TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024158918
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023074549
出願日
2023-04-28
発明の名称
レーダ物標追尾装置及びレーダ物標追尾プログラム
出願人
日本無線株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01S
13/66 20060101AFI20241031BHJP(測定;試験)
要約
【課題】本開示は、クラッタの強度が高いときでも、スキャン間相関を用いて、SC比を向上させたうえで、物標を追尾することを目的とする。
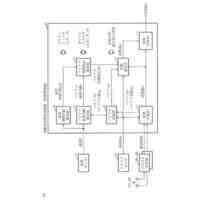
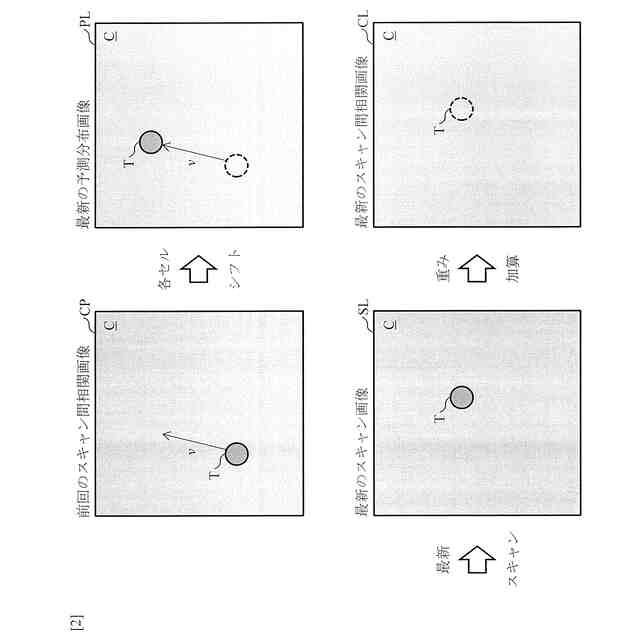
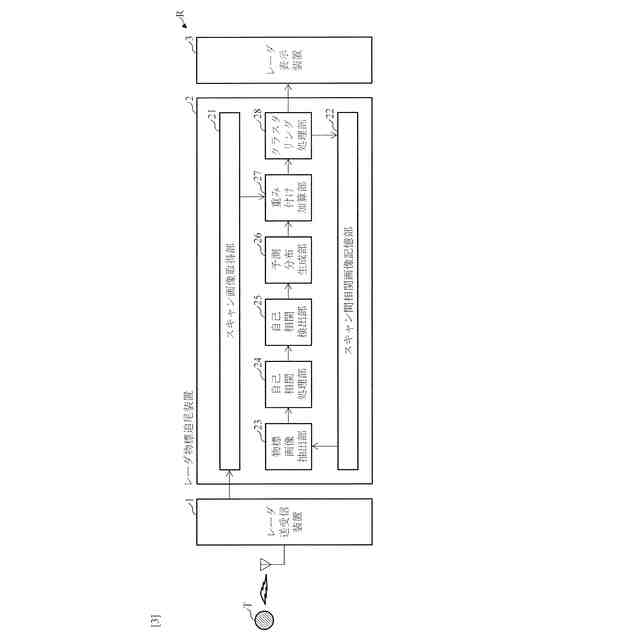
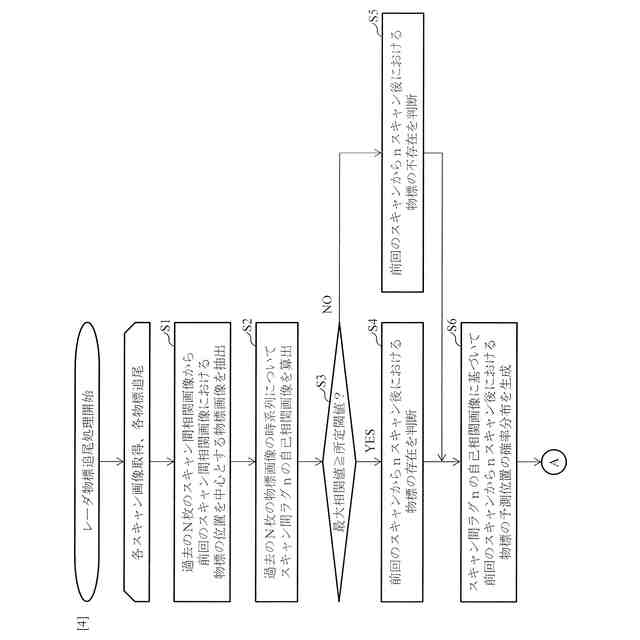
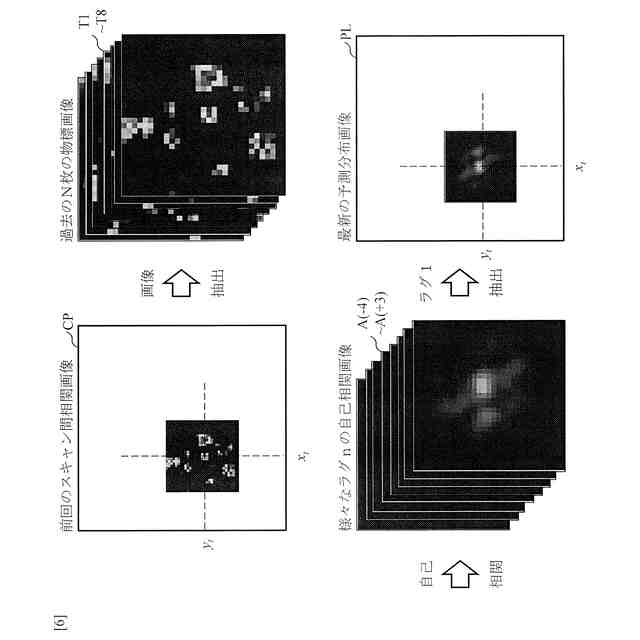
【解決手段】本開示は、レーダを用いて物標Tを追尾するレーダ物標追尾装置2であって、過去のN枚のスキャン間相関画像から、前回のスキャン間相関画像における物標Tの位置を中心とし所定サイズを有する物標画像を抽出する物標画像抽出部23と、過去のN枚の物標画像の時系列について、時間周波数・空間周波数領域における振幅スペクトルの二乗に基づいて、又は、時間・空間領域における物標画像同士の畳み込み積分に基づいて、スキャン間ラグnの自己相関画像を算出する自己相関処理部24と、スキャン間ラグnの自己相関画像に基づいて、前回のスキャンからnスキャン後における物標Tの予測位置の確率分布を生成する予測分布生成部26と、を備えるレーダ物標追尾装置2である。
【選択図】図3
特許請求の範囲
【請求項1】
レーダを用いて物標を追尾するレーダ物標追尾装置であって、
過去のN枚のスキャン間相関画像から、前回のスキャン間相関画像における前記物標の位置を中心とし所定サイズを有する物標画像を抽出する物標画像抽出部と、
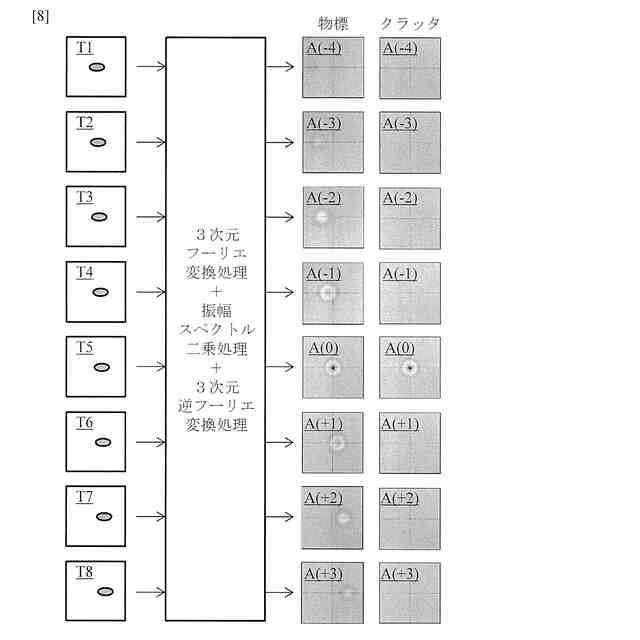
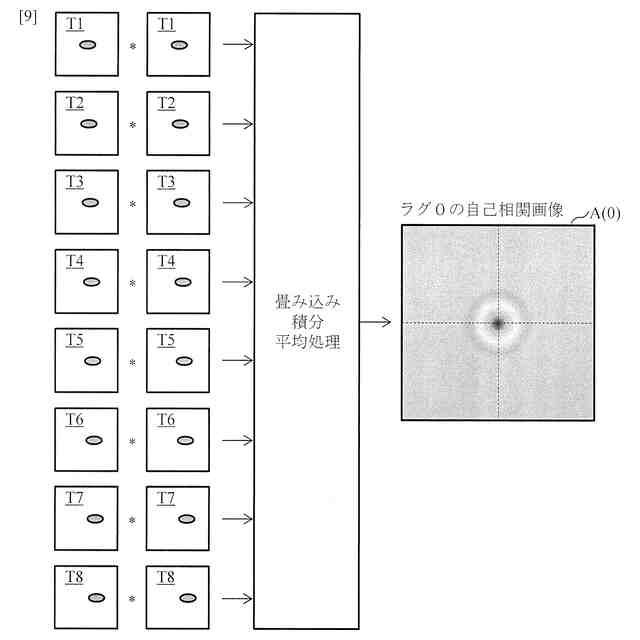
過去のN枚の物標画像の時系列について、時間周波数・空間周波数領域における振幅スペクトルの二乗に基づいて、又は、時間・空間領域における物標画像同士の畳み込み積分に基づいて、スキャン間ラグnの自己相関画像を算出する自己相関処理部と、
前記スキャン間ラグnの自己相関画像に基づいて、前回のスキャンからnスキャン後における前記物標の予測位置の確率分布を生成する予測分布生成部と、
を備えることを特徴とするレーダ物標追尾装置。
続きを表示(約 740 文字)
【請求項2】
前記自己相関処理部は、スキャン間ラグ1の自己相関画像を算出し、
前記予測分布生成部は、前記スキャン間ラグ1の自己相関画像に基づいて、前記前回のスキャンの次の最新のスキャンにおける前記物標の予測位置の確率分布を生成する
ことを特徴とする、請求項1に記載のレーダ物標追尾装置。
【請求項3】
前記スキャン間ラグnの自己相関画像における最大相関値が、前記物標以外のクラッタの強度が低い(高い)ほど高く(低く)設定される所定閾値以上であるときに、前記前回のスキャンからnスキャン後における前記物標の存在を判断し、前記スキャン間ラグnの自己相関画像を前記予測分布生成部へと入力する自己相関検出部、
をさらに備えることを特徴とする、請求項1又は2に記載のレーダ物標追尾装置。
【請求項4】
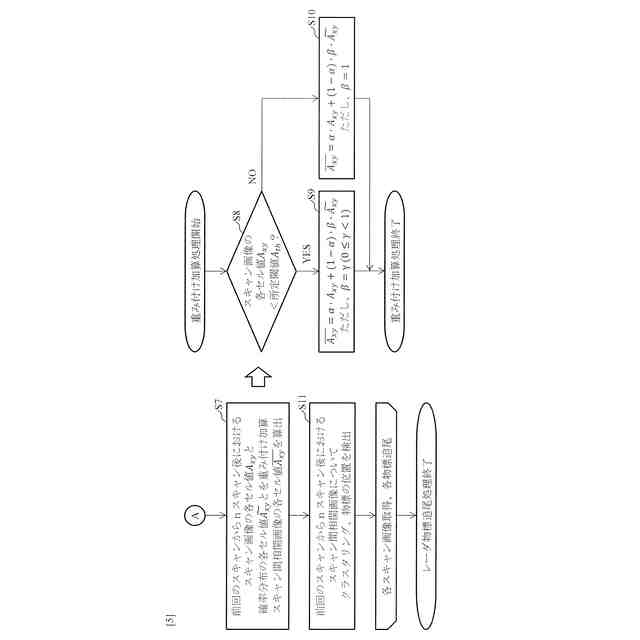
前記前回のスキャンからnスキャン後におけるスキャン画像の各セル値と、前記前回のスキャンからnスキャン後における前記物標の予測位置の確率分布の各セル値と、を重み付け加算したうえで、前記前回のスキャンからnスキャン後におけるスキャン間相関画像の各セル値を算出するにあたり、当該スキャン画像の各セル値が所定閾値未満であるときに、当該スキャン画像の各セル値が前記所定閾値以上であるときと比べて、当該確率分布の各セル値の重み付け係数を0又はより小さい値に設定する重み付け加算部、
をさらに備えることを特徴とする、請求項1又は2に記載のレーダ物標追尾装置。
【請求項5】
請求項1又は2に記載のレーダ物標追尾装置が備える各処理部が実行する各処理ステップを、コンピュータに実行させるためのレーダ物標追尾プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、レーダを用いて物標を追尾する技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
レーダを用いて物標を追尾する技術が、特許文献1等に開示されている。特許文献1では、スキャン間相関を用いて、SC比を向上させたうえで、物標を追尾している。
【0003】
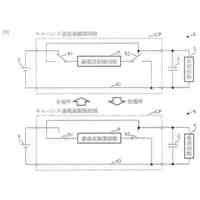
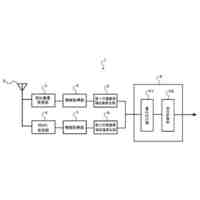
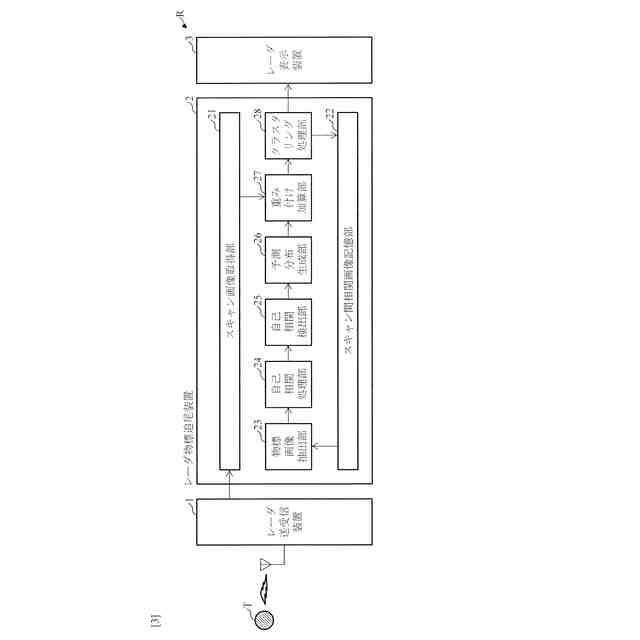
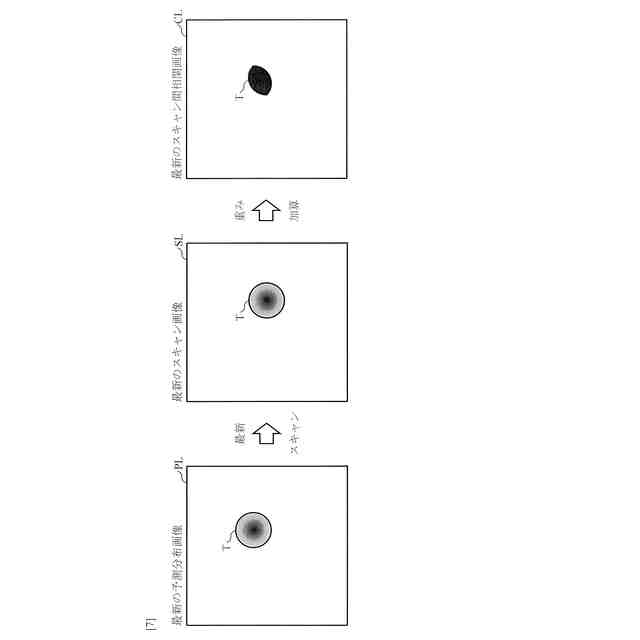
従来技術のレーダ物標追尾処理の概要を図1に示す。図1では、クラッタ(シークラッタ等)の強度が低いときを想定している。前回のスキャン間相関画像CPにおいて、3次元フーリエ変換により、物標T(船舶等)の速度vを算出する。最新の予測分布画像PLにおいて、前回のスキャン間相関画像CPに対する、物標Tの速度v×スキャンの間隔tだけの各セルのシフトにより、物標Tの予測分布を生成する。最新のスキャン画像SLにおいて、最新の予測分布画像PLと比べて、ほぼ同一の位置に物標Tを検出する。最新のスキャン間相関画像CLにおいて、最新の予測分布画像PLと最新のスキャン画像SLとを重み付け加算する。よって、クラッタの強度が低いときには、物標Tの速度vを高精度に算出することができ、最新の予測分布画像PLと最新のスキャン画像SLとの重み付け加算により、SC比を向上させることができ、物標Tを追尾することができる。
【先行技術文献】
【特許文献】
【0004】
特開2012-103197号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
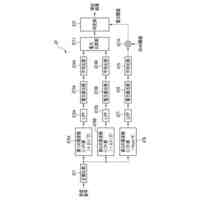
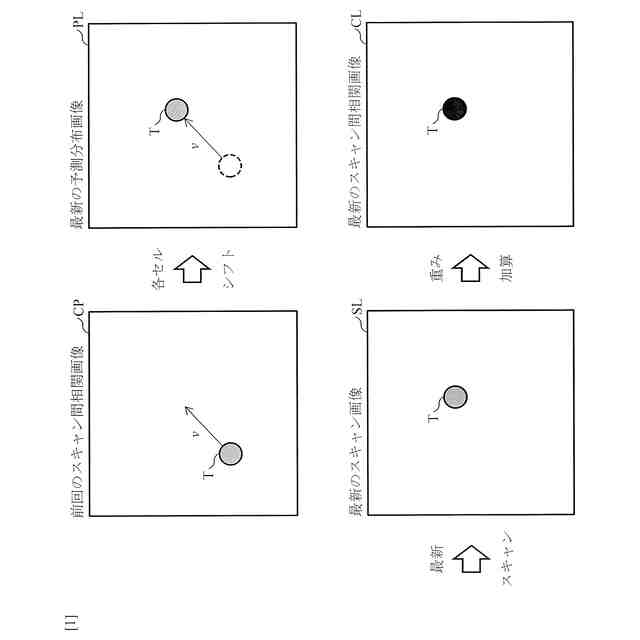
従来技術のレーダ物標追尾処理の課題を図2に示す。図2では、クラッタCの強度が高いときを想定している。前回のスキャン間相関画像CPにおいて、3次元フーリエ変換により、物標Tの速度vを算出する。最新の予測分布画像PLにおいて、前回のスキャン間相関画像CPに対する、物標Tの速度v×スキャンの間隔tだけの各セルのシフトにより、物標Tの予測分布を生成する。最新のスキャン画像SLにおいて、最新の予測分布画像PLと比べて、多少ずれた位置に物標Tを検出する。最新のスキャン間相関画像CLにおいて、最新の予測分布画像PLと最新のスキャン画像SLとを重み付け加算する。しかし、クラッタCの強度が高いときには、物標Tの速度vを高精度に算出することができず、最新の予測分布画像PLと最新のスキャン画像SLとの重み付け加算によっても、SC比を向上させることができず、物標Tを追尾することができない。
【0006】
そこで、前記課題を解決するために、本開示は、クラッタの強度が高いときでも、スキャン間相関を用いて、SC比を向上させたうえで、物標を追尾することを目的とする。
【課題を解決するための手段】
【0007】
前記課題を解決するために、過去の物標画像の時系列について、自己相関画像を算出する。ここで、自己相関画像は、物標の予測位置の確率分布に対応する。そして、物標の予測位置の確率分布は、クラッタの強度が高いときには、高い冗長性を有する。よって、物標の予測位置の確率分布とスキャン画像上との物標とは、クラッタの強度が高いときでも、十分な重なりを有する。そして、物標の予測位置の確率分布とスキャン画像上の物標との重み付け加算により、SC比を向上させることができ、物標を追尾することができる。
【0008】
具体的には、本開示は、レーダを用いて物標を追尾するレーダ物標追尾装置であって、過去のN枚のスキャン間相関画像から、前回のスキャン間相関画像における前記物標の位置を中心とし所定サイズを有する物標画像を抽出する物標画像抽出部と、過去のN枚の物標画像の時系列について、時間周波数・空間周波数領域における振幅スペクトルの二乗に基づいて、又は、時間・空間領域における物標画像同士の畳み込み積分に基づいて、スキャン間ラグnの自己相関画像を算出する自己相関処理部と、前記スキャン間ラグnの自己相関画像に基づいて、前回のスキャンからnスキャン後における前記物標の予測位置の確率分布を生成する予測分布生成部と、を備えることを特徴とするレーダ物標追尾装置である。
【0009】
この構成によれば、クラッタの強度が高いときでも、自己相関処理に基づくスキャン間相関を用いて、SC比を向上させたうえで、物標を追尾することができる。
【0010】
また、本開示は、前記自己相関処理部は、スキャン間ラグ1の自己相関画像を算出し、前記予測分布生成部は、前記スキャン間ラグ1の自己相関画像に基づいて、前記前回のスキャンの次の最新のスキャンにおける前記物標の予測位置の確率分布を生成することを特徴とするレーダ物標追尾装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本無線株式会社
キャパシタ過電流制限回路
2日前
日本無線株式会社
イベント管理システム、イベント管理方法
17日前
日本無線株式会社
位相同期ループ回路及びフェーズドアレイアンテナ
18日前
日本無線株式会社
移動体姿勢計測装置及び移動体姿勢計測プログラム
29日前
日本無線株式会社
衛星信号受信機及び衛星信号受信機における測位方法
2日前
日本無線株式会社
燃料切替支援システム、燃料切替支援方法、プログラム
11日前
日本無線株式会社
無線受信装置およびバースト検出方法
9日前
個人
粒子分析装置
2日前
個人
アクセサリー型テスター
3日前
日本精機株式会社
位置検出装置
19日前
栄進化学株式会社
浸透探傷用濃縮液
9日前
エイブリック株式会社
電流検出回路
16日前
東レ株式会社
シート状物の検査方法
17日前
株式会社ミツトヨ
画像測定機
4日前
株式会社テイエルブイ
振動検出装置
2日前
ダイハツ工業株式会社
試料セル
2日前
株式会社チノー
放射光測温装置
16日前
東ソー株式会社
自動分析装置及び方法
19日前
トヨタ自動車株式会社
電気自動車
3日前
日本特殊陶業株式会社
ガスセンサ
16日前
大和製衡株式会社
計量装置
9日前
日本特殊陶業株式会社
ガスセンサ
16日前
株式会社 キョーワ
食品搬送装置
16日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
理研計器株式会社
ガス検出器
4日前
株式会社熊谷組
計測システム
9日前
日本碍子株式会社
ガスセンサ
16日前
富士電機株式会社
エンコーダ
17日前
大成建設株式会社
画像表示システム
12日前
株式会社ニコン
検出装置
2日前
株式会社 システムスクエア
検査装置
10日前
株式会社デンソー
試験装置
12日前
株式会社ヨコオ
シートコンタクタ
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ