TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024160313
公報種別
公開特許公報(A)
公開日
2024-11-13
出願番号
2024131721,2019235644
出願日
2024-08-08,2019-12-26
発明の名称
自律走行作業装置
出願人
アマノ株式会社
代理人
個人
,
個人
主分類
G05D
1/648 20240101AFI20241106BHJP(制御;調整)
要約
【課題】床面の様々な段差に対して、操作者の利便性を向上しつつ、適切に走行または作業を継続させる。
【解決手段】
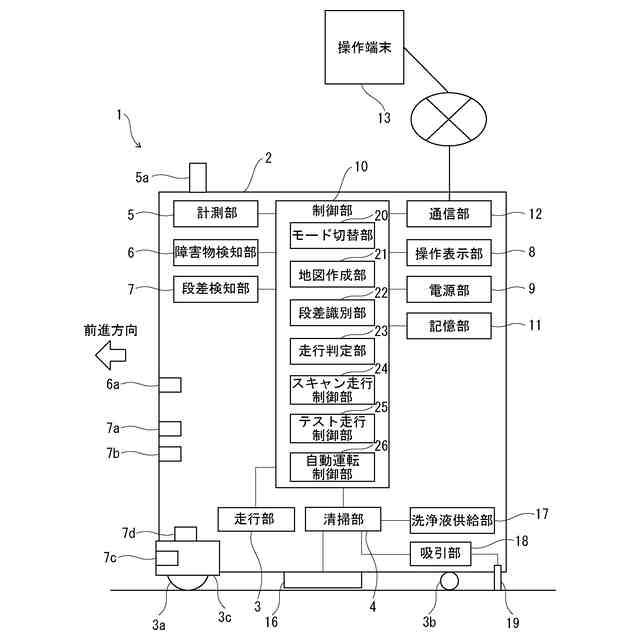
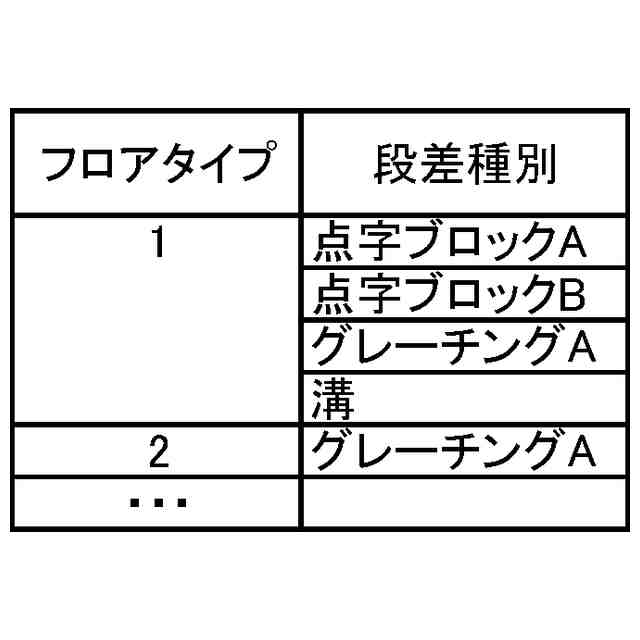
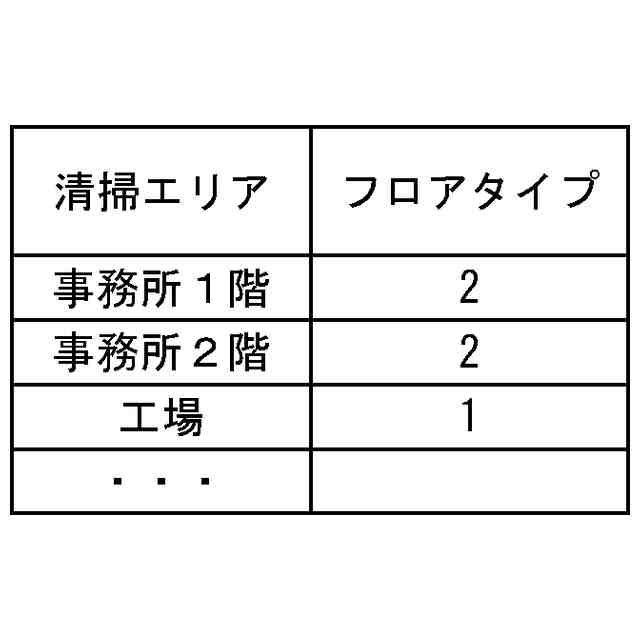
自律走行作業装置1は、装置本体2と、走行部3と、清掃部4と、制御部10と、清掃エリアの床面に存在する段差を識別する1以上の段差種別を組み合わせてフロアタイプとして、1以上のフロアタイプを予め記憶すると共に、各フロアタイプの各段差種別について段差に対する走行または清掃に関する1以上のパラメータを記憶する記憶部11と、
床面に照射された所定の光を含んで撮像した画像の所定の光の形状に基づいて段差を検知する段差検知部7と、段差検知部7の検知結果に基づいて、段差種別を識別する段差識別部22と、
を備える。制御部10は、自動によって設定されるフロアタイプに応じて段差に対して走行または清掃を行うように走行部3または清掃部4を制御する。
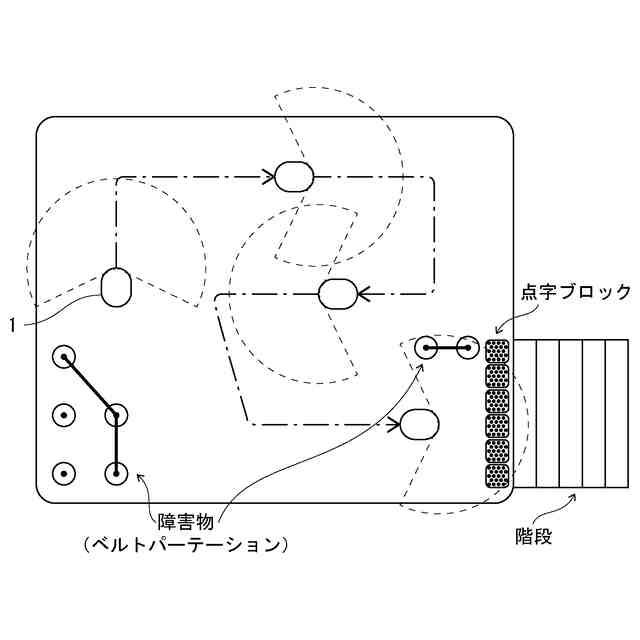
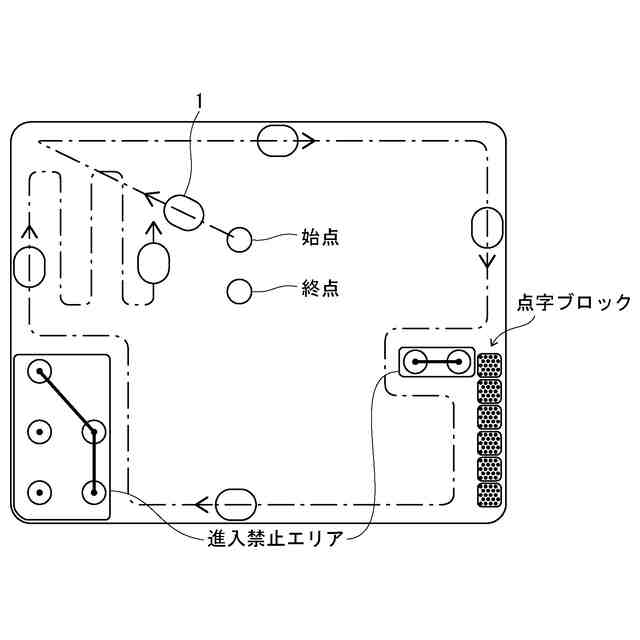
【選択図】図1
特許請求の範囲
【請求項1】
自動的に走行および作業を行う自動運転を実行可能な自律走行作業装置であって、
装置本体と、
前記装置本体を走行させる走行部と、
前記装置本体の走行経路上で作業を行う作業部と、
手動または自動によって前記装置本体が作業エリアの走行または作業を行うように前記走行部または前記作業部を制御する制御部と、
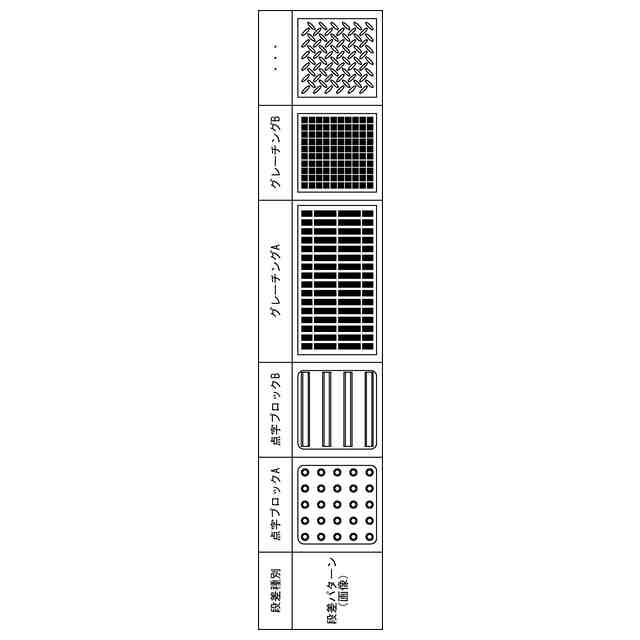
前記作業エリアの床面に存在する段差を識別する1以上の段差種別を組み合わせてフロアタイプとして、1以上の前記フロアタイプを予め記憶すると共に、前記各フロアタイプの前記各段差種別について前記段差に対する走行または作業に関する1以上のパラメータを記憶する記憶部と、を備え、
更に、前記床面に照射された所定の光を含む画像を撮影し、前記画像の前記所定の光の形状に基づいて段差を検知する段差検知部と、
前記段差検知部の検知結果に基づいて、前記段差種別を識別する段差識別部と、を備え、
前記制御部は、自動によって設定される前記フロアタイプに応じて前記1以上のパラメータに基づいて前記段差に対して走行を行うように前記走行部を制御することを特徴とする自律走行作業装置。
続きを表示(約 1,800 文字)
【請求項2】
前記段差検知部は、前記所定の光として進行方向に直交する所定線長のレーザーラインを照射するラインマーカーを備えることを特徴とする請求項1に記載の自律走行作業装置。
【請求項3】
前記制御部は、前記作業エリアを走行している間の走行状況または周辺状況を取得し、前記走行状況または前記周辺状況に基づいて前記フロアタイプを判定して自動で設定することを特徴とする請求項1に記載の自律走行作業装置。
【請求項4】
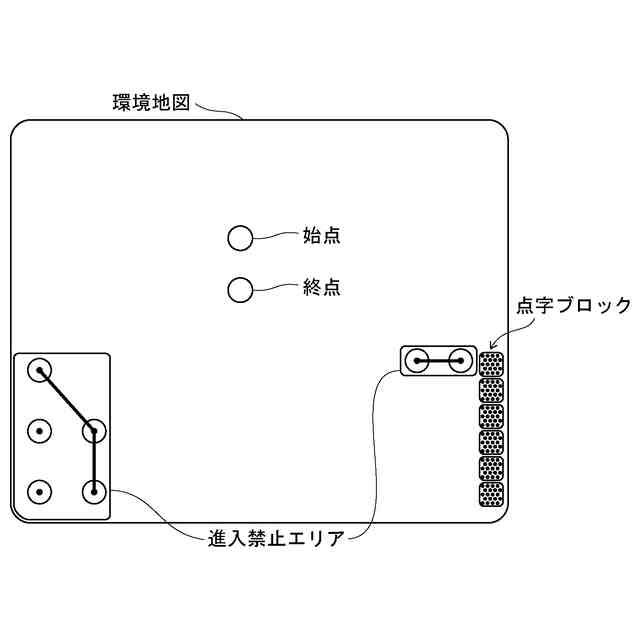
前記制御部は、前記作業エリアの環境地図に基づいて前記作業エリアを塗りつぶすような前記走行経路で前記装置本体を自動的に始点から終点まで走行させるテスト走行を実行するように前記走行部または前記作業部を制御して、前記テスト走行時の走行データまたは作業データを含む運転プランを作成するテスト走行制御部と、
前記運転プランの前記走行データまたは前記作業データに従って前記自動運転を実行するように前記走行部または前記作業部を制御する自動運転制御部と、を含み、
前記テスト走行制御部は、前記テスト走行時に前記フロアタイプを判定して自動で設定して前記運転プランに関連付けることを特徴とする請求項
3
に記載の自律走行作業装置。
【請求項5】
前記パラメータは、前記段差に対する走行規則を含むことを特徴とする請求項1ないし請求項
4
の何れか1項に記載の自律走行作業装置。
【請求項6】
前記制御部は、前記作業エリアを走行している間に前記段差検知部によって前記段差を検知した場合、前記段差の前記段差種別に設定されている前記パラメータの前記走行規則を取得し、前記走行規則に従って前記走行部または前記作業部を制御しつつ前記段差を走行するときの走行状況を取得し、前記走行規則に従った走行が成功したか否かを前記走行状況に基づいて判定し、前記走行規則に従った走行が成功しなかった場合には、前記走行状況に基づいて前記パラメータを再設定することを特徴とする請求項
5
に記載の自律走行作業装置。
【請求項7】
前記制御部は、前記作業エリアを走行している間に前記段差検知部によって前記段差を検知した場合、前記段差の前記段差種別に設定されている前記パラメータの前記走行規則を取得し、前記走行規則に従って前記走行部または前記作業部を制御しつつ前記段差を走行するときの走行状況を取得し、前記走行規則に従った走行が成功したか否かを前記走行状況に基づいて判定し、前記走行規則に従った走行が成功しなかった場合には、前記走行規則に従った走行の失敗を示すと共に前記パラメータの再設定を促す情報を操作者に通知することを特徴とする請求項
5
に記載の自律走行作業装置。
【請求項8】
前記作業部は、前記床面に対する作業として清掃を行う清掃部で構成され、
前記パラメータは、前記清掃部が前記段差または前記床面に対して清掃を行う場合の清掃条件を含むことを特徴とする請求項1ないし請求項
7
の何れか1項に記載の自律走行作業装置。
【請求項9】
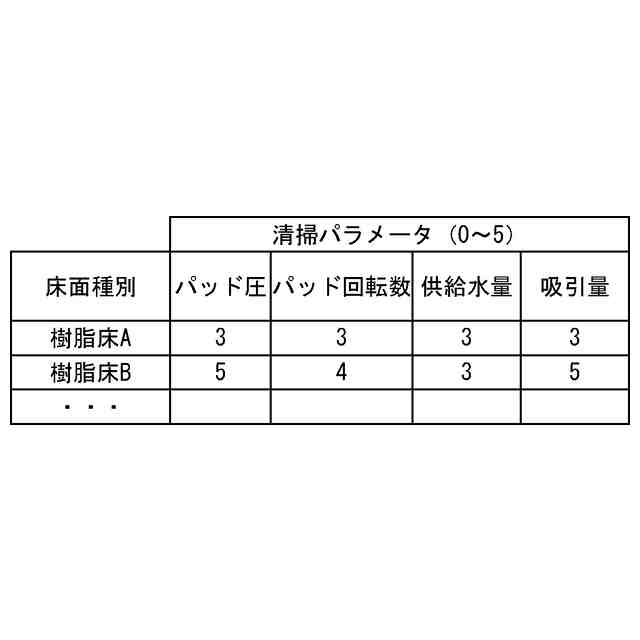
前記記憶部は、前記床面の材質を識別する1以上の床面種別を記憶すると共に、1つ以上の前記床面種別毎に設定される前記清掃条件を記憶し、
前記段差識別部は、前記段差検知部の検知結果に基づいて、走行中の床面の床面種別を識別し、
前記段差を境界線として前記床面の材質が変化する場合、前記清掃部は、前記床面の材質に応じた前記清掃条件に変更して清掃を行うことを特徴とする請求項
8
に記載の自律走行作業装置。
【請求項10】
前記段差検知部は、
前記装置本体の周囲の非作業対象を検知する光学式センサと、
前記画像を撮像するカメラと、
床面からの振動を検知する振動センサと、を更に備え、
前記制御部は、
前記カメラの撮像結果と、
前記光学式センサの検知結果および
/または
前記振動センサの検知結果
と
の組み合わせに基づいて、前記段差を識別することを特徴とする請求項1ないし請求項
9
の何れか1項に記載の自律走行作業装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動的に走行および作業を行う自動運転を実行可能な自律走行作業装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
自律走行作業装置は、所定の作業エリア(清掃エリア)で自動的に走行および作業(清掃)を行う自動運転を実行可能に構成される。例えば、自律走行作業装置は、電動モータによって回転駆動される回転ブラシと、床面に洗浄液を散布する給水機構と、床面上の洗浄汚水を吸引する吸引機構とを搭載して、洗浄液が散布された床面上で回転ブラシを回転することで床面の汚れを擦り落とすと共に洗浄汚水を吸引し、これにより清掃エリアの床面を清掃する。また、自律走行作業装置は、電動モータによって駆動される駆動輪を搭載して、駆動輪を駆動することで清掃エリアを走行する。このようにして、自律走行作業装置は、自動的に清掃エリアの床面を清掃しながら清掃エリアを走行する。
【0003】
例えば、特許文献1は、パスとランドマークの系列からなる経路情報に基づいて出発点から目的地点まで移動する走行ロボットであって、経路上にある障害物や道路工事中の箇所に遭遇したときに、経路情報に基づく走行を中断し、走行をやり直してから元の経路に戻る走行ロボットについて開示している。
【先行技術文献】
【特許文献】
【0004】
特開2012-187698号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来、自動運転を行う自律走行作業装置が床面を走行しながら清掃や洗浄作業を行う装置の場合は、床面に凹凸や溝などの段差があるときに、回転ブラシや吸引部材と床面との接触不良により、清掃斑や洗浄汚水の吸引漏れが生じることがある。また、自律走行作業装置は、段差の上を走行することで振動が発生し、その振動に起因して故障が発生することがあり、更に、床面に高い突出部分や深い溝などの高低差の大きい段差がある場合には、車輪の脱輪や駆動輪の空転が生じて横転や走行不能になるおそれがある。なお、床面には、点字ブロック、排水溝、グレーチング、床部材の境界など様々な段差が考えられるので、これらに対応して自動運転を行うことは困難である。そのため、自律走行作業装置では、自動運転において、床面に段差がある場合に、清掃斑や洗浄汚水の吸引漏れを回避する手段、並びに段差に対応して走行や清掃をする手段の提供が望まれている。なお、上記した特許文献1の走行ロボットは、経路上に段差や凹凸があった場合、走行を中断してしまうので、段差や凹凸並びにその周囲が清掃箇所から漏れてしまう。
【0006】
本発明は、上記したような問題に鑑みなされたものであり、本発明の課題は、床面の様々な段差に対して、操作者の利便性を向上しつつ、適切に走行または作業を継続させることができる自律走行作業装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の第1の自律走行作業装置は、自動的に走行および作業を行う自動運転を実行可能な自律走行作業装置であって、装置本体と、前記装置本体を走行させる走行部と、前記装置本体の走行経路上で作業を行う作業部と、手動または自動によって前記装置本体が作業エリアの走行または作業を行うように前記走行部または前記作業部を制御する制御部と、前記作業エリアの床面に存在する段差を識別する1以上の段差種別を組み合わせてフロアタイプとして、1以上の前記フロアタイプを予め記憶すると共に、前記各フロアタイプの前記各段差種別について前記段差に対する走行または作業に関する1以上のパラメータを記憶する記憶部と、を備え、
更に、前記床面に照射された所定の光を含む画像を撮影し、前記画像の前記所定の光の形状に基づいて段差を検知する段差検知部と、前記段差検知部の検知結果に基づいて、前記段差種別を識別する段差識別部と、を備え、
前記制御部は、自動によって設定される前記フロアタイプに応じて前記段差に対して走行または作業を行うように前記走行部または前記作業部を制御することを特徴とする。
【0008】
本発明の第1の自律走行作業装置によれば、走行や作業に関するパラメータを、様々な段差に対して個別に設定でき、更に、様々なフロアタイプに対しても個別に設定できるので、フロアタイプを設定するだけで、様々な作業フロアの様々な段差に対応して、適切に走行や作業を行うことができる。
特に、床面の画像に含まれる所定の光の形状に基づいて、段差を識別することができる。
このように、床面の様々な段差に対して、操作者の利便性を向上しつつ、適切に走行または作業を継続させることができる。
【0009】
上記課題を解決するために、本発明の第2の自律走行作業装置において、前記段差検知部は、前記所定の光として進行方向に直交する所定線長のレーザーラインを照射するラインマーカーを備える。
【0010】
本発明の第2の自律走行作業装置によれば、床面の画像に含まれるレーザーラインの形状に基づいて、段差を識別することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アマノ株式会社
自律走行作業装置
11日前
個人
方向検出器
3日前
積水樹脂株式会社
磁性シート
1か月前
ugo株式会社
移動体
3日前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
無人走行体
1か月前
株式会社豊田自動織機
自動走行体
2か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
トヨタ自動車株式会社
自律移動体
2日前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
搬送ロボット
16日前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
搬送システム
26日前
オムロン株式会社
自律作業システム
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
トヨタ自動車株式会社
自律移動システム
2日前
トヨタ自動車株式会社
ロボットシステム
26日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
位置推定システム
2日前
株式会社栗本鐵工所
操作装置
17日前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社FUJI
工作機械の操作システム
9日前
東芝ライテック株式会社
管理システム
1か月前
株式会社デンソー
電子制御装置
2か月前
株式会社ダイフク
物品搬送設備
26日前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社ダイフク
物品搬送設備
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
16日前
株式会社栗本鐵工所
触覚提示装置
1か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
株式会社デンソー
移動体制御装置
2か月前
アズビル株式会社
診断システムおよび診断方法
1か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
24日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ