TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024164121
公報種別
公開特許公報(A)
公開日
2024-11-26
出願番号
2024139505,2024069011
出願日
2024-08-21,2018-12-20
発明の名称
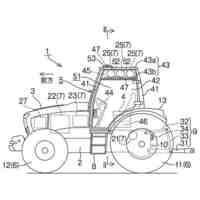
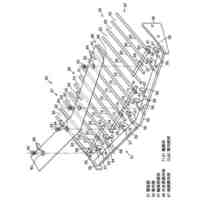
トラクタ
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20241119BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】適切な表示が可能なトラクタを提供する。
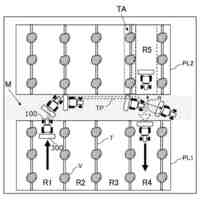
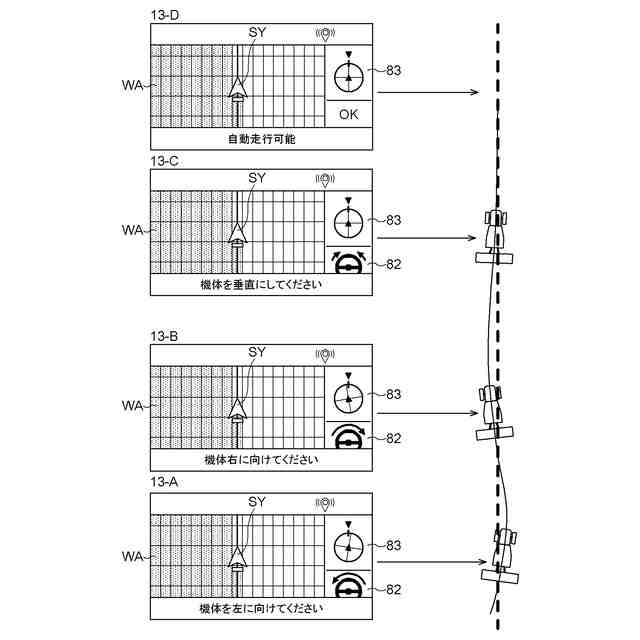
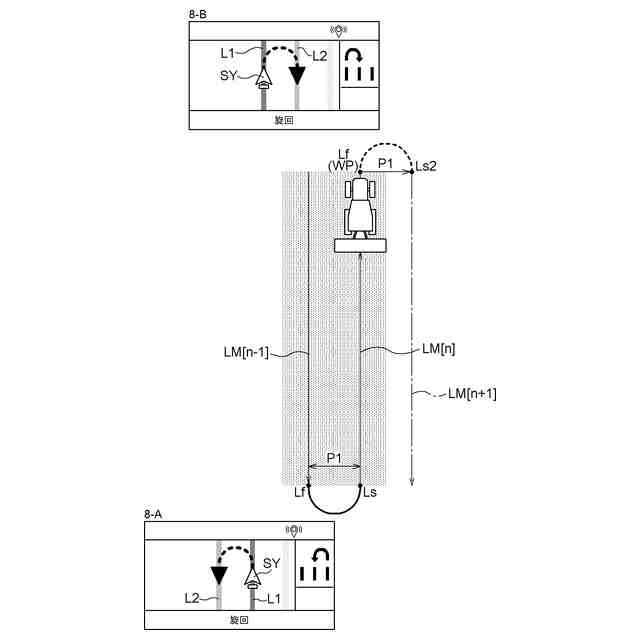
【解決手段】機体が移動中に複数の目標走行経路を表示する表示部を備え、表示部は、複数の目標走行経路のうち、機体が目標走行経路に沿うように移動した後の目標走行経路に対しては、目標走行経路の周囲に移動済みを示す色を着色して表示し、その他の目標走行経路の周囲に対しては、着色とは異なる色で表示し、且つ、複数の目標走行経路を表示する部分の横に円形状の表示83を行うことによって目標走行経路に対する機体の方位のずれを示す。
【選択図】図13
特許請求の範囲
【請求項1】
走行装置が備えられた機体と、
航法衛星の測位信号に基づいて前記機体の位置情報の検出可能な位置検出部と、
前記位置情報の経時的な検出に基づいて前記機体の走行軌跡を取得可能な走行軌跡取得部と、
前記走行軌跡に基づいて目標方位を算定する目標方位算定部と、
前記目標方位に基づいて目標走行経路を生成する目標生成経路設定部と、
前記目標走行経路に沿って前記走行装置の操向を可能な操向制御部と、
前記機体が移動中に複数の前記目標走行経路を表示する表示部と、
を備え、
前記表示部は、前記複数の前記目標走行経路のうち、前記機体が前記目標走行経路に沿うように移動した後の前記目標走行経路に対しては、当該目標走行経路の周囲に移動済みを示す色を着色して表示し、その他の目標走行経路の周囲に対しては、前記着色とは異なる色で表示し、且つ、前記複数の前記目標走行経路を表示する部分の横に円形状の表示を行うことによって前記目標走行経路に対する前記機体の方位のずれを示すトラクタ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トラクタに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
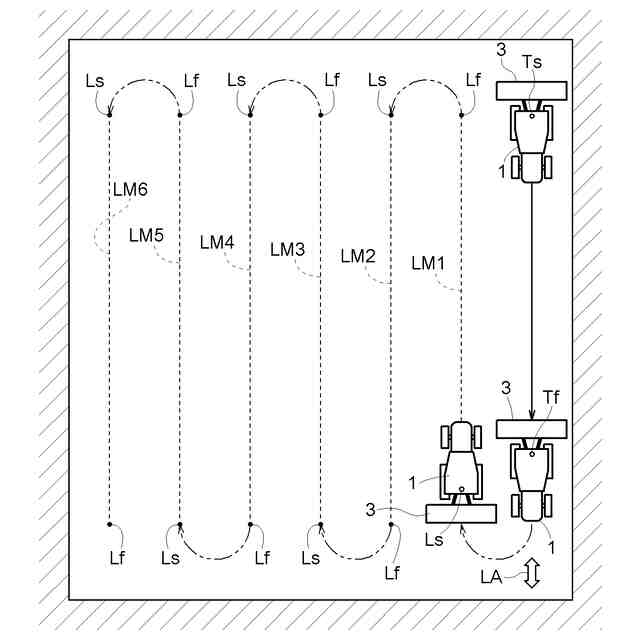
例えば特許文献1に開示された作業車では、衛星測位システムを用いて機体に関する位置情報を取得可能な位置検出部(文献では「受信装置」)と、位置検出部で取得された位置情報に基づいて目標方位に沿って機体の操向制御を可能な操向制御部(文献では「自動操向制御部」)と、が備えられている。また、自動操向制御の基準となる目標方位は、始点を登録する操作具(文献では「始点登録スイッチ」)と、終点を登録する操作具(文献では「終点登録スイッチ」)と、の夫々の操作が行われた際の夫々の位置に基づいて設定される。
【先行技術文献】
【特許文献】
【0003】
特開2018-148858号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された作業車では、始点と終点との登録が、各別かつ専用の操作具によって行われる。この構成であれば、始点と終点との登録の際に、搭乗者が操作具を押し間違える虞があり、その場合には始点及び終点の登録操作が搭乗者にとって煩わしいものとなる。また、操作具が、始点と終点との夫々の設定以外に、他の操作手段としても兼用される構成であれば、操作具の数が削減され、コスト面で有利である。
【0005】
本発明の目的は、適切な表示が可能なトラクタを提供することにある。
【課題を解決するための手段】
【0006】
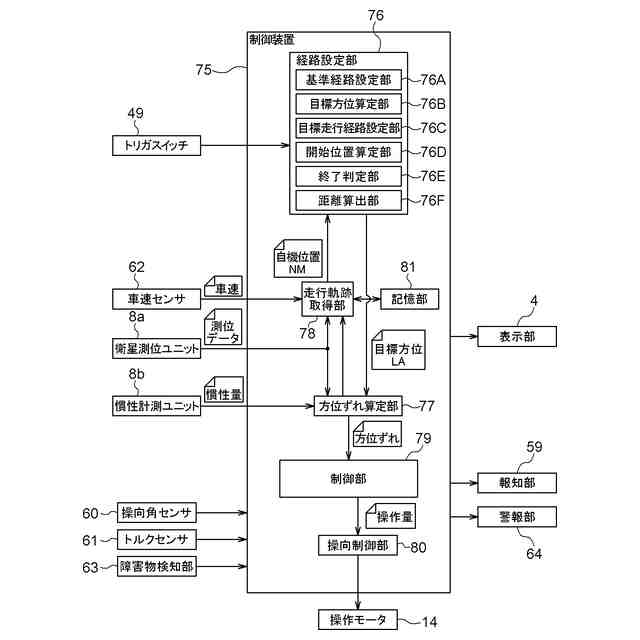
本発明によるトラクタは、走行装置が備えられた機体と、航法衛星の測位信号に基づいて前記機体の位置情報の検出可能な位置検出部と、前記位置情報の経時的な検出に基づいて前記機体の走行軌跡を取得可能な走行軌跡取得部と、前記走行軌跡に基づいて目標方位を算定する目標方位算定部と、前記目標方位に基づいて目標走行経路を生成する目標生成経路設定部と、前記目標走行経路に沿って前記走行装置の操向を可能な操向制御部と、前記機体が移動中に複数の前記目標走行経路を表示する表示部と、を備え、前記表示部は、前記複数の前記目標走行経路のうち、前記機体が前記目標走行経路に沿うように移動した後の前記目標走行経路に対しては、当該目標走行経路の周囲に移動済みを示す色を着色して表示し、その他の目標走行経路の周囲に対しては、前記着色とは異なる色で表示し、且つ、前記複数の前記目標走行経路を表示する部分の横に円形上の表示を行うことによって前記目標走行経路に対する前記機体の方位のずれを示す。
また、本発明による走行作業機は、航法衛星の測位信号に基づいて機体の位置情報の検出可能な位置検出部と、前記位置情報の経時的な検出に基づいて前記機体の走行軌跡を取得可能な走行軌跡取得部と、前記走行軌跡に基づいて目標方位を算定する目標方位算定部と、前記目標方位に沿って前記機体の操向制御を可能な操向制御部と、前記目標方位を算定する際に取得する前記走行軌跡の始点及び終点の両方を設定可能な一つの操作具と、が備えられていることを特徴とする。
【0007】
本発明によれば、始点と終点との夫々が一つの操作具で設定可能である。このため、始点と終点との登録の際に、各別の操作具が設けられる構成と比較して、搭乗者が操作具を押し間違える虞が軽減され、始点及び終点の登録操作が簡易になる。また、この一つの操作具が複数の操作手段として兼用されることによって、操作具の数が削減され、コスト面で有利になる。これにより、目標方位を算定する際の始点及び終点の設定を簡易な操作で可能な走行作業機が実現される。
【0008】
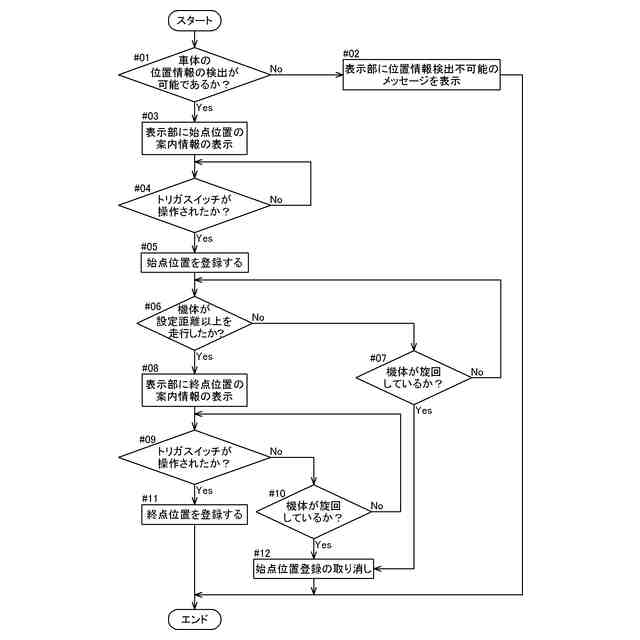
本発明において、前記目標方位算定部は、前記操作具の操作によって前記始点が設定され、かつ、前記始点の設定後に前記機体が予め設定された距離を走行した後に、前記操作具の操作による前記終点の設定が可能となるように構成されていると好適である。
【0009】
本構成であれば、始点の設定後に機体が必ず走行して、始点と異なる位置に終点の設定が可能となる。また、本構成であれば、始点と終点との距離が予め設定された距離以上に離れることによって、所定の精度以上で目標方位の算定が可能となる。
【0010】
本発明において、前記目標方位の設定に関する情報を表示可能な表示部が備えられ、前記操作具の操作による前記終点の設定が可能となった場合、前記表示部は、前記終点の設定が可能となったことを表示すると好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
4日前
株式会社クボタ
収穫機
5日前
株式会社クボタ
収穫機
5日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業車両
25日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
電動車両
4日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
水処理設備
20日前
株式会社クボタケミックス
電気融着継手
20日前
株式会社クボタ
有機物堆肥化装置
19日前
株式会社クボタ
担体流動槽及び浄化槽
12日前
株式会社クボタ
自律農業車両の旋回制御
11日前
株式会社クボタ
自律農業車両の旋回制御
11日前
株式会社クボタ
フロントローダの操作機構及び作業車両
8日前
株式会社クボタ
インジェクタクリップおよびインジェクタ取付構造
18日前
株式会社クボタ
ガス収集システム、ガス収集装置、及びガス収集方法
8日前
株式会社クボタ
作業車
19日前
株式会社クボタ
トラクタ
11日前
株式会社クボタ
トラクタ
11日前
株式会社クボタ
センサ取付冶具
4日前
株式会社クボタケミックス
電動アクチュエータ
6日前
株式会社クボタケミックス
電動アクチュエータ
6日前
株式会社クボタ
耐窒化性にすぐれる耐熱合金
6日前
株式会社クボタ
情報処理装置、制御内容決定方法、制御システム、および制御内容決定プログラム
4日前
井関農機株式会社
作業車両
12日前
個人
植裁物への水やり装置
18日前
タキイ種苗株式会社
レタス植物
26日前
みのる産業株式会社
移植機
8日前
みのる産業株式会社
移植機
8日前
松山株式会社
収穫機
11日前
株式会社ロッソ
植物栽培器
22日前
株式会社ロッソ
植物栽培器
22日前
株式会社大貴
動物用トイレ
11日前
個人
ルアー
26日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ