TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024165247
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023081275
出願日
2023-05-17
発明の名称
荷物運搬ロボット及びその制御方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20241121BHJP(制御;調整)
要約
【課題】ロボットからの排水を適切に処理できること。
【解決手段】荷物運搬ロボットは、荷物が収納される荷室内で発生する水を貯める貯水部と、貯水部内の水を排水する排水部と、荷物運搬ロボットの走行路の状態を検出する走行路状態検出部と、走行路状態検出部により検出された荷物運搬ロボットの走行路の状態に応じて、排水部を開閉制御する開閉制御部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
荷物が収納される荷室内で発生する水を貯める貯水部と、
前記貯水部内の水を排水する排水部と、
荷物運搬ロボットの走行路の状態を検出する走行路状態検出部と、
前記走行路状態検出部により検出された荷物運搬ロボットの走行路の状態に応じて、前記排水部を開閉制御する開閉制御部と、
を備える荷物運搬ロボット。
続きを表示(約 600 文字)
【請求項2】
請求項1記載の荷物運搬ロボットであって、
前記開閉制御部は、前記荷物運搬ロボットの走行路の状態と、前記荷物又は前記貯水部の状態と、に応じて前記排水部を開閉制御する、荷物運搬ロボット。
【請求項3】
請求項1記載の荷物運搬ロボットであって、
前記開閉制御部は、前記走行路状態検出部により検出された走行路の状態に基づいて、前記荷物運搬ロボットが所定の排水スペースを走行していると判断した場合に、前記排水部を開状態に制御し、前記貯水部内の水を前記排水スペースに排水する、荷物運搬ロボット。
【請求項4】
請求項2記載の荷物運搬ロボットであって、
前記貯水部内の水の量を検出する水量検出部を更に備え、
前記開閉制御部は、前記水量検出部により検出された水の量が所定量以上であると判断した場合に、前記排水部を開状態に制御し、前記貯水部内の水を排水する、荷物運搬ロボット。
【請求項5】
荷物が収納される荷室内で発生する水を貯める貯水部と、
前記貯水部内の水を排水する排水部と、を備える荷物運搬ロボットの制御方法であって、
荷物運搬ロボットの走行路の状態を検出するステップと、
前記検出された荷物運搬ロボットの走行路の状態に応じて、前記排水部を開閉制御するステップと、
を含む制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、荷物を運搬する荷物運搬ロボット及びその制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
車両本体の内部が防水区画と非防水区画に区画されており、非防水区画に排水手段が形成されている移動ロボットが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-079386号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記移動ロボットは、建物の床などに排水してしまうことがある。
本開示は、このような問題点を解決するためになされたものであり、ロボットからの排水を適切に処理できる荷物運搬ロボット及びその制御方法を提供することを主たる目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するための本開示の一態様は、
荷物が収納される荷室内で発生する水を貯める貯水部と、
前記貯水部内の水を排水する排水部と、
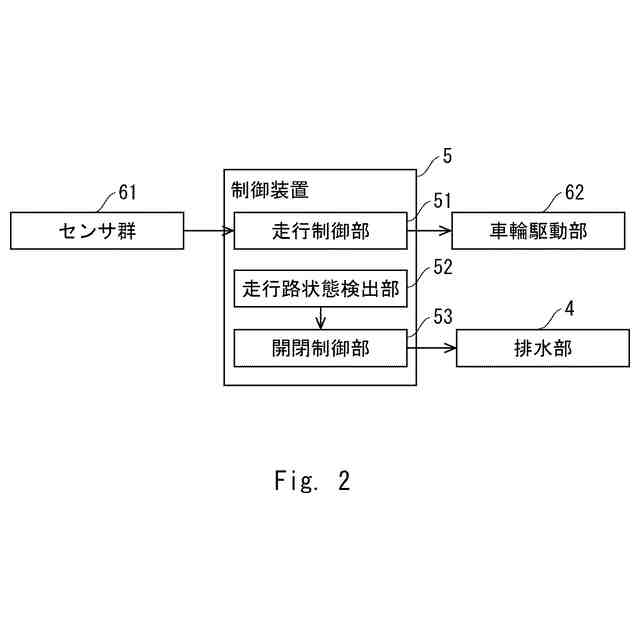
荷物運搬ロボットの走行路の状態を検出する走行路状態検出部と、
前記走行路状態検出部により検出された荷物運搬ロボットの走行路の状態に応じて、前記排水部を開閉制御する開閉制御部と、
を備える荷物運搬ロボット
である。
この一態様において、
前記開閉制御部は、前記荷物運搬ロボットの走行路の状態と、前記荷物又は前記貯水部の状態と、に応じて前記排水部を開閉制御してもよい。
この一態様において、
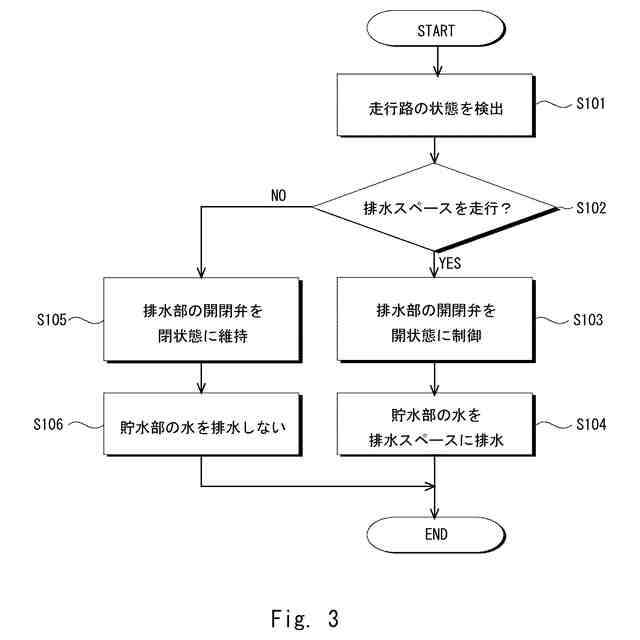
前記開閉制御部は、前記走行路状態検出部により検出された走行路の状態に基づいて、前記荷物運搬ロボットが所定の排水スペースを走行していると判断した場合に、前記排水部を開状態に制御し、前記貯水部内の水を前記排水スペースに排水してもよい。
この一態様において、
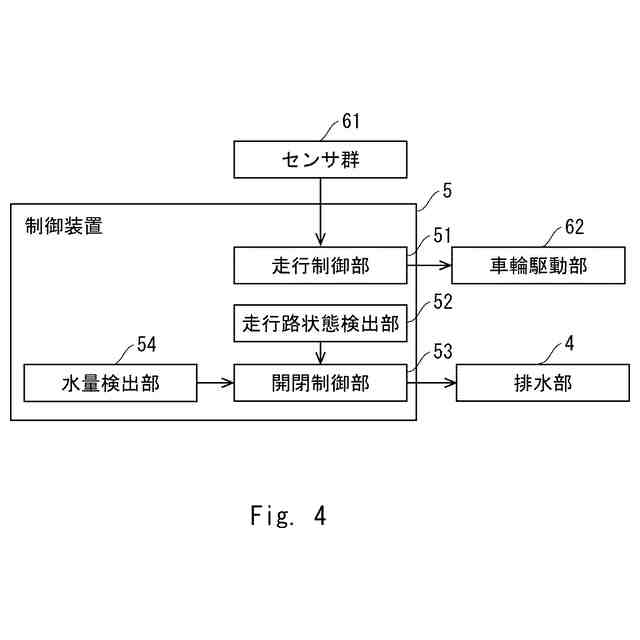
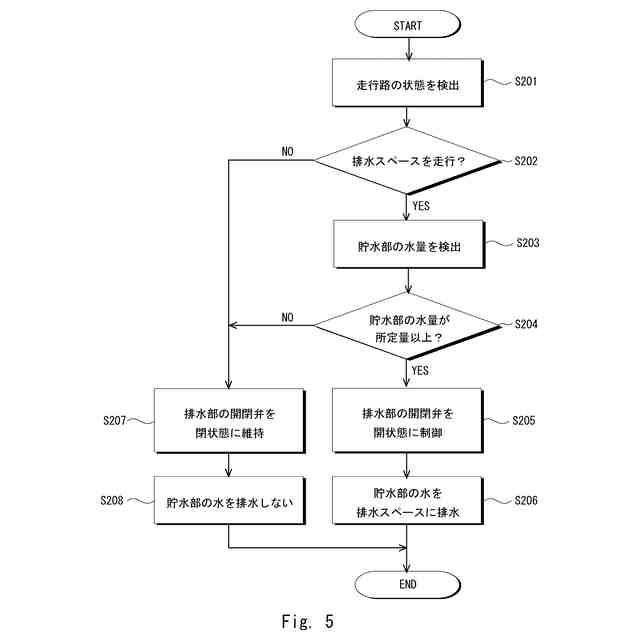
前記貯水部内の水の量を検出する水量検出部を更に備え、
前記開閉制御部は、前記水量検出部により検出された水の量が所定量以上であると判断した場合に、前記排水部を開状態に制御し、前記貯水部内の水を排水してもよい。
上記目的を達成するための本開示の一態様は、
荷物が収納される荷室内で発生する水を貯める貯水部と、
前記貯水部内の水を排水する排水部と、を備える荷物運搬ロボットの制御方法であって、
荷物運搬ロボットの走行路の状態を検出するステップと、
前記検出された荷物運搬ロボットの走行路の状態に応じて、前記排水部を開閉制御するステップと、
を含む制御方法
である。
【発明の効果】
【0006】
本開示によれば、ロボットからの排水を適切に処理できる荷物運搬ロボット及びその制御方法を提供することができる。
【図面の簡単な説明】
【0007】
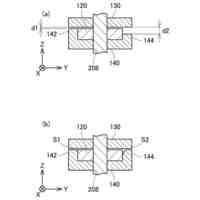
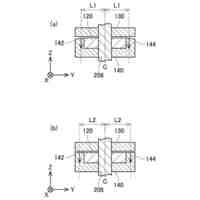
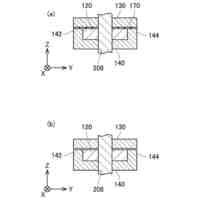
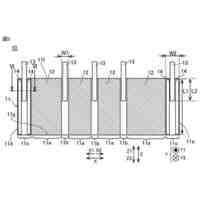
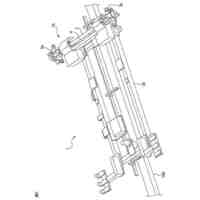
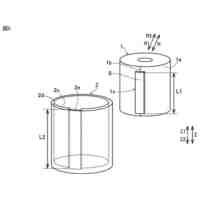
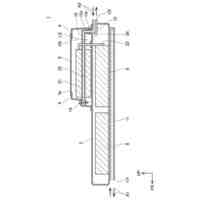
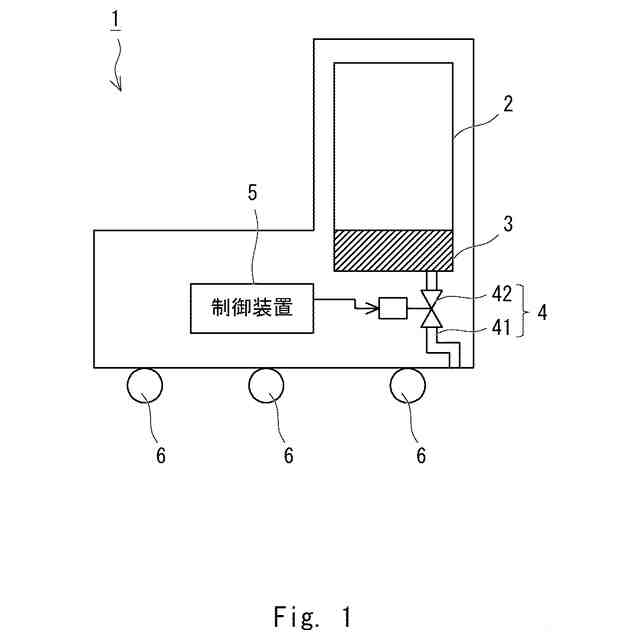
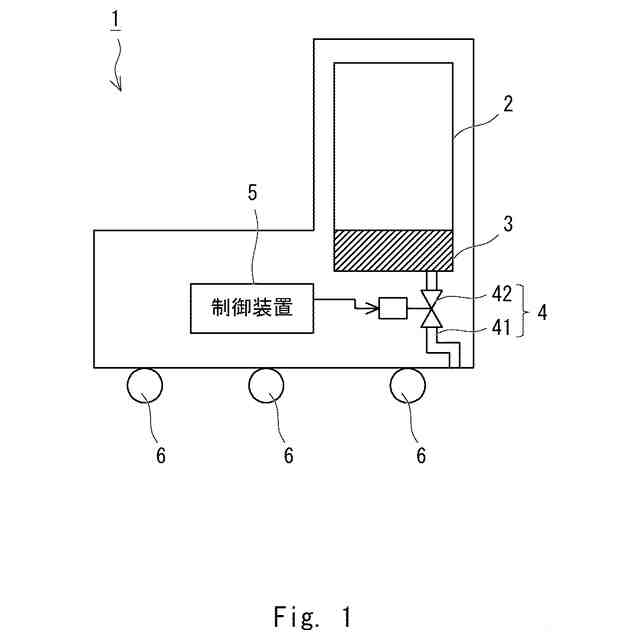
本実施形態に係る荷物運搬ロボットの概略的な構成を示す概略図である。
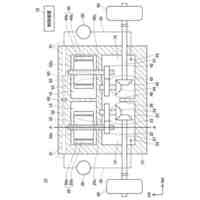
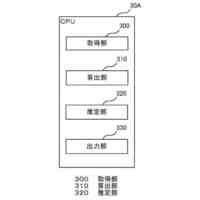
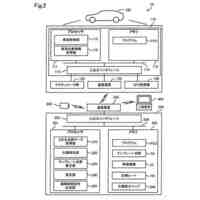
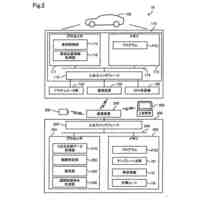
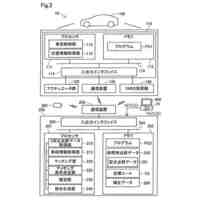
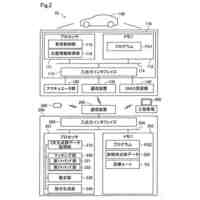
本実施形態に係る制御装置の概略的なシステム構成を示すブロック図である。
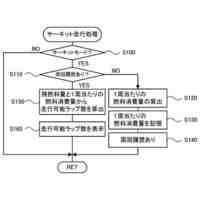
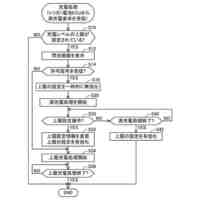
本実施形態に係る荷物運搬ロボットの制御方法のフローの一例を示すフローチャートである。
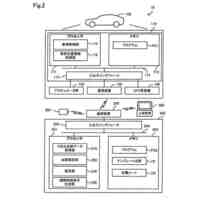
本実施形態に係る制御装置の概略的なシステム構成を示すブロック図である。
本実施形態に係る荷物運搬ロボットの制御方法のフローの一例を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、本実施形態を通じて本発明を説明するが、特許請求の範囲にかかる発明を以下の実施形態に限定するものではない。また、実施形態で説明する構成の全てが課題を解決するための手段として必須であるとは限らない。説明の明確化のため、以下の記載および図面は、適宜、省略、および簡略化がなされている。なお、各図面において、同一の要素には同一の符号が付されており、必要に応じて重複説明は省略されている。
【0009】
実施形態1
以下、図面を参照して本実施形態について説明する。荷物運搬ロボットが荷室内に冷凍品や冷蔵品などの荷物を格納し搬送する場合、荷室内に結露が発生し、その結露水が荷物運搬ロボット内に貯まる。この場合、荷物運搬ロボットは、この結露水を外部に排出する必要があるが、例えば、建物の床などに排水してしまうことがあり問題となり得る。
【0010】
これに対し、本実施形態に係る荷物運搬ロボットは、上述したようなロボットからの排水を適切な場所に排出することで、適切に処理できるものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
リレー
今日
トヨタ自動車株式会社
自動車
今日
トヨタ自動車株式会社
リレー
今日
トヨタ自動車株式会社
リレー
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
製造装置
7日前
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
監視装置
7日前
トヨタ自動車株式会社
二次電池
今日
トヨタ自動車株式会社
内燃機関
1日前
トヨタ自動車株式会社
搬送装置
今日
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
差動装置
今日
トヨタ自動車株式会社
蓄電セル
7日前
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
推定装置
今日
トヨタ自動車株式会社
制御装置
7日前
トヨタ自動車株式会社
二次電池
7日前
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
推定装置
今日
トヨタ自動車株式会社
二次電池
7日前
トヨタ自動車株式会社
電源装置
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
蓄電セル
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ