現についての予測の連結された多次元ベクトルに依存して、かつ、第2の表現の連結された多次元ベクトルに依存して距離を決定することとを含む。例えば、並進及び回転させられたサブベクトルが連結され、第2のエンティティの埋め込みを表す連結されたベクトルまでの距離が決定される。
【0008】
いくつかの実施形態においては、第1の表現を決定することは、第1の集合のベクトルをそれぞれ異なる双曲空間にマッピングすることを含む。
【0009】
いくつかの実施形態においては、複数の双曲空間のうちの少なくとも1つの双曲空間の曲率が、関係によって定義される。このことはつまり、曲率が、学習可能なパラメータであるということを意味する。
【0010】
いくつかの実施形態においては、複数の双曲空間のうちの少なくとも1つの双曲空間における回転の程度が、関係によって定義される。このことはつまり、回転の程度が、学習可能なパラメータであるということを意味する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非正規コート
12日前
個人
人物再現システム
9日前
個人
AI飲食最適化プラグイン
2日前
有限会社ノア
データ読取装置
10日前
個人
電話管理システム及び管理方法
3日前
個人
広告提供システムおよびその方法
12日前
株式会社ザメディア
出席管理システム
17日前
個人
日誌作成支援システム
9日前
トヨタ自動車株式会社
工程計画装置
17日前
株式会社タクテック
商品取出集品システム
16日前
トヨタ自動車株式会社
作業判定方法
18日前
個人
ポイント還元付き配送システム
10日前
ミサワホーム株式会社
情報処理装置
16日前
オベック実業株式会社
接続構造
9日前
トヨタ自動車株式会社
情報処理システム
18日前
ゼネラル株式会社
RFIDタグ付き物品
19日前
株式会社村田製作所
動き検知装置
16日前
株式会社ドクター中松創研
生成AIの適切使用法
9日前
株式会社実身美
ワーキングシェアリングシステム
10日前
株式会社国際電気
支援システム
19日前
個人
コンテンツ配信システム
16日前
トヨタ自動車株式会社
情報処理方法
18日前
富士通株式会社
画像生成方法
22日前
株式会社エスシーシー
置き配システム
10日前
ブラザー工業株式会社
ラベルプリンタ
18日前
個人
プラットフォームシステム
16日前
トヨタ自動車株式会社
作業支援システム
16日前
個人
注文管理システム及び注文管理プログラム
9日前
株式会社K-model
運用設計資料作成装置
12日前
株式会社 喜・扇
緊急事態対応円滑化システム
9日前
株式会社知財事業研究所
運行計画作成システム
16日前
株式会社半導体エネルギー研究所
文章校正支援システム
2日前
日立建機株式会社
潤滑油診断システム
17日前
日立建機株式会社
作業機械の管理装置
19日前
株式会社マーケットヴィジョン
情報処理システム
9日前
株式会社日立製作所
設計支援装置
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ