TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024158042
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023072876
出願日
2023-04-27
発明の名称
バリ取りシステム、バリ取り方法、及びプログラム
出願人
株式会社神戸製鋼所
代理人
個人
,
個人
,
個人
主分類
G05B
19/4093 20060101AFI20241031BHJP(制御;調整)
要約
【課題】バリ取りの自動化の実現を図ることが可能なバリ取りシステムを提供する。
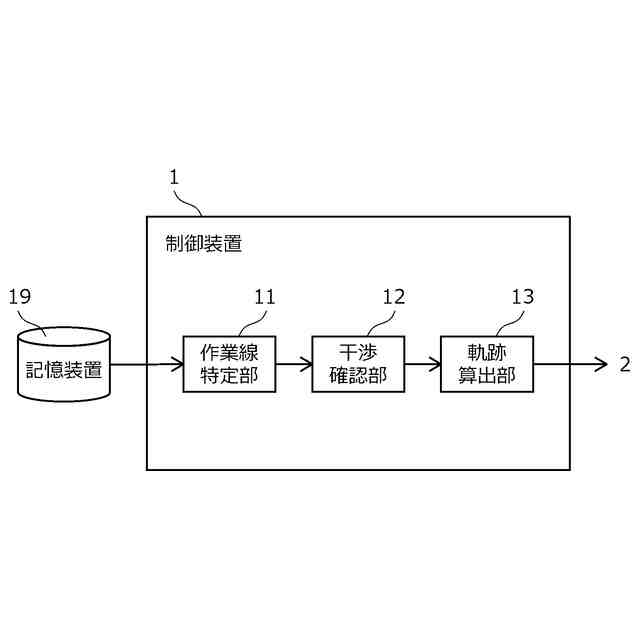
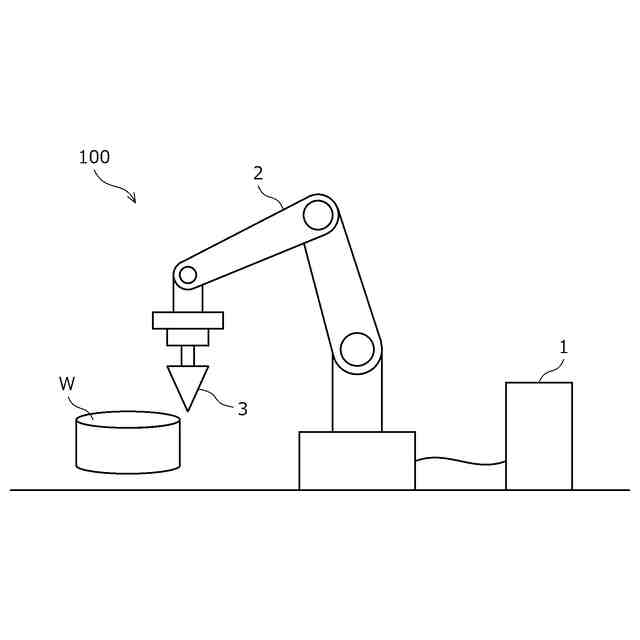
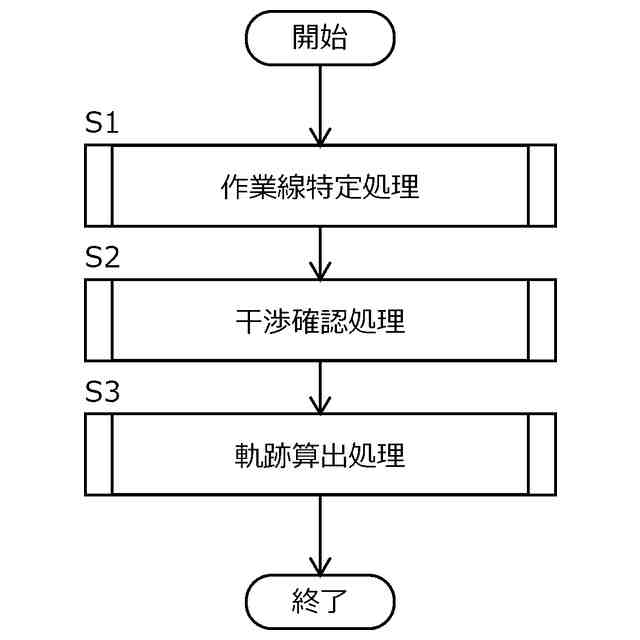
【解決手段】バリ取りシステムは、対象物の形状を表すデータに基づいて、対象物の稜線の中からバリ取りの対象となる作業線を特定する特定部と、作業線への進入、作業線に沿った移動、及び作業線からの退避を含む、バリ取り工具の目標軌跡を算出する算出部と、目標軌跡に基づいてバリ取り工具を移動させる工作機械と、を備える。
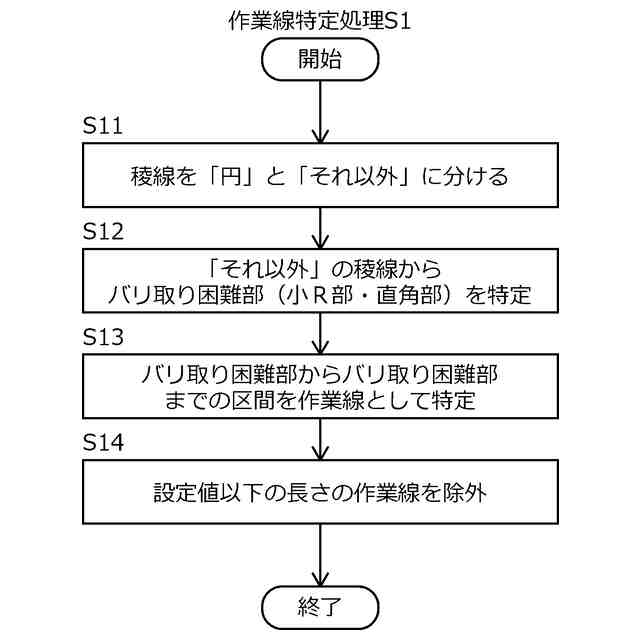
【選択図】図2
特許請求の範囲
【請求項1】
対象物の形状を表すデータに基づいて、前記対象物の稜線の中からバリ取りの対象となる作業線を特定する特定部と、
前記作業線への進入、前記作業線に沿った移動、及び前記作業線からの退避を含む、バリ取り工具の目標軌跡を算出する算出部と、
前記目標軌跡に基づいて前記バリ取り工具を移動させる工作機械と、
を備える、バリ取りシステム。
続きを表示(約 1,000 文字)
【請求項2】
前記目標軌跡は、前記作業線への進入角度及び前記作業線からの退避角度を含む、
請求項1に記載のバリ取りシステム。
【請求項3】
前記特定部は、前記作業線の端点の種類を特定し、
前記算出部は、前記端点の種類に応じて、前記端点における前記作業線への進入又は前記作業線からの退避の種類を選択する、
請求項1に記載のバリ取りシステム。
【請求項4】
前記特定部は、前記作業線の端点において前記作業線に沿った方向に前記バリ取り工具が通り抜け可能であるか否か特定する、
請求項1に記載のバリ取りシステム。
【請求項5】
前記算出部は、前記作業線の端点において前記バリ取り工具が通り抜け可能である場合に、前記端点における前記作業線への進入角度又は前記作業線からの退避角度を前記作業線に対して鈍角に設定する、
請求項4に記載のバリ取りシステム。
【請求項6】
前記算出部は、前記作業線の端点において前記バリ取り工具が通り抜け不能である場合に、前記端点における前記作業線への進入角度又は前記作業線からの退避角度を前記作業線に対して鋭角に設定する、
請求項4に記載のバリ取りシステム。
【請求項7】
前記目標軌跡は、
前記作業線の第1中途点に進入し、前記作業線の第1端点に向かって移動し、前記第1端点から退避する第1軌跡と、
前記作業線の前記第1中途点よりも前記第1端点に近い第2中途点に進入し、前記作業線の第2端点に向かって移動し、前記第2端点から退避する第2軌跡と、
を含む、
請求項1に記載のバリ取りシステム。
【請求項8】
前記特定部は、前記稜線の中から所定形状の角部を特定し、前記角部の間の区間を前記作業線として特定する、
請求項1に記載のバリ取りシステム。
【請求項9】
前記特定部は、前記稜線の中から曲率半径が所定以下である凹部を前記角部として特定する、
請求項8に記載のバリ取りシステム。
【請求項10】
前記特定部は、前記稜線の中から線分の角度変化が所定以上である角を前記角部として特定する、
請求項8に記載のバリ取りシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、バリ取りシステム、バリ取り方法、及びプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、対象物の稜線が視覚センサにより検出されるように相対移動手段を作動させ、視覚センサにより得られる検出稜線を用いてバリ取り動作プログラムを生成し、バリ取り動作プログラムが、バリ取りツールが検出稜線に基づく軌跡に沿って移動するようにロボットを動作させる、バリ取り装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-94638号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記文献には、バリ取りツールが検出稜線に基づく軌跡に沿って移動することが記載されているものの、実際にバリ取り作業を実現するための軌跡生成について十分に開示されていない。
【0005】
本発明は、上記課題に鑑みてなされたものであり、その主な目的は、バリ取りの自動化の実現を図ることが可能なバリ取りシステム、バリ取り方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の一の態様のバリ取りシステムは、対象物の形状を表すデータに基づいて、前記対象物の稜線の中からバリ取りの対象となる作業線を特定する特定部と、前記作業線への進入、前記作業線に沿った移動、及び前記作業線からの退避を含む、バリ取り工具の目標軌跡を算出する算出部と、前記目標軌跡に基づいて前記バリ取り工具を移動させる工作機械と、を備える。これによれば、バリ取りの自動化の実現を図ることが可能となる。
【0007】
上記態様において、前記目標軌跡は、前記作業線への進入角度及び前記作業線からの退避角度を含んでもよい。これによれば、進入角度及び退避角度を含む目標軌跡を算出することが可能となる。
【0008】
上記態様において、前記特定部は、前記作業線の端点の種類を特定し、前記算出部は、前記端点の種類に応じて、前記端点における前記作業線への進入又は前記作業線からの退避の種類を選択してもよい。これによれば、端点の種類に応じた進入又は退避の種類を選択することが可能となる。
【0009】
上記態様において、前記特定部は、前記作業線の端点において前記作業線に沿った方向に前記バリ取り工具が通り抜け可能であるか否か特定してもよい。これによれば、バリ取り工具が通り抜け可能であるか否かを端点の種類として特定することが可能となる。
【0010】
上記態様において、前記算出部は、前記作業線の端点において前記バリ取り工具が通り抜け可能である場合に、前記端点における前記作業線への進入角度又は前記作業線からの退避角度を前記作業線に対して鈍角に設定してもよい。これによれば、バリ取り工具が通り抜け可能である場合に適切な進入角度又は退避角度を設定することが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社神戸製鋼所
プレス成形品の製造方法
2日前
株式会社神戸製鋼所
制御情報修正方法、制御情報修正装置、及びプログラム
10日前
株式会社神戸製鋼所
積層計画情報生成装置及び積層計画情報生成方法、並びにプログラム
4日前
株式会社神戸製鋼所
フラックス入りワイヤ
11日前
株式会社神戸製鋼所
タブ用アルミニウム合金塗装板
5日前
個人
方向検出器
3日前
積水樹脂株式会社
磁性シート
1か月前
ugo株式会社
移動体
3日前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
無人走行体
1か月前
株式会社豊田自動織機
自動走行体
2か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
トヨタ自動車株式会社
自律移動体
2日前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
搬送ロボット
16日前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
搬送システム
26日前
オムロン株式会社
自律作業システム
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
トヨタ自動車株式会社
自律移動システム
2日前
トヨタ自動車株式会社
ロボットシステム
26日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
位置推定システム
2日前
株式会社栗本鐵工所
操作装置
17日前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社FUJI
工作機械の操作システム
9日前
東芝ライテック株式会社
管理システム
1か月前
株式会社デンソー
電子制御装置
2か月前
株式会社ダイフク
物品搬送設備
26日前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社ダイフク
物品搬送設備
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
16日前
株式会社栗本鐵工所
触覚提示装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ