TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024166788
公報種別
公開特許公報(A)
公開日
2024-11-29
出願番号
2023083129
出願日
2023-05-19
発明の名称
駆動力制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/00 20060101AFI20241122BHJP(車両一般)
要約
【課題】駆動輪の駆動力を設定するにあたって、適合作業に必要な工数を削減する。
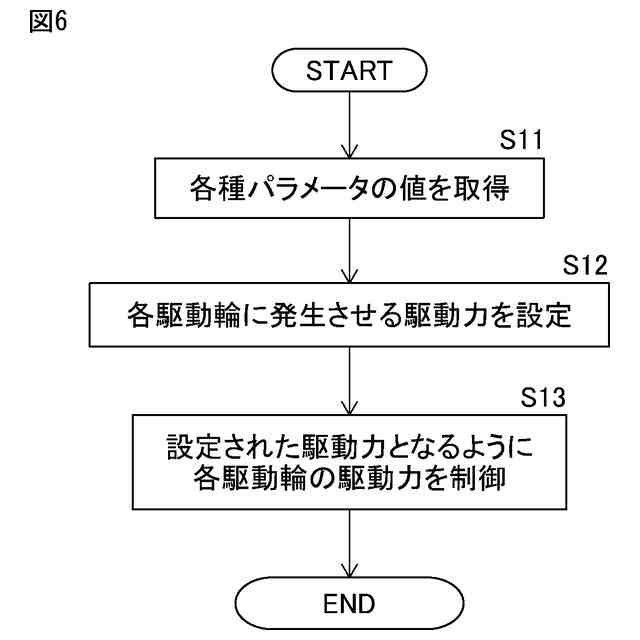
【解決手段】車両10の1対の駆動輪11の駆動力を別々に制御する、駆動力制御装置は、車両の操舵角、各車輪の速度、及び車両の速度、の検出値又は推定値を取得する取得部331と、各駆動輪に発生させる駆動力を設定する駆動力設定部332と、設定された駆動力となるように各駆動輪の駆動力を制御する制御部333と、を有する。動力設定部は、取得部によって取得された操舵角及び車両の速度から推定されるドライバ要求ヨーレートに対応する1対の駆動輪の速度差と取得部によって取得された1対の駆動輪の速度の差との差に、各駆動輪のコーナリングスティフネス及びドライビングスティフネスの少なくとも一方に基づく係数を乗算して算出された算出値に基づいて、1対の駆動輪に発生させる駆動力を設定する。
【選択図】図6
特許請求の範囲
【請求項1】
車両の少なくとも1対の駆動輪の駆動力を別々に制御する、駆動力制御装置であって、
前記車両の操舵角、前記駆動輪を含む各車輪の速度、及び前記車両の速度、の検出値又は推定値を取得する取得部と、
各駆動輪に発生させる駆動力を設定する駆動力設定部と、
設定された駆動力となるように各駆動輪の駆動力を制御する制御部と、を有し、
前記駆動力設定部は、前記取得部によって取得された前記操舵角及び前記車両の速度から推定される目標ヨーレートに対応する前記少なくとも1対の駆動輪の速度差と前記取得部によって取得された前記1対の駆動輪の速度の差との差に、各駆動輪のコーナリングスティフネス及びドライビングスティフネスの少なくとも一方に基づく係数を乗算して算出された算出値に基づいて、前記少なくとも1対の駆動輪に発生させる駆動力を設定する、駆動力制御装置。
続きを表示(約 690 文字)
【請求項2】
前記取得部は、各車輪に加わる荷重の検出値又は推定値を更に取得し、
前記駆動力設定部は、ドライバ要求駆動力を前記各車輪に加わる荷重に比例して分配された値と、前記算出値とに基づいて、前記少なくとも1対の駆動輪に発生させる駆動力を設定する、請求項1に記載の駆動力制御装置。
【請求項3】
前記係数は、前記コーナリングスティフネスと前記ドライビングスティフネスとの間の値とされる、請求項1又は2に記載の駆動力制御装置。
【請求項4】
前記ドライビングスティフネスは、前記各車輪に加わる荷重、及びスリップ率に基づいて設定される、請求項1又は2に記載の駆動力制御装置。
【請求項5】
前記駆動力設定部は、以下の式(1)に基づいて各駆動輪の駆動力F
xn
を算出し、
JPEG
2024166788000012.jpg
21
156
前記式(1)において、wは前記車両の重量、w
n
はn番目の駆動輪に加わる荷重、F
d
はドライバによって要求される駆動力、v
wn
はn番目の駆動輪の速度、v
wn’
はn番目の駆動輪と対の駆動輪の速度又は車両の速度、Vは前記車両の速度、tは対の駆動輪間のトレッド、K
n
はn番目の車輪におけるコーナリングスティフネス及びドライビングスティフネスの少なくとも一方に応じて変化する係数、をそれぞれ表す、請求項1又は2に記載の駆動力制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、駆動力制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来から、車両の左右後輪に伝達される駆動力の分配を調整可能な駆動力制御装置が知られている(特許文献1)。特許文献1に記載の駆動力制御装置は、左右後輪の車輪速差が車両の走行状態に応じた目標車輪速差になるように駆動力の配分を制御する第1制御と、車両に発生するヨー運動量が車両の走行状態に応じた目標ヨー運動量になるよう駆動力の配分を制御する第2制御とを行うことができるように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2006-029460号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の制御装置では、第1制御及び第2制御ともに、フィードバック制御が行われている。ここで、フィードバック制御を行うためにはフィードバックゲインを適切な値に設定することが必要になる。しかしながら、特許文献1では適切なフィードバックゲインが理論的に導き出されていないため、フィードバックゲインを適切な値に設定するためには膨大な工数の適合作業が必要になる。
【0005】
上記課題に鑑みて、本開示の目的は、駆動輪の駆動力を設定するにあたって、適合作業に必要な工数を削減することにある。
【課題を解決するための手段】
【0006】
本開示の要旨は以下のとおりである。
【0007】
車両の少なくとも1対の駆動輪の駆動力を別々に制御する、駆動力制御装置であって、
前記車両の操舵角、前記駆動輪を含む各車輪の速度、及び前記車両の速度、の検出値又は推定値を取得する取得部と、
各駆動輪に発生させる駆動力を設定する駆動力設定部と、
設定された駆動力となるように各駆動輪の駆動力を制御する制御部と、を有し、
前記駆動力設定部は、前記取得部によって取得された前記操舵角及び前記車両の速度から推定されるドライバ要求ヨーレートに対応する前記少なくとも1対の駆動輪の速度差と前記取得部によって取得された前記1対の駆動輪の速度の差との差に、各駆動輪のコーナリングスティフネス及びドライビングスティフネスの少なくとも一方に基づく係数を乗算して算出された算出値に基づいて、前記少なくとも1対の駆動輪に発生させる駆動力を設定する、駆動力制御装置。
【発明の効果】
【0008】
本開示によれば、駆動輪の駆動力を設定するにあたって、適合作業に必要な工数を削減することができる。
【図面の簡単な説明】
【0009】
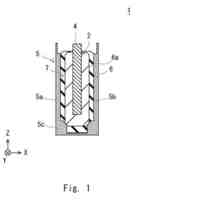
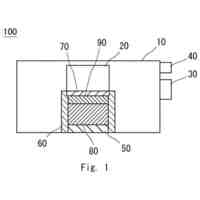
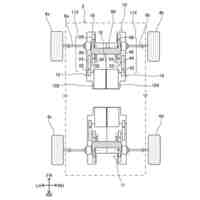
図1は、車両を概略的に示す構成図である。
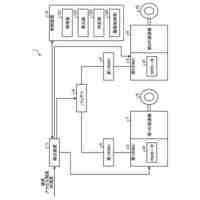
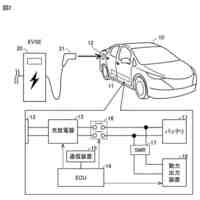
図2は、駆動力制御システムの構成を概略的に示すブロック図である。
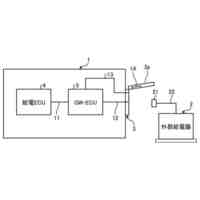
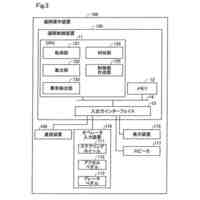
図3は、ECUの構成を概略的に示す構成図である。
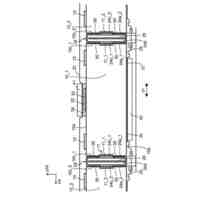
図4は、車両にヨー方向の外乱入力があったときに、各車輪に加わる力を表す図である。
図5は、車両の簡易的なモデルを概略的に示す図である。
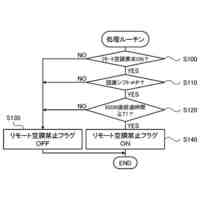
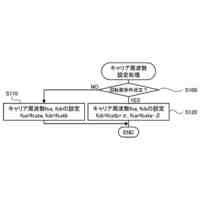
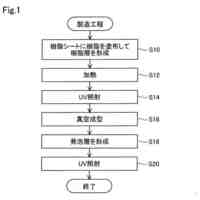
図6は、各駆動輪の駆動力の制御の流れを示すフローチャートである。
図7は、スリップ率と各車輪に加わる荷重と駆動力との関係を表す図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して実施形態について詳細に説明する。なお、以下の説明では、同様な構成要素には同一の参照番号を付す。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電動車
10日前
トヨタ自動車株式会社
ロータ
10日前
トヨタ自動車株式会社
自動車
3日前
トヨタ自動車株式会社
充電器
4日前
トヨタ自動車株式会社
電動車
10日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
電動車両
10日前
トヨタ自動車株式会社
判定装置
5日前
トヨタ自動車株式会社
二次電池
10日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
接合方法
11日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
駆動装置
10日前
トヨタ自動車株式会社
蓄電セル
11日前
トヨタ自動車株式会社
蓄電装置
11日前
トヨタ自動車株式会社
製造方法
4日前
トヨタ自動車株式会社
二次電池
10日前
トヨタ自動車株式会社
駆動装置
10日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
電気自動車
4日前
トヨタ自動車株式会社
電池パック
5日前
トヨタ自動車株式会社
熱管理回路
13日前
トヨタ自動車株式会社
熱管理回路
13日前
トヨタ自動車株式会社
プロテクタ
10日前
トヨタ自動車株式会社
電池パック
5日前
トヨタ自動車株式会社
電池パック
3日前
トヨタ自動車株式会社
電池パック
5日前
トヨタ自動車株式会社
全固体電池
3日前
トヨタ自動車株式会社
遊星歯車機構
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ