TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067011
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023176645
出願日
2023-10-12
発明の名称
同期モータの制御装置
出願人
株式会社ニッキ
代理人
弁理士法人平和国際特許事務所
主分類
H02P
21/14 20160101AFI20250417BHJP(電力の発電,変換,配電)
要約
【課題】同期モータの制御装置について、巻線インダクタンスを正確に推定して電流フィードバック制御のゲイン調整を自動的且つ高精度に実施可能とする。
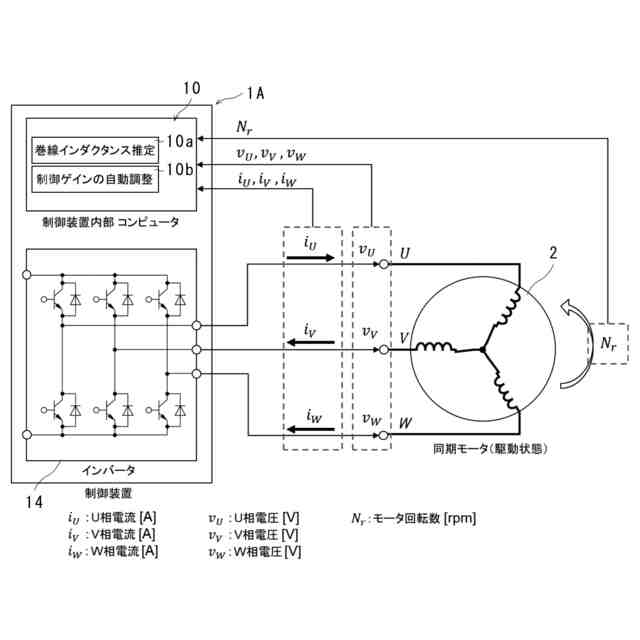
【解決手段】インバータ14と、同期モータ2の三相電流をd軸電流及びq軸電流に変換する電流変換手段11と、d軸電流及びq軸電流からd軸電圧指令値及びq軸電圧指令値を算出する電流フィードバック制御演算手段12と、d軸電圧指令値及びq軸電圧指令値を三相電圧指令値に変換する電圧指令値変換手段13とを備え、三相電圧指令値に基づいて同期モータ2に出力を行う制御装置1Aにおいて、電流フィードバック制御で用いる巻線インダクタンスを、一定の回転状態にある同期モータ2を測定対象としながら、三相電流と、三相電圧と、同期モータ2の回転数とを測定パラメータとして演算することにより推定して、電流フィードバック制御におけるゲイン調整を行うものとした。
【選択図】図1
特許請求の範囲
【請求項1】
複数のスイッチング素子からなるインバータと、検出又は推定した同期モータの三相電流をd軸電流及びq軸電流に変換する電流変換手段と、前記d軸電流及びq軸電流から電流フィードバック制御を用いてd軸電圧指令値及びq軸電圧指令値を算出する電流フィードバック制御演算手段と、前記d軸電圧指令値及びq軸電圧指令値を三相電圧指令値に変換する電圧指令値変換手段とを備え、前記三相電圧指令値に基づいて前記スイッチング素子をオン・オフ制御しながら前記同期モータに出力を行う同期モータの制御装置において、
前記電流フィードバック制御で用いる巻線インダクタンスを、一定の回転状態にある前記同期モータを測定対象として求めるものとして、三相電流と、三相電圧と、前記同期モータの回転数とを測定パラメータとして演算することにより前記巻線インダクタンスを推定しながら、前記電流フィードバック制御におけるゲイン調整を自動的に行う、ことを特徴とする同期モータの制御装置。
続きを表示(約 730 文字)
【請求項2】
前記三相電流は直交座標表示に換算してd軸電流及びq軸電流とされ、
前記三相電圧は直交座標表示に換算してd軸電圧及びq軸電圧とされ、
前記同期モータの回転数は機械角速度に換算されて、各々前記演算に用いられる、ことを特徴とする請求項1に記載の同期モータの制御装置。
【請求項3】
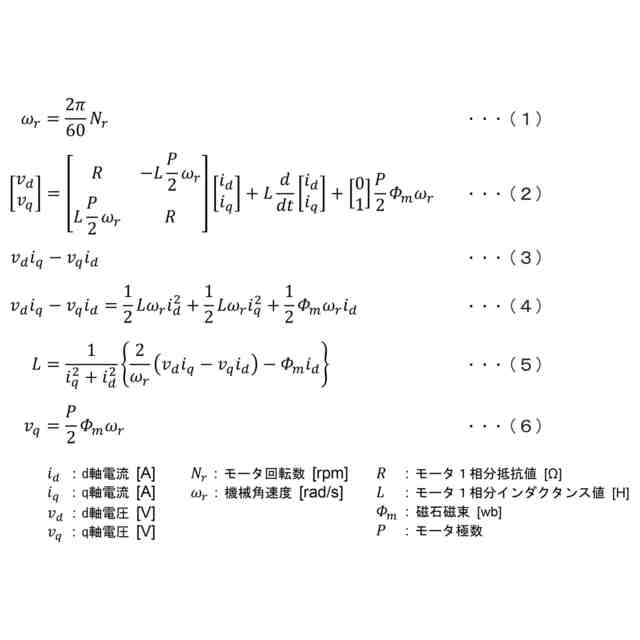
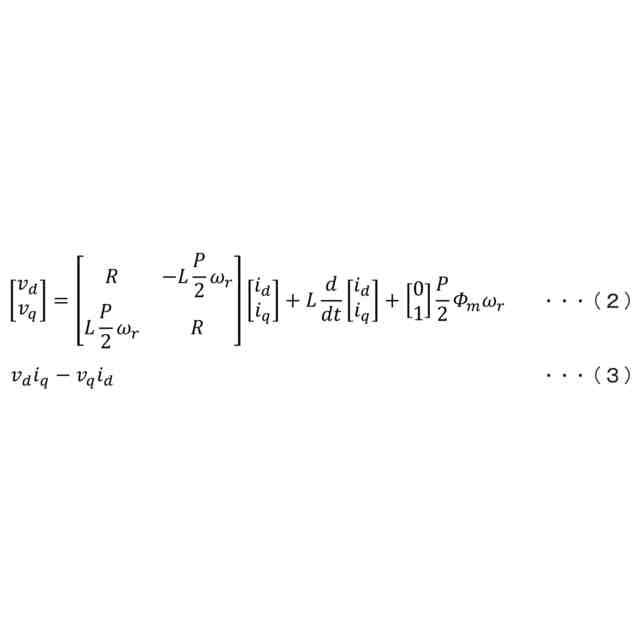
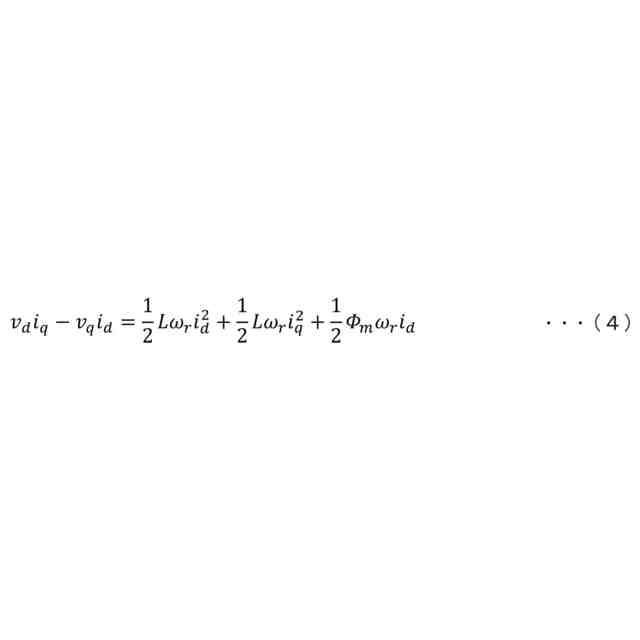
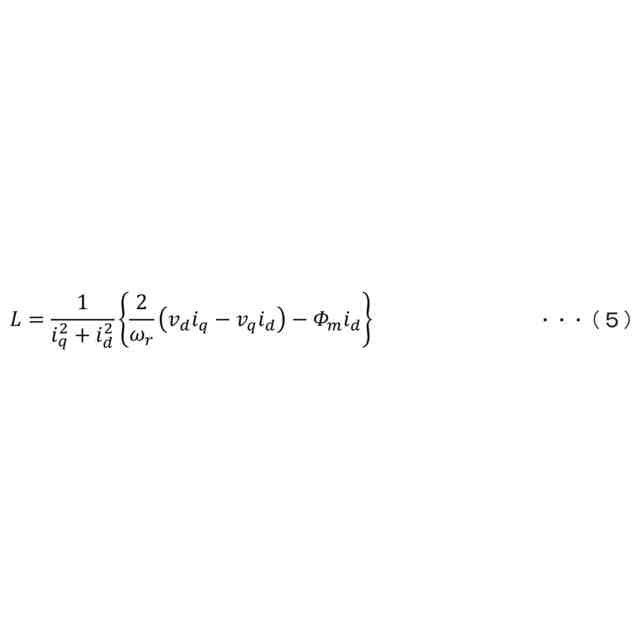
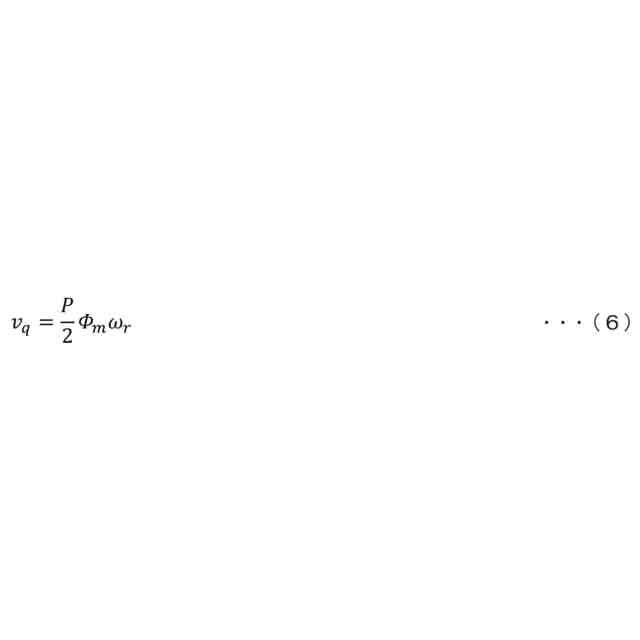
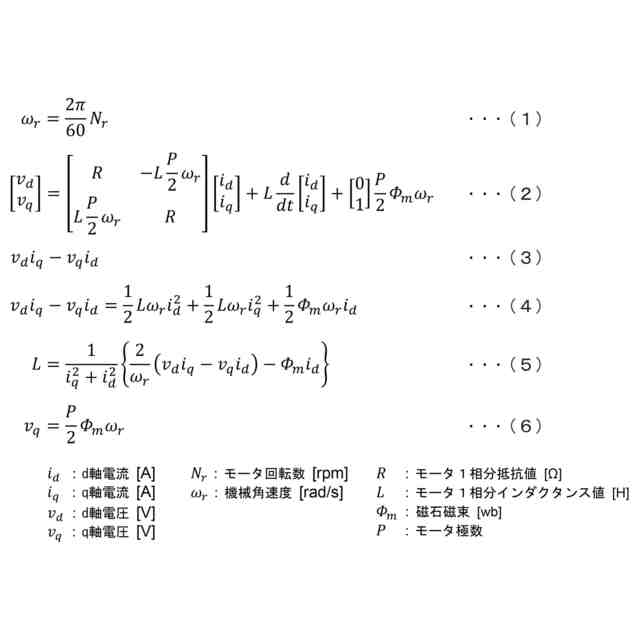
前記巻線インダクタンスは、以下の数式(1)~数式(6)
JPEG
2025067011000009.jpg
115
166
を使用しながら、数式(3)に数式(2)を代入した数式(4)を変形して数式(5)とし、
ここで、
・i
d
及びi
q
は前記d軸電流及びq軸電流であり、
・v
d
及びv
q
はd軸電圧及びq軸電圧であり、
・Nγはモータ回転数であって数式(1)により機械角速度ωγに換算され、
・Rはモータ1相分抵抗値であり、
・Lはモータ1相分インダクタンス値であり、
・Φ
m
は磁石磁束であって数式(6)により導出され、
・Pはモータ極数であり、
前記数式(5)に測定時の機械角速度(ω
γ
)、q軸電流(i
q
)、d軸電流(i
d
)、q軸電圧(v
q
)、d軸電圧(v
d
)、磁石磁束(Φ
m
)を代入することにより、モータ1相分インダクタンス(L)として推定される、ことを特徴とする請求項2に記載の同期モータの制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、同期モータの制御装置に関し、殊に、同期モータの電流フィードバック制御に必要なパラメータである巻線インダクタンスを自動的に推定する機能を備えた同期モータの制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
同期モータは、交流電源の周波数によって定まる同期速度で回転する電動機であり、入力する交流電流により形成される回転磁界で回転子が吸引されながらその磁界に追従して回転動作を行うものであるが、これに接続した制御装置による制御システムで駆動制御されるのが一般的である。
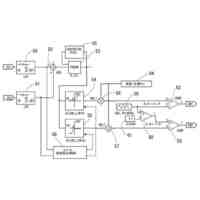
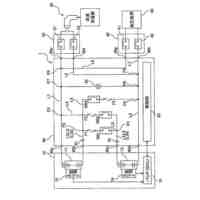
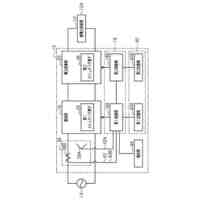
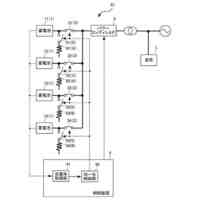
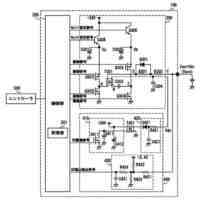
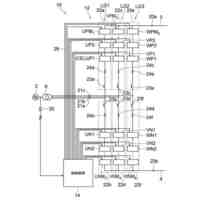
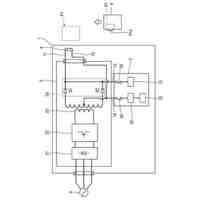
【0003】
図3は、このような同期モータ2の制御システムを機能ブロック図で示している。このシステムでは、同期モータ2の駆動制御を実行する制御装置1B内において、電流センサから検出又は推定した同期モータの三相電流(i
U
,i
V
,i
W
)を用い、或いは推定したモータ位置に同期した軸で表すことで、電流変換手段11によりd軸電流(i
d
),q軸電流(i
q
)に変換される。
【0004】
そのd軸電流(i
d
)、q軸電流(i
q
)が、入力されたd軸電流指令値(i
dref
)、q軸電流指令値(i
qref
)に各々一致するように、電流フィードバック制御演算手段12が電流フィードバック制御によりd軸電圧指令値(V
dref
)、q軸電圧指令値(V
qref
)を演算する。この電圧を、電圧指令値変換手段13が同期モータの三相電圧指令値(V
Uref
,V
Vref
,V
Wref
)に変換して、インバータのスイッチング素子をオン・オフ制御することで、三相電圧指令値を同期モータ2に出力する方式となっている。
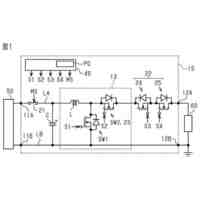
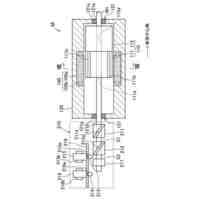
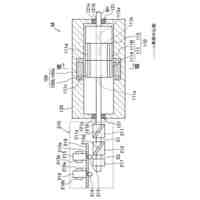
【0005】
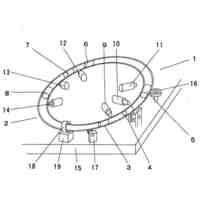
このような従来の同期モータ2の制御システムにおいて、電流フィードバック制御に必要なパラメータである巻線インダクタンスを測定する一般的な手法について、図2を用いながら説明する。この手法においては、LCRメータ3等を使用して静止状態における巻線インダクタンス値の測定を行うものであり、同期モータ2におけるU-V相間、V-W相間、W-U相間を測定し、各測定値の平均を求め、これを1/2倍した値をモータ一相分の巻線インダクタンスとしている。
【0006】
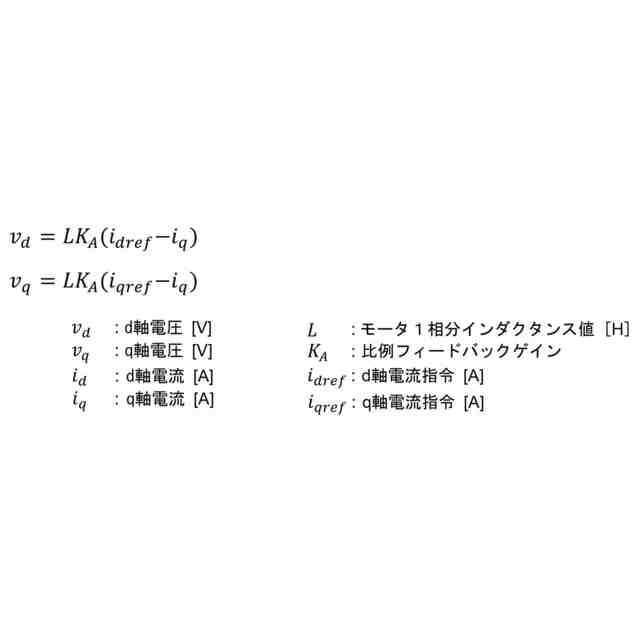
また、上述した制御システムにおける電流フィードバック制御は、以下の数式で表されるが、記述の通り巻線インダクタンスの値により、比例フィードバックゲインが決定されるようになっている。
JPEG
2025067011000002.jpg
43
166
【0007】
しかし、このようなLCRメータ3等を用いた巻線インダクタンスの測定方法は、同期モータ2が静止状態における測定であることから、電流特性に依存する巻線インダクタンス値を正確に測定できずに誤差が大きくなりやすいため、上述した電流フィードバック制御において高精度な制御を実行することが困難である。また、制御対象である同期モータ2の仕様変更に対し、その都度パラメータの測定及び調整作業を実施する必要も生じてしまう。
【0008】
これに対し、国際公開第2009/144957号(特許文献1)の請求項16には、一対の隣り合う固定子の巻線インダクタンス値を、それぞれの固定子巻線に対応する3相インバータから通電される3相交流電流の電流変化率から算出する手法が提案されており、また、国際公開第2011/024935号(特許文献2)の請求項8には、d軸電流及びq軸電流と巻線インダクタンスとの関係を示すマップを記憶した記憶部を備えて、電流指令値算出部で算出された電流指令値と記憶部のマップとから巻線インダクタンス値を算出する手法が提案されている。
【0009】
しかしながら、前述の特許文献1,2で提案された手法によっても、駆動中の同期モータにおける巻線インダクタンス値を、これに接続された制御装置が正確に測定することはできないことから、同期モータの仕様変更があった場合等を含め、その電流フィードバック制御を制御装置が自動的且つ高精度に実行することは困難であると言わざるを得ない。
【先行技術文献】
【特許文献】
【0010】
国際公開第2009/144957号
国際公開第2011/024935号
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電機
3日前
個人
高電荷低電位電荷搬送体
17日前
個人
ファスナー式コード束ね
18日前
株式会社豊田自動織機
回転電機
17日前
個人
回転電気装置及び発電装置
19日前
未来工業株式会社
ゲージ
17日前
ニチコン株式会社
電力変換装置
23日前
株式会社豊田自動織機
回転電機のロータ
18日前
株式会社アイシン
車両用駆動装置
11日前
株式会社コスメック
自立発電装置
19日前
矢崎総業株式会社
配電装置
23日前
富士電機株式会社
半導体装置
3日前
株式会社シマノ
電力供給装置
4日前
株式会社ダイヘン
電力システム
5日前
トヨタ自動車株式会社
蓄電池制御装置
5日前
株式会社浅羽製作所
通線用先端誘導具
10日前
日本航空電子工業株式会社
シール構造体
13日前
株式会社ダイヘン
蓄電池システム
10日前
高周波熱錬株式会社
電源装置
18日前
高周波熱錬株式会社
電源装置
18日前
コーセル株式会社
スイッチング電源装置
17日前
ニデック株式会社
ステータ、モータ及びドローン
18日前
株式会社ミツバ
端子ユニット
17日前
キヤノン株式会社
電源装置、画像形成装置
4日前
矢崎総業株式会社
グロメット
13日前
GX株式会社
可搬式太陽光発電用電源装置
3日前
トヨタ自動車株式会社
充電制御装置
3日前
株式会社TMEIC
電力変換装置
3日前
本田技研工業株式会社
回転電機
17日前
豊田合成株式会社
太陽光発電給電装置
19日前
株式会社村田製作所
電源装置及びプログラム
19日前
株式会社ミツバ
モータ制御装置
17日前
シンフォニアテクノロジー株式会社
充電装置
4日前
株式会社ミツバ
モータ制御装置
17日前
マツダ株式会社
モータ
5日前
マツダ株式会社
モータ
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ