TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024166839
公報種別
公開特許公報(A)
公開日
2024-11-29
出願番号
2023083219
出願日
2023-05-19
発明の名称
搬送ロボット用移動ライン検査方法
出願人
株式会社フジタ
代理人
弁理士法人高橋・林アンドパートナーズ
主分類
G05D
1/43 20240101AFI20241122BHJP(制御;調整)
要約
【課題】搬送ロボットの走行不良による作業トラブルを事前に防ぐこと。
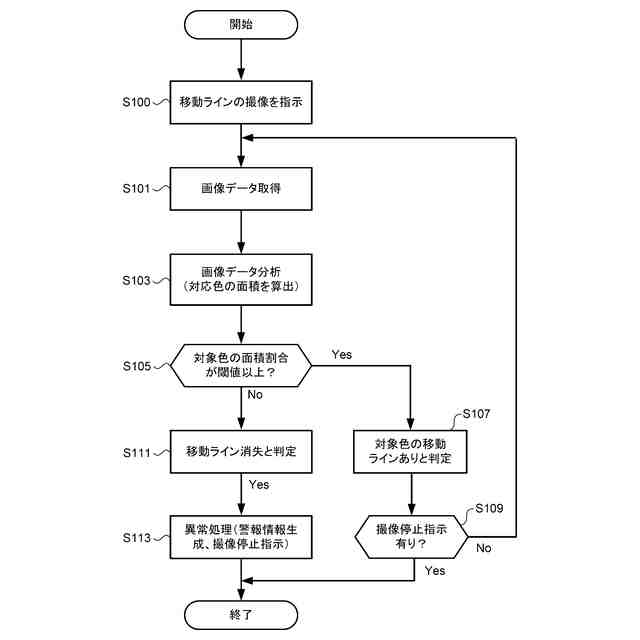
【解決手段】搬送ロボット用移動ライン検査方法は、コンピュータが作業現場に形成され搬送ロボットが移動する経路をガイドする少なくとも一つの移動ラインを含む画像を、前記搬送用ロボットに設けられた撮像部に撮像させ、撮像された前記画像が所定の条件を満たすときに警告情報を生成することを含む。上記搬送ロボット用移動ライン検査方法において、前記所定の条件は、前記画像に含まれる移動ラインに対応する面積の割合が閾値を下回ることであってもよい。
【選択図】図1
特許請求の範囲
【請求項1】
コンピュータが、
作業現場に形成され搬送ロボットの移動をガイドする少なくとも一つの移動ラインを含む画像を、前記搬送ロボットに設けられた撮像部に撮像させ、
撮像された前記画像が所定の条件を満たすときに警告情報を生成することを含む、
搬送ロボット用移動ライン検査方法。
続きを表示(約 600 文字)
【請求項2】
前記所定の条件は、前記画像に含まれる移動ラインに対応する面積の割合が閾値を下回ることである、
請求項1に記載の搬送ロボット用移動ライン検査方法。
【請求項3】
前記面積を算出するときに、前記画像のうちHSV値、RGB値、HSB値、YCBCR値、YUV値のいずれか一つによりあらかじめ設定された第1色に対応する部分を計測する、
請求項2に記載の搬送ロボット用移動ライン検査方法。
【請求項4】
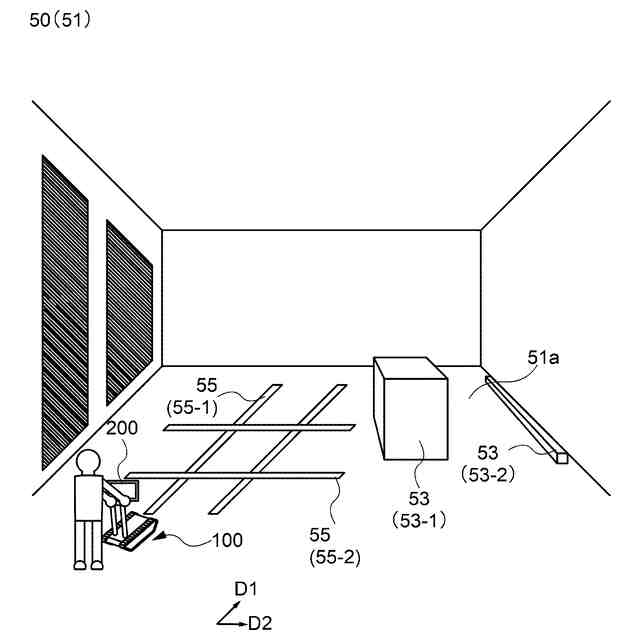
前記少なくとも一つの移動ラインは、搬送用ロボットが移動する第1方向に伸びる第1移動ラインと、前記第1方向と交差する第2方向に伸びる第2移動ラインを含み、
前記第1移動ラインを優先的に検出する、
請求項1に記載の搬送ロボット用移動ライン検査方法。
【請求項5】
前記第1移動ラインと前記第2移動ラインが交差する部分において前記第2移動ラインが形成されているとき、
前記第1移動ライン、および前記第2移動ラインのうち前記交差する部分の合計面積を算出する、
請求項4に記載の搬送ロボット用移動ライン検査方法。
【請求項6】
前記第1移動ラインは、第1色を有し、
前記第2移動ラインは、前記第1色と異なる第2色を有する、
請求項5に記載の搬送ロボット用移動ライン検査方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送ロボット用移動ライン検査方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、自動搬送車(AGV:Automatic Guided Vehicle)の技術開発が進み、さまざまな場面でAGVが利用され始めている。例えば、商品が保管された倉庫でAGVを利用すれば、多種多様な商品を自動で搬送することが可能となる。そのため、作業効率が向上し、コストを削減することができる。このようなAGVとして、特許文献1にはAGVが台車の下に潜り込み、AGVが台車を持ち上げて牽引する技術が開示されている。
【0003】
一方、自動搬送車が台車を持ち上げるためにはパワーを必要とするため、自動搬送車が大型化する。特に、建設現場の資材は重量が大きなものが多く、このような資材を積載した台車を持ち上げるためには、さらなるパワーを必要とし、自動搬送車はさらに大型化することになる。そのため、台車のキャスターを利用し、台車の下方で台車と連結し、台車を牽引することができるライントレース機能および自動追従機能を有する小型の自動搬送ロボットの開発が進められている。ライントレースの場合、作業現場に搬送ロボット専用の移動ライン(導線)を形成し、自動搬送ロボットが移動ラインを認識して目的地まで到達することができる。
【先行技術文献】
【特許文献】
【0004】
特開2019-59460号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、長期にわたり移動ラインを使用すると、移動ラインの色が劣化する、または移動ラインが擦り切れることにより、移動ラインが消失する場合がある。移動ラインが消失してしまうと、ラインを正常に認識(トレース)が出来なくなり走行不能となる場合がある。
【0006】
そこで、本発明は、上記問題に鑑み、搬送ロボットの走行不良による作業トラブルを事前に防ぐことを課題の一つとする。
【課題を解決するための手段】
【0007】
本発明の一実施形態によれば、コンピュータが、作業現場に形成(一例として塗布形成)され搬送ロボットの移動をガイドする少なくとも一つの移動ラインを含む画像を、前記搬送ロボットに設けられた撮像部に撮像させ、撮像された前記画像が所定の条件を満たすときに警告情報を生成することを含む、搬送ロボット用移動ライン検査方法が提供される。
【0008】
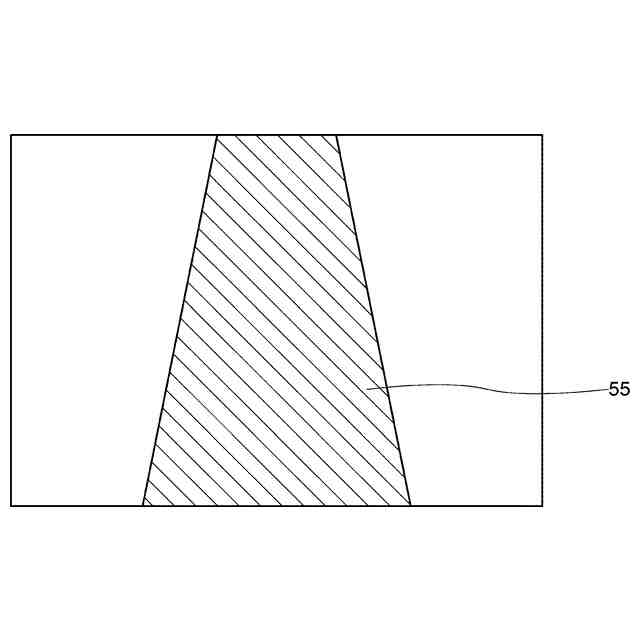
上記搬送ロボット用移動ライン検査方法において、前記所定の条件は、前記画像に含まれる移動ラインに対応する面積の割合が閾値を下回ることであってもよい。
【0009】
上記搬送ロボット用移動ライン検査方法において、前記面積を算出するときに、前記画像のうちHSV値、RGB値、HSB値、YCBCR値、YUV値のいずれか一つによりあらかじめ設定された第1色に対応する部分を計測してもよい。
【0010】
上記搬送ロボット用移動ライン検査方法において、前記少なくとも一つの移動ラインは、搬送用ロボットが移動する第1方向に伸びる第1移動ラインと、前記第1方向と交差する第2方向に伸びる第2移動ラインを含み、前記第1移動ラインを優先的に検出してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
12日前
ugo株式会社
移動体
12日前
積水樹脂株式会社
磁性シート
1か月前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
自動走行体
2か月前
株式会社豊田自動織機
無人走行体
2か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
自律移動体
11日前
株式会社熊谷組
巡回ルート作成装置
1か月前
オムロン株式会社
自律作業システム
2か月前
トヨタ自動車株式会社
搬送ロボット
25日前
トヨタ自動車株式会社
搬送システム
1か月前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
エイブリック株式会社
シャントレギュレータ
2か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
位置推定システム
11日前
株式会社ダイフク
搬送設備
4日前
トヨタ自動車株式会社
自律移動システム
11日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社栗本鐵工所
操作装置
26日前
オムロン株式会社
設計装置および設計方法
2か月前
株式会社FUJI
工作機械の操作システム
18日前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
東芝ライテック株式会社
管理システム
2か月前
株式会社デンソー
電子制御装置
2か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
株式会社デンソー
移動体制御装置
2か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
アズビル株式会社
診断システムおよび診断方法
2か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
25日前
本田技研工業株式会社
運転補助装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ


































