TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024156560
公報種別
公開特許公報(A)
公開日
2024-11-06
出願番号
2023071135
出願日
2023-04-24
発明の名称
同期モータの制御装置
出願人
株式会社ニッキ
代理人
弁理士法人平和国際特許事務所
主分類
H02P
21/22 20160101AFI20241029BHJP(電力の発電,変換,配電)
要約
【課題】同期モータの制御装置について、あらゆる回転領域で安定的に電流制御を行えるようにする。
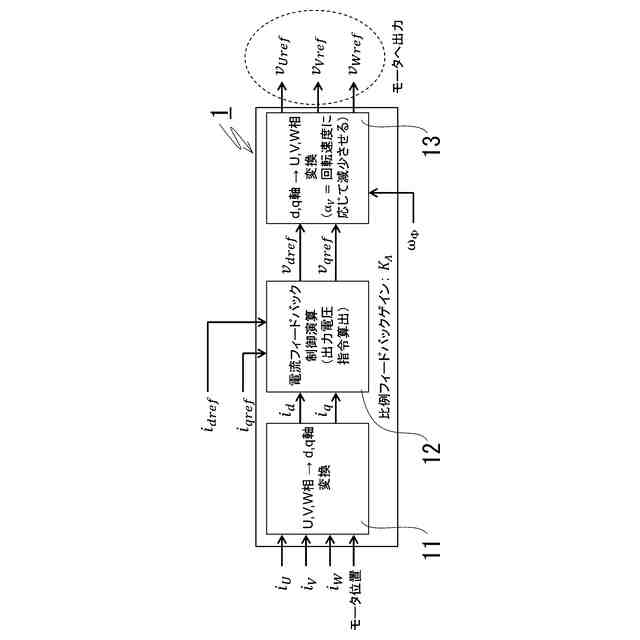
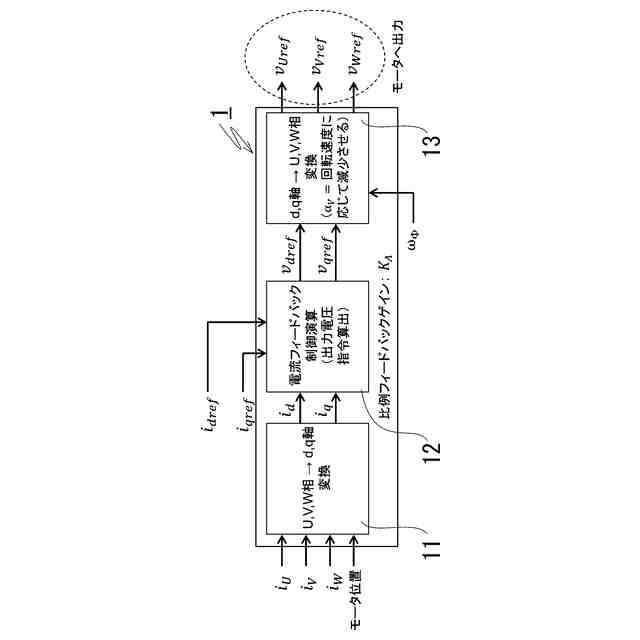
【解決手段】三相電流又はモータ位置からd軸電流及びq軸電流に変換する電流変換手段11と、d軸電流及びq軸電流からd軸電圧指令値及びq軸電圧指令値を算出する電流フィードバック制御演算手段12と、d軸電圧指令値及びq軸電圧指令値を三相電圧指令値に変換する電圧指令値変換手段13とを備え、三相電圧指令値に基づいて同期モータに出力しながらd軸電流を流すd軸電圧の出力ベクトルが回転子の磁界方向からずれる角度を縮小する補正係数を用いてd軸電圧及q軸電圧の出力ベクトルの補正を行う同期モータの制御装置1において、回転速度の上昇に応じて補正係数を減少させながら電圧の出力を回転子の磁界方向に一致するd軸電圧及びq軸電圧よりも遅らせて高速回転時の電流の発振を抑制するものとした。
【選択図】図1
特許請求の範囲
【請求項1】
複数のスイッチング素子からなるインバータと、同期モータの三相電流又はモータ位置から前記同期モータの回転子の磁界方向に同期するベクトルで表したd軸電流及びq軸電流に変換する電流変換手段と、前記d軸電流及び前記q軸電流から電流フィードバッグ制御を用いてd軸電圧指令値及びq軸電圧指令値を算出する電流フィードバック制御演算手段と、前記d軸電圧指令値及び前記q軸電圧指令値を三相電圧指令値に変換する電圧指令値変換手段とを備え、前記三相電圧指令値に基づいて前記スイッチング素子をオン・オフ制御しながら前記同期モータに出力を行うとともに、前記磁界方向に一致した磁界を発生させるようにd軸電流を流すd軸電圧の出力ベクトルが前記磁界方向からずれる角度を縮小するために予め定めた補正係数を用いながら、前記d軸電圧及びこれに直交するq軸電圧の出力ベクトルの補正を行う同期モータの制御装置において、
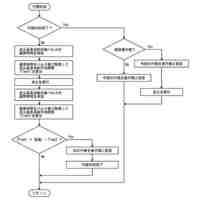
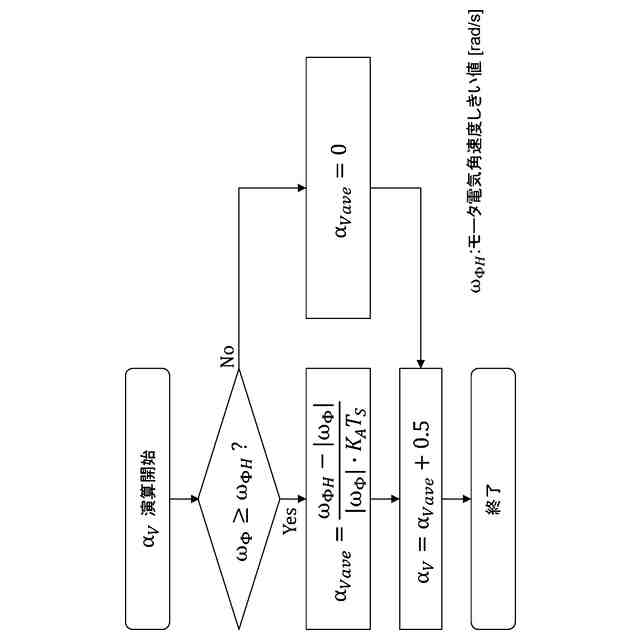
前記同期モータの回転速度の上昇に応じて前記補正係数を減少させながら、電圧の出力を前記磁界方向に一致した磁界を発生させるd軸電圧及びq軸電圧よりも遅らせる制御を実行することにより、高速回転時における電流の発振を抑制することを特徴とする同期モータの制御装置。
続きを表示(約 110 文字)
【請求項2】
前記補正係数の減少は、前記同期モータの電気角速度が所定のしきい値を上回ったことを検知した際に、前記補正係数に所定の負の値を加えることにより行われる、ことを特徴とする請求項1に記載の同期モータの制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、同期モータの制御装置に関し、殊に、同期モータにおける実際の磁軸位置と電圧の出力ベクトルとの間で生じるずれを補正する機能を備えた同期モータの制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
同期モータは、入力する交流電圧に同期して回転する電動機であるが、入力する交流電流により形成される回転磁界で回転子が吸引されながらその磁界に追従して回転動作を行うものであり、これに接続した制御装置による制御システムで駆動制御されるのが一般的である。
【0003】
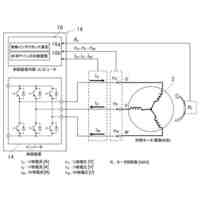
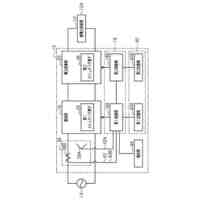
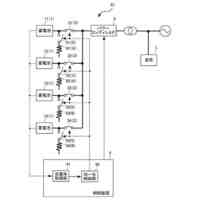
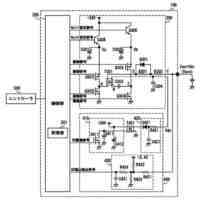
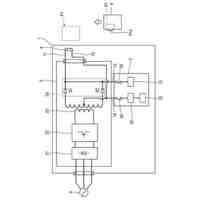
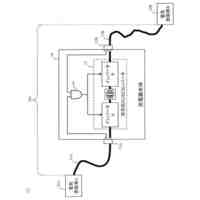
図3は、このような同期モータの制御システムを機能ブロック図で示している。このシステムでは、電流センサから検出又は推定したモータの三相電流(i
U
,i
V
,i
W
)を用い、検出又は推定したモータ位置情報から、同期モータの回転子の磁界方向に同期する軸(ベクトル)で表したd軸電流(i
d
),q軸電流(i
q
)に変換される。このd軸電流、q軸電流が、各々d軸電流指令値(i
dref
)、q軸電流指令値(i
qref
)に一致するように、電流フィードバック制御を用いてd軸電圧指令値(V
dref
)、q軸電圧指令値(V
qref
)を演算する。この電圧を同期モータの三相電圧指令値(V
Uref
,V
Vref
,V
Wref
)に変換して、インバータのスイッチング素子をオン・オフ制御することで、その三相電圧指令値を同期モータに出力する方式となっている。
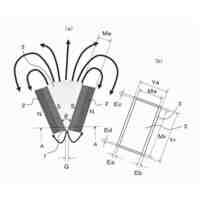
【0004】
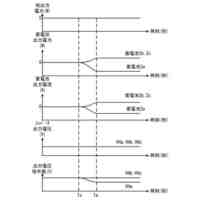
図4は、このような同期モータの制御システムにおいて、電気角で見た同期モータの三相電圧と、d軸電圧及びq軸電圧をベクトル図で示している。この三相電圧は、同期モータの固定子において相互に120°間隔で固定された軸であり、d軸とq軸は回転子の位置に追従する軸である。この回転子には永久磁石が設けられており、この磁石の磁界と同じ向きの磁界を発生させる電流をd軸電流、これに対し直交方向の磁界を発生させる電流をq軸電流と呼び、このd軸電流を流す方向の電圧をd軸電圧、q軸電流を流す方向の電圧をq軸電圧と呼ぶものとする。
【0005】
しかし、上述のように求められたd軸電圧指令、q軸電圧指令を出力する方向は、検出又は推定した位置を用いて演算されるため、同期モータが高回転で作動している間は、図5に示すように、実際の固定子の磁界方向に一致した磁界を発生させるd軸電圧(V
dreal
)、q軸電圧(V
qreal
)との間にずれが生じてしまう。例えば、現在の位置とサンプリング時間Ts秒後の次回の位置では、モータ電気角速度ωΦを用いてωΦTsだけずれることになる。そのため、Ts秒間の平均的なずれを小さくするために、現在位置から0.5ωΦTsだけ進めた位置に電圧を出力する方式が広く採用されている。尚、ここでは補正係数α
V
=0.5として、ωΦTsに乗じて電圧出力軸を補正している。
【0006】
しかしながら、このような従来の同期モータの制御システムにおいて、通常運転時は実際のd軸電圧及びq軸電圧との間のずれが小さくなるようにd軸電圧指令値及びq軸電圧指令値を出力することが可能であるものの、高回転領域では電流が発振傾向になりやすいため、所望する回転速度以上に上げることが困難になるという問題がある。
【0007】
一方、特開2009-183022号公報(特許文献1)には、同期モータに与えられた基準の磁極指令位置と磁極検出位置とを突き合わせて比例積分制御を含む位置/速度制御を行い、回転子の正負の移動方向に応じた磁極位置誤差推定値をモータの電気角位置に加算して制御上の磁極位置を更新することで、同期モータの誤差トルクを減少させる方向に制御を行う方式が提案されている。ところが、同期モータの慣性が大きく変化する場合には、位置/速度制御ゲインを最適に調整するゲイン調整時間が長くなるため、位置/速度制御ゲインの帯域を広く設定せざるを得ず、動作が不安定になってしまうという難点を有している。
【0008】
これに対し、特開2022-020905号公報(特許文献2)において、同期モータの電機子巻線に所定の引込電流を流して回転子又の磁極を引き込んだ時の回転子の移動量に基づいて同期モータの実際の磁極位置を推定する制御装置において、その移動量に所定の可変ゲインを演算して求めた制御角位置を用いるとともに、引込電流をフィードバックするための座標変換を行って、同期モータの通常運転時における前記移動量に加算するべき電機角位相オフセットを演算する方式が提案されている。
【0009】
ところが、この方式では同期モータの制御装置における制御手順が複雑でその処理負担が過大になりやすいことに加え、上述したような同期モータの高回転領域において生じる電流の発振傾向を抑制することが困難である。そのため、簡易な方式で総ての回転領域において安定した制御を行える同期モータの制御システムの開発が望まれていた。
【先行技術文献】
【特許文献】
【0010】
特開2009-183022号公報
特開2022-020905号公報
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ニッキ
同期モータの制御装置
3日前
株式会社ニッキ
4ストロークサイクル単気筒エンジンの行程判別装置
10日前
個人
発電機
3日前
個人
ファスナー式コード束ね
18日前
個人
高電荷低電位電荷搬送体
17日前
株式会社豊田自動織機
回転電機
17日前
個人
回転電気装置及び発電装置
19日前
未来工業株式会社
ゲージ
17日前
株式会社豊田自動織機
回転電機のロータ
18日前
株式会社アイシン
車両用駆動装置
11日前
株式会社コスメック
自立発電装置
19日前
株式会社シマノ
電力供給装置
4日前
富士電機株式会社
半導体装置
3日前
株式会社ダイヘン
電力システム
5日前
トヨタ自動車株式会社
蓄電池制御装置
5日前
株式会社浅羽製作所
通線用先端誘導具
10日前
コーセル株式会社
スイッチング電源装置
17日前
高周波熱錬株式会社
電源装置
18日前
株式会社ダイヘン
蓄電池システム
10日前
日本航空電子工業株式会社
シール構造体
13日前
高周波熱錬株式会社
電源装置
18日前
株式会社ミツバ
端子ユニット
17日前
キヤノン株式会社
電源装置、画像形成装置
4日前
矢崎総業株式会社
グロメット
13日前
GX株式会社
可搬式太陽光発電用電源装置
3日前
トヨタ自動車株式会社
充電制御装置
3日前
ニデック株式会社
ステータ、モータ及びドローン
18日前
シンフォニアテクノロジー株式会社
充電装置
4日前
個人
同期回転電機
10日前
豊田合成株式会社
太陽光発電給電装置
19日前
株式会社ミツバ
モータ制御装置
17日前
マツダ株式会社
モータ
5日前
株式会社オリジン
充電器
13日前
株式会社ミツバ
モータ制御装置
17日前
株式会社ミツバ
モータ制御装置
17日前
本田技研工業株式会社
回転電機
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ