TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024160569
公報種別
公開特許公報(A)
公開日
2024-11-14
出願番号
2023075709
出願日
2023-05-01
発明の名称
車両方位角推定方法、プログラム、車両方位角推定装置、及び自律移動体
出願人
国立大学法人金沢大学
代理人
個人
主分類
G01C
21/28 20060101AFI20241107BHJP(測定;試験)
要約
【課題】精度良く車両の方位角を推定できる車両方位角推定方法などを提供する。
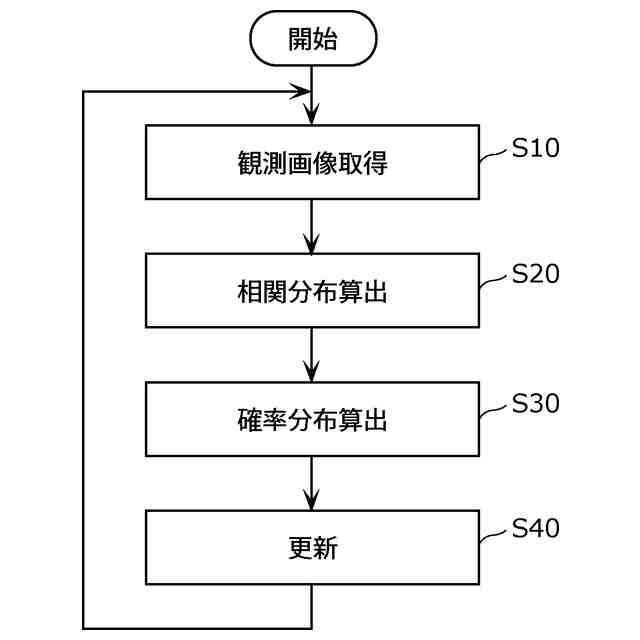
【解決手段】車両方位角推定方法は、自車両の前後方向の方位角を推定する方法であって、自車両が走行する道路の画像である観測画像をハフ変換することによって得られる第一ハフスペクトラムと、観測画像に対応する地図画像をハフ変換することによって得られる第二ハフスペクトラムとの相関分布を算出する相関分布算出ステップS20と、相関分布に基づいて、観測画像の地図画像に対する方位角誤差の確率分布である観測確率分布を算出する確率分布算出ステップS30とを含む。
【選択図】図12
特許請求の範囲
【請求項1】
自車両の前後方向の方位角を推定する車両方位角推定方法であって、
前記自車両が走行する道路の画像である観測画像をハフ変換することによって得られる第一ハフスペクトラムと、前記観測画像に対応する地図画像をハフ変換することによって得られる第二ハフスペクトラムとの相関分布を算出する相関分布算出ステップと、
前記相関分布に基づいて、前記観測画像の前記地図画像に対する方位角誤差の確率分布である観測確率分布を算出する確率分布算出ステップとを含む
車両方位角推定方法。
続きを表示(約 870 文字)
【請求項2】
過去に算出された前記観測確率分布に基づいて算出された前記方位角誤差の確率分布である事前確率分布を、最新の前記観測確率分布に基づいて、事後確率分布に更新する更新ステップをさらに含む
請求項1に記載の車両方位角推定方法。
【請求項3】
前記更新ステップにおいて、BBF(Binary Bayes Filter)を用いる
請求項2に記載の車両方位角推定方法。
【請求項4】
前記更新ステップにおいて、前記観測確率分布の分散が大きくなるにしたがって、前記観測確率分布の確率が0.5に近づくように、前記観測確率分布を変換する
請求項2又は3に記載の車両方位角推定方法。
【請求項5】
前記相関分布算出ステップにおいて、分割した前記観測画像をハフ変換する
請求項1~3のいずれか1項に記載の車両方位角推定方法。
【請求項6】
前記相関分布算出ステップにおいて、前記自車両が走行する道路の曲率半径に基づいて決定された寸法に前記観測画像を分割する
請求項5に記載の車両方位角推定方法。
【請求項7】
請求項1~3のいずれか1項に記載の車両方位角推定方法をコンピュータに実行させるための
プログラム。
【請求項8】
自車両の前後方向の方位角を推定する車両方位角推定装置であって、
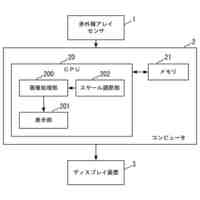
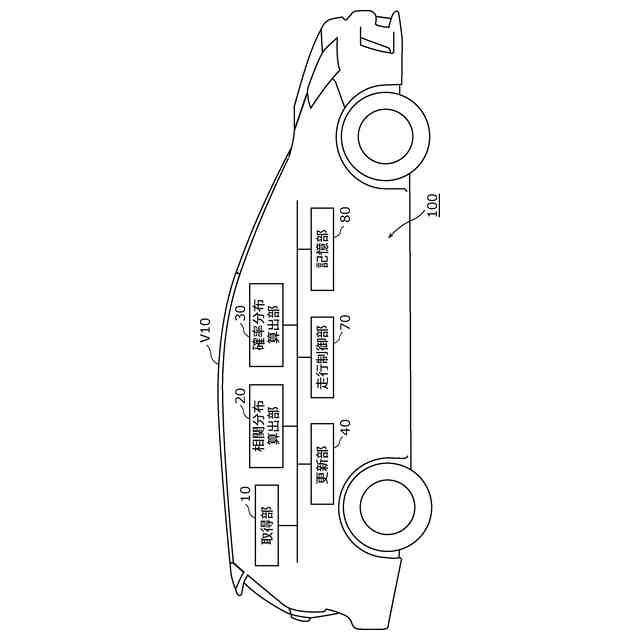
前記自車両において取得した観測画像をハフ変換することによって得られる第一ハフスペクトラムと、地図画像をハフ変換することによって得られる第二ハフスペクトラムとの相関分布を算出する相関分布算出部と、
前記相関分布に基づいて、前記観測画像の前記地図画像に対する方位角誤差の確率分布である観測確率分布を算出する確率分布算出部とを備える
車両方位角推定装置。
【請求項9】
請求項8に記載の車両方位角推定装置と、
前記観測画像を取得する取得部とを備える
自律移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両方位角推定方法、プログラム、車両方位角推定装置、及び自律移動体に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
現在、自動車等の移動体の自動運転に関する研究が活発に進められている(特許文献1等参照)。移動体の自動運転において、移動体の前後方向の方位角を推定する必要がある。例えば、特許文献1には、自車両の周辺の構造物を含む周辺環境に基づく周辺画像と、自車両の周辺の地図とに基づいて、自車両の位置情報、及び方位角情報を補正する発明が記載されている。特許文献1に記載された発明においては、周辺画像と地図とを重畳して表示し、当該表示に対する自車両のユーザの補正指示に基づいて、自車両の位置情報及び方位角情報を補正しようとしている。
【先行技術文献】
【特許文献】
【0003】
特許第6669059号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載された発明においては、補正精度がユーザの指示内容に依存するため、十分な補正精度を得られるとは限らない。
【0005】
そこで、本発明は、精度良く車両の方位角を推定できる車両方位角推定方法などを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一態様に係る車両方位角推定方法は、自車両の前後方向の方位角を推定する方法であって、前記自車両が走行する道路の画像である観測画像をハフ変換することによって得られる第一ハフスペクトラムと、前記観測画像に対応する地図画像をハフ変換することによって得られる第二ハフスペクトラムとの相関分布を算出する相関分布算出ステップと、前記相関分布に基づいて、前記観測画像の前記地図画像に対する方位角誤差の確率分布である観測確率分布を算出する確率分布算出ステップとを含む。
【0007】
また、上記目的を達成するために、本発明の一態様に係るプログラムは、上記車両方位角推定方法をコンピュータに実行させるためのプログラムである。
【0008】
また、上記目的を達成するために、本発明の一態様に係る車両方位角推定装置は、自車両の前後方向の方位角を推定する装置であって、前記自車両において取得した観測画像をハフ変換することによって得られる第一ハフスペクトラムと、地図画像をハフ変換することによって得られる第二ハフスペクトラムとの相関分布を算出する相関分布算出部と、前記相関分布に基づいて、前記観測画像の前記地図画像に対する方位角誤差の確率分布である観測確率分布を算出する確率分布算出部とを備える。
【0009】
また、上記目的を達成するために、本発明の一態様に係る自律移動体は、上記車両方位角推定装置と、前記観測画像を取得する取得部とを備える。
【0010】
なお、これらの包括的又は具体的な態様は、システム、方法、集積回路、コンピュータプログラム又は非一時的なコンピュータで読み取り可能なCD-ROM等の記録媒体で実現されてもよく、システム、方法、集積回路、コンピュータプログラム及び記録媒体の任意な組み合わせで実現されてもよい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人金沢大学
太陽電池とその製造方法
22日前
国立大学法人金沢大学
形状推定方法、プログラム、形状推定装置、及び自律移動体
23日前
個人
通電検査装置
2日前
個人
光フアィバー距離計測器
4日前
個人
光フアィバー距離計測器
4日前
個人
バッテリ用交流電流供給装置
4日前
株式会社オービット
検査装置
11日前
株式会社ハシマ
検針機
1日前
有限会社フィット
外観検査装置
15日前
株式会社東芝
センサ
11日前
富士電機株式会社
回転機
12日前
株式会社SUBARU
車載装置
18日前
株式会社東芝
試験装置
18日前
アズビル株式会社
真空計測システム
12日前
アズビル株式会社
真空計測システム
12日前
DIC株式会社
測定装置
3日前
シスメックス株式会社
分析装置
8日前
富士電機株式会社
放射線検出器
3日前
個人
ネブライザー
10日前
株式会社タムラ製作所
電流検出器
8日前
株式会社アドバンテスト
試験装置
10日前
スタンレー電気株式会社
車両前方視認装置
1日前
ダイハツ工業株式会社
凹部の深さ測定方法
1日前
スタンレー電気株式会社
車両前方視認装置
1日前
日鉄テックスエンジ株式会社
情報処理装置
8日前
株式会社国際電気
調整装置
15日前
本田技研工業株式会社
物体検出装置
1日前
矢崎総業株式会社
電流センサ
2日前
株式会社デンソー
電流検出器
15日前
本田技研工業株式会社
物体検出装置
1日前
株式会社日本マイクロニクス
プローブ
8日前
愛知製鋼株式会社
測量方法及び測量システム
8日前
株式会社エイアンドティー
生体試料分析装置
8日前
株式会社レイズテック
部品寸法データ集計装置
17日前
アズビル株式会社
温度測定システムおよび方法
8日前
株式会社KRI
麹造り工程の計測装置および計測方法
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ