TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024166875
公報種別
公開特許公報(A)
公開日
2024-11-29
出願番号
2023083269
出願日
2023-05-19
発明の名称
自律走行車両制御システムおよび自律走行車両制御方法
出願人
大成建設株式会社
代理人
園田・小林弁理士法人
主分類
G05D
1/43 20240101AFI20241122BHJP(制御;調整)
要約
【課題】自律走行ロボットを走行させることなく、進入禁止領域を更新し、障害物への接触リスクを低減する。
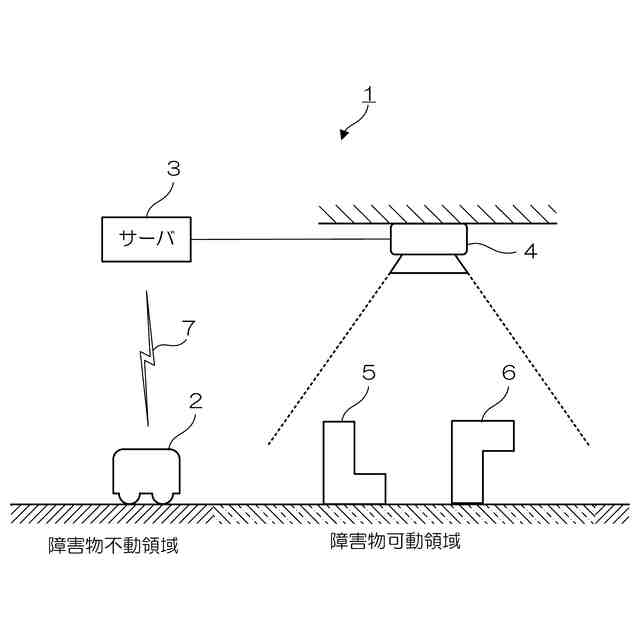
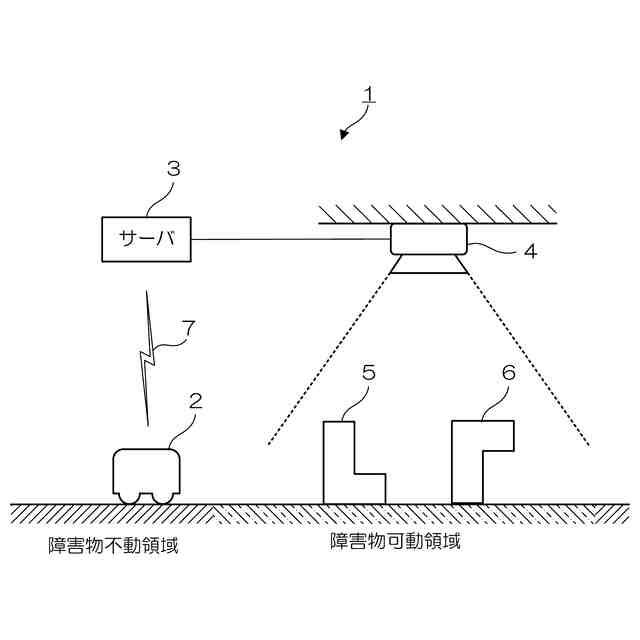
【解決手段】カメラ4は、ロボット稼働エリアの天井に設置されており、天井から床方向に向けて、障害物可動領域の平面化画像を撮影する。サーバ3は、カメラ4によって撮影された障害物可動領域の平面化画像から、障害物可動領域内の障害物5、6を特定し、障害物5、6を包含する進入禁止領域を設定した環境地図を作成し、自律走行ロボット2に提供する。自律走行ロボット2は、最新の進入禁止領域が設定された環境地図に基づいて、進入禁止領域に入らないように、各種センサで周囲の状況(障害物)を検知しながら障害物可動領域内を走行する。
【選択図】図1
特許請求の範囲
【請求項1】
障害物を含む走行環境を俯瞰して撮影する撮像装置と、
所定のタイミングで、前記撮像装置が撮影した前記走行環境の平面化画像を取得し、前記平面化画像から前記走行環境内の障害物を特定し、前記特定した障害物を包含する進入禁止領域を設定した環境地図を作成するサーバと、
前記進入禁止領域が設定された前記環境地図に基づいて、前記走行環境を走行する走行車両と、
を備えることを特徴とする自律走行車両制御システム。
続きを表示(約 570 文字)
【請求項2】
前記所定のタイミングは、
前記走行車両が前記走行環境に差し掛かった時点である、
ことを特徴とする請求項1に記載の自律走行車両制御システム。
【請求項3】
前記所定のタイミングは、
所定の時間周期である、
ことを特徴とする請求項1又は2に記載の自律走行車両制御システム。
【請求項4】
前記サーバは、
前記進入禁止領域を設定する際に、前記障害物の周囲に境界領域を設定し、前記境界領域を包含するように前記進入禁止領域を設定し、
前記境界領域のサイズは、前記走行車両の個体差に応じて設定される、
ことを特徴とする請求項1に記載の自律走行車両制御システム。
【請求項5】
撮像装置によって障害物を含む走行環境を俯瞰して撮影すること、
所定のタイミングで、前記撮像装置が撮影した前記走行環境の平面化画像を取得すること、
前記平面化画像から前記走行環境内の障害物を特定すること、
前記特定した障害物を包含する進入禁止領域を設定した環境地図を作成すること、
前記進入禁止領域が設定された前記環境地図に基づいて、走行車両を走行させること、
を含むことを特徴とする自律走行車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行車両制御システムおよび自律走行車両制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、居住空間または商業施設で稼働するサービスロボット(以下、自律走行ロボットという)がある。自律走行ロボットは、各種センサにより障害物を検知し、障害物との接触を避けて走行するように制御されるが、障害物の形状または材質によっては各種センサで正しく検知ができず、自律走行ロボットが走行中に障害物が接触してしまうことがある。検知の難しい障害物の例としては、ガラス材質またはメッシュ状のもの、鉛直方向の断面形状が複雑なもの、脚の細いテーブルまたは椅子等が挙げられる。一般的に、自律走行ロボットの走行する領域内にこれらの検知が難しい障害物が存在する場合の対処としては、自律走行用の環境地図上で障害物が存在する場所に対して進入禁止領域を設定することがある。これにより、自律走行ロボットは、進入禁止領域を走行しないように制御されるため、自律走行ロボットが障害物を検知することができなかったとしても障害物との接触を回避できる。
しかしながら、障害物の周囲に対して進入禁止領域を設定したとしても、障害物が移動してしまった場合、あるいは障害物の数の増減があった場合には、進入禁止領域を再設定する必要がある。特に、自律走行ロボットの走行する領域が居住空間である場合には、障害物が移動するおそれが高い。
【先行技術文献】
【特許文献】
【0003】
特開2020-184148号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば、特許文献1では、鉛直方向の断面形状が複雑な障害物である棚を対象に、その周囲に進入禁止領域を設定し、自律走行ロボットと障害物との接触リスクを低減させる例が示されている。特許文献1では、棚に対して正しく進入禁止領域を設定するために、センサを多数搭載した自律走行ロボットを棚の付近を走行させることで、その棚の外形を取得し、その外形をもとに進入禁止領域を設定している。
自律走行ロボットの走行する領域が居住空間であった場合には、特許文献1では進入禁止領域を更新するため、その都度、自律走行ロボットを、自律走行ロボットの走行する領域を走行させる必要がある。また、その自律走行ロボットはセンサを多数搭載した自律走行ロボットである必要がある。
【0005】
本発明の目的は、自律走行ロボットの走行する領域内に設置されている障害物、特に自律走行ロボットで検知が困難な障害物が移動する環境において、進入禁止領域を更新するために自律走行ロボットを走行させる必要がなく、自律走行ロボット自身のセンサ構成または性能を制限せずに進入禁止領域を更新し、障害物への接触リスクを低減することができる自律走行車両制御システムおよび自律走行車両制御方法を提供することである。
【課題を解決するための手段】
【0006】
本発明は、上記課題を解決するため、以下の手段を採用する。
すなわち、本発明の自律走行車両制御システムは、障害物を含む走行環境を俯瞰して撮影する撮像装置と、所定のタイミングで、前記撮像装置が撮影した前記走行環境の平面化画像を取得し、前記平面化画像から前記走行環境内の障害物を特定し、前記特定した障害物を包含する進入禁止領域を設定した環境地図を作成するサーバと、前記進入禁止領域が設定された前記環境地図に基づいて、前記走行環境を走行する走行車両と、を備えることを特徴とする。
【0007】
また、本発明の自律走行車両制御方法は、撮像装置によって障害物を含む走行環境を俯瞰して撮影すること、所定のタイミングで、前記撮像装置が撮影した前記走行環境の平面化画像を取得すること、前記平面化画像から前記走行環境内の障害物を特定すること、前記特定した障害物を包含する進入禁止領域を設定した環境地図を作成すること、前記進入禁止領域が設定された前記環境地図に基づいて、走行車両を走行させること、を含むことを特徴とする。
【発明の効果】
【0008】
本発明によれば、自律走行ロボットの走行する領域内に設置されている障害物、特に自律走行ロボットで検知が困難な障害物が移動する環境において、進入禁止領域を更新するために自律走行ロボットを走行させる必要がなく、自律走行ロボット自身のセンサ構成または性能を制限せずに進入禁止領域を更新し、障害物への接触リスクを低減することができる自律走行車両制御システムおよび自律走行車両制御方法を提供することが可能となる。
【図面の簡単な説明】
【0009】
本発明の実施形態による自律走行車両制御システム1の構成を示す模式図である。
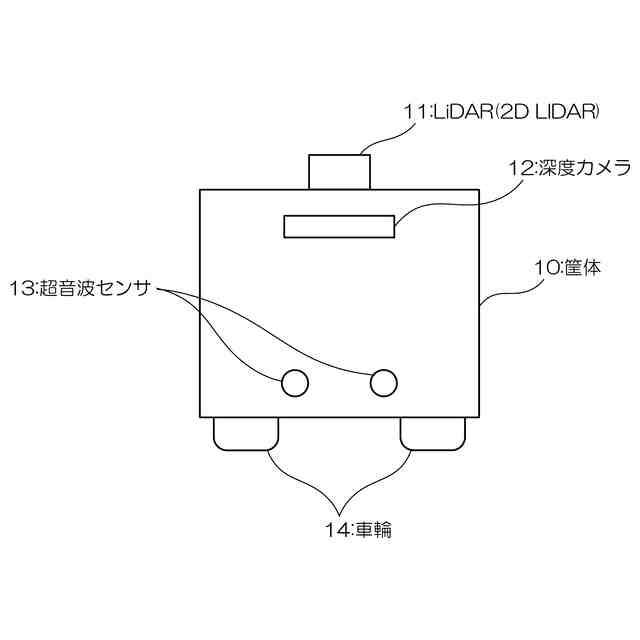
本実施形態による自律走行ロボット2の外観の一例を示す模式図である。
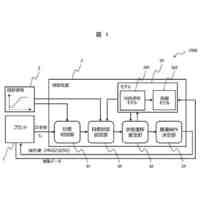
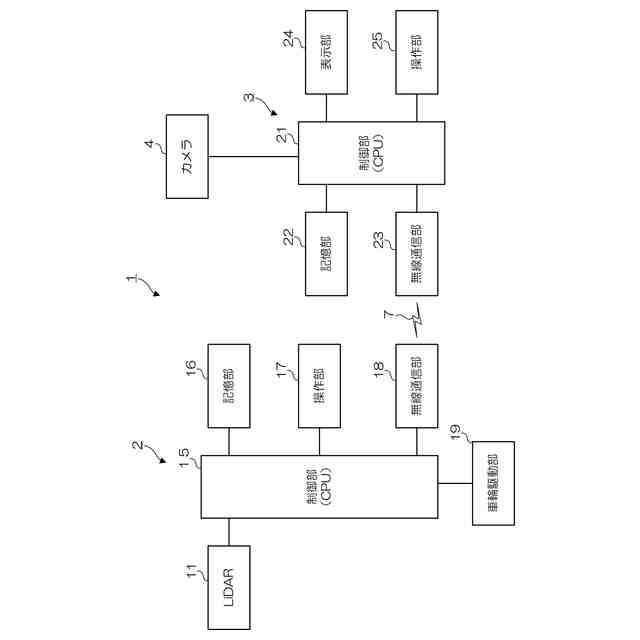
本実施形態による自律走行車両制御システム1の構成を示すブロック図である。
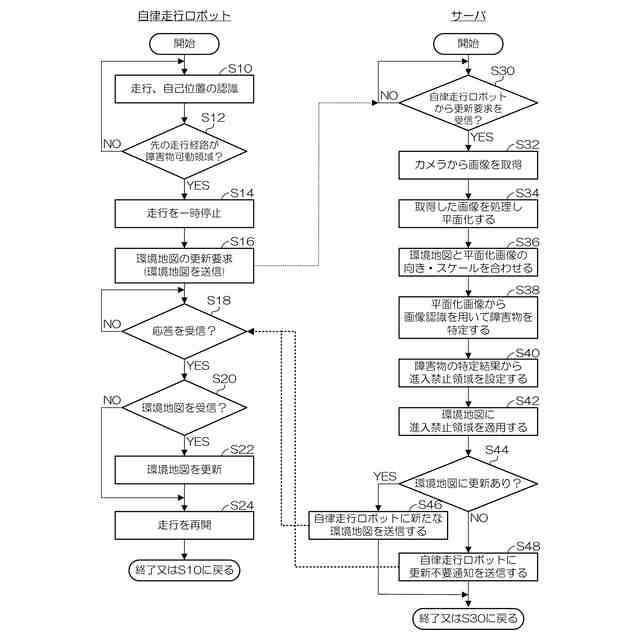
本実施形態による自律走行車両制御システム1の動作を説明するためのフローチャートである。
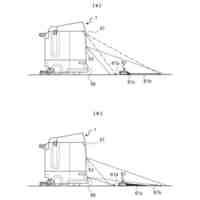
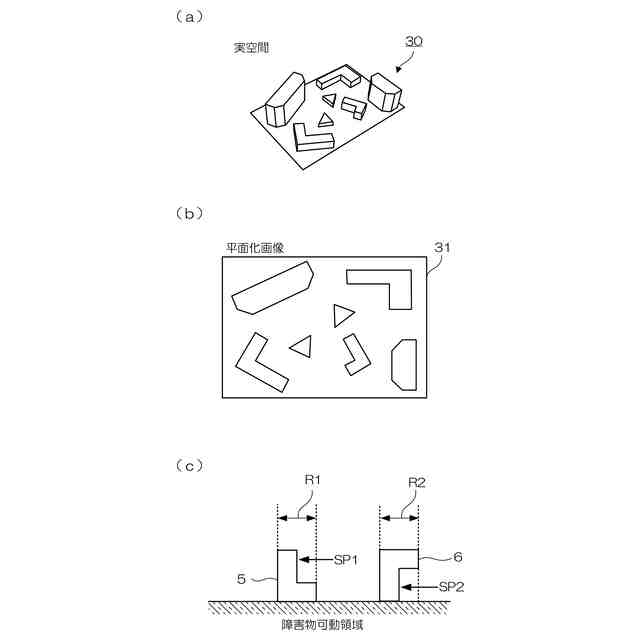
本実施形態による実空間と平面化画像を説明する概念図である。
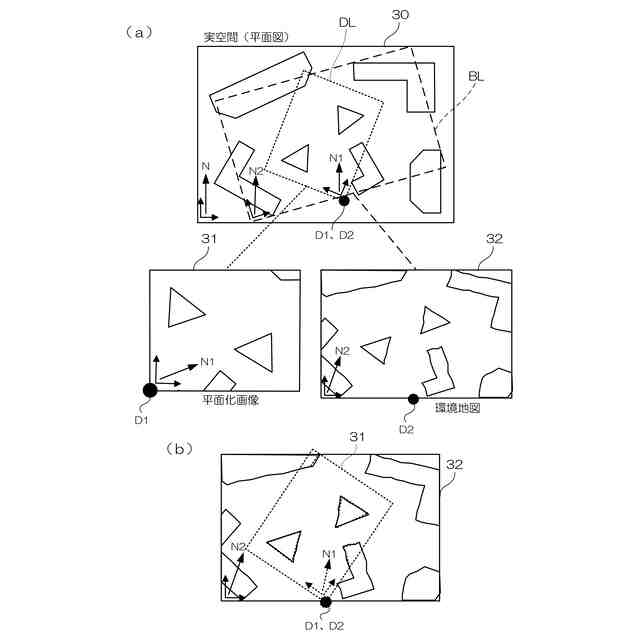
本実施形態による環境地図と平面化画像の向き・スケールの合わせ方法を説明するための概念図である。
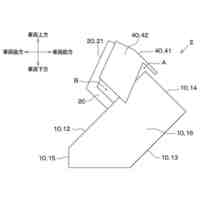
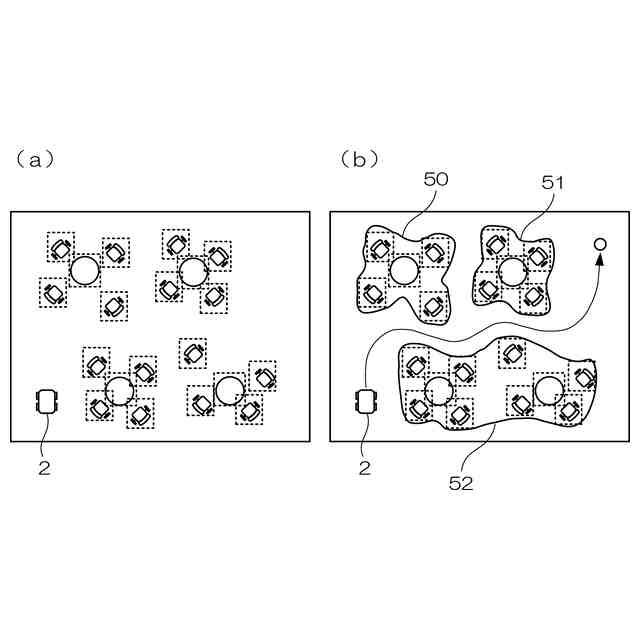
本実施形態による障害物の特定および進入禁止領域の設定方法を説明するための概念図である。
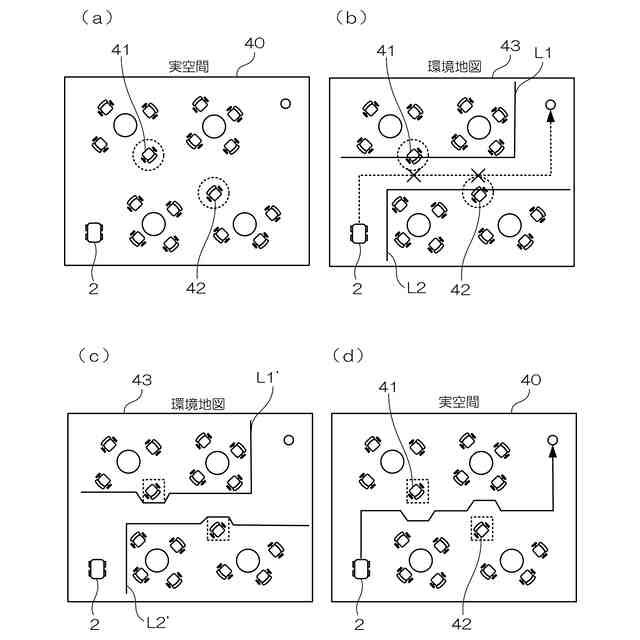
本実施形態による障害物可動領域で移動された椅子41、42の境界領域設定方法を説明するための概念図である。
実施形態による進入禁止領域の他の設定方法について説明するための概念図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して、本発明による自律走行ロボット制御システムの形態について、図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
12日前
ugo株式会社
移動体
12日前
積水樹脂株式会社
磁性シート
1か月前
個人
車両レバー操作装置
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
トヨタ自動車株式会社
自律移動体
11日前
エイブリック株式会社
基準電圧回路装置
1か月前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
搬送システム
1か月前
トヨタ自動車株式会社
搬送ロボット
25日前
株式会社ダイフク
搬送設備
4日前
トヨタ自動車株式会社
位置推定システム
11日前
トヨタ自動車株式会社
自律移動システム
11日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社FUJI
工作機械の操作システム
18日前
株式会社栗本鐵工所
操作装置
26日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
25日前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
1か月前
株式会社豊田自動織機
移動体制御システム
1か月前
本田技研工業株式会社
運転補助装置
1か月前
横河電機株式会社
モジュール
1か月前
東レエンジニアリング株式会社
位置決め装置
1か月前
株式会社日立製作所
制御装置、制御方法
1か月前
日本信号株式会社
自律走行ロボットシステム
1か月前
愛知製鋼株式会社
異常検知方法及び異常検知システム
1か月前
愛知製鋼株式会社
異常検知方法及び異常検知システム
1か月前
株式会社NTTドコモ
総括制御装置
1か月前
NTN株式会社
自動搬送車の誘導システム
1か月前
株式会社デンソー
ペダル装置
25日前
アルプスアルパイン株式会社
回転操作装置
12日前
ローム株式会社
カレントミラー回路
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ