TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024154468
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023068276
出願日
2023-04-19
発明の名称
制御システム、制御方法、及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20241024BHJP(制御;調整)
要約
【課題】自律移動可能な移動ロボットにおいて、壁との接触など走行環境に関連した走行異常が発生した場合、その走行異常状態を周囲に分かり易く知らせることが可能な制御システムを提供する。
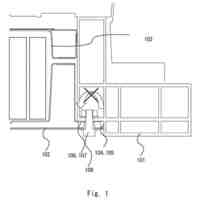
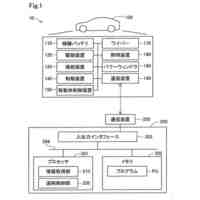
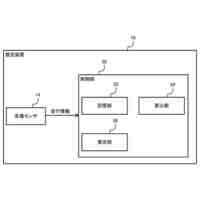
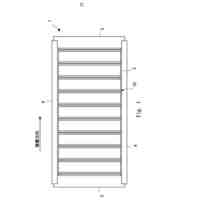
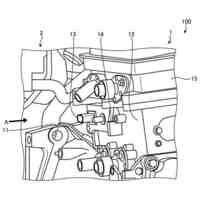
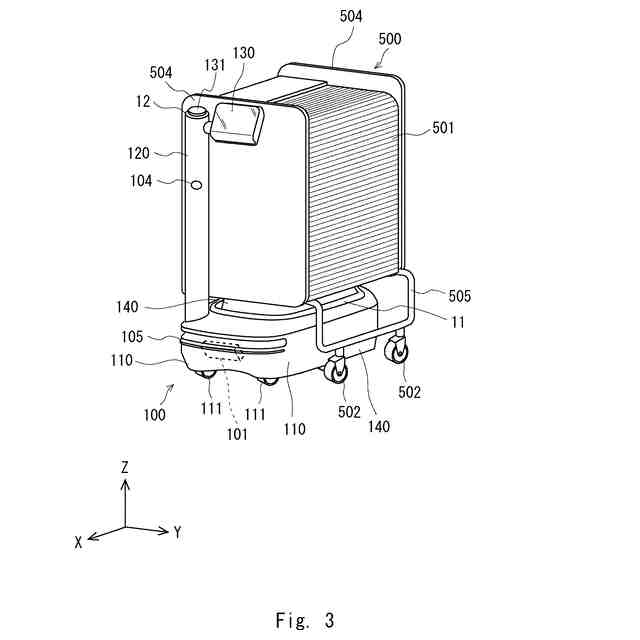
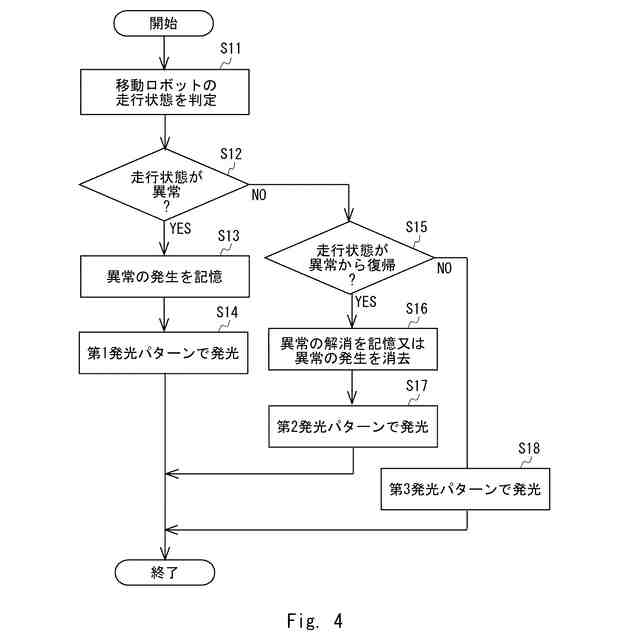
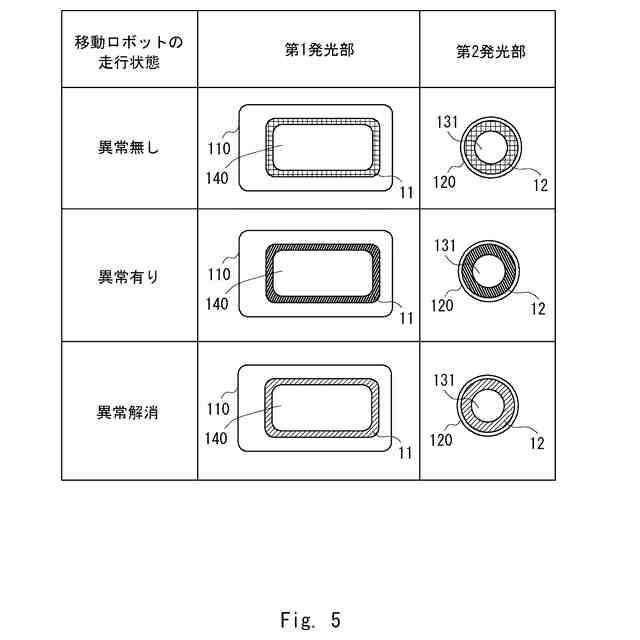
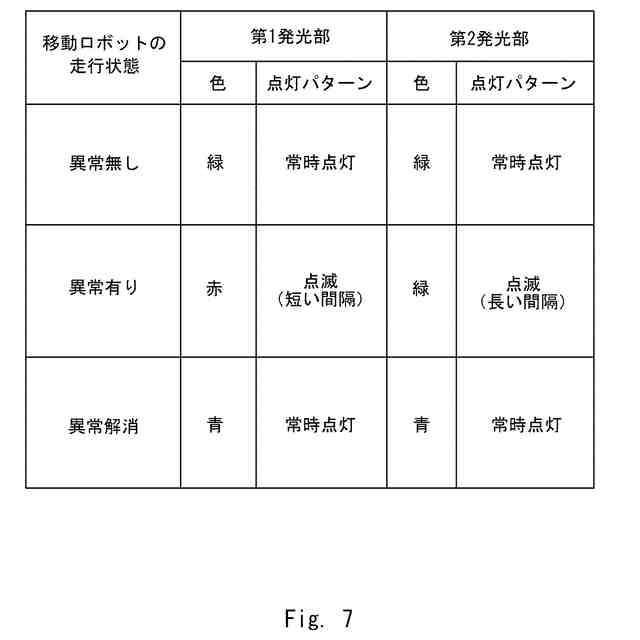
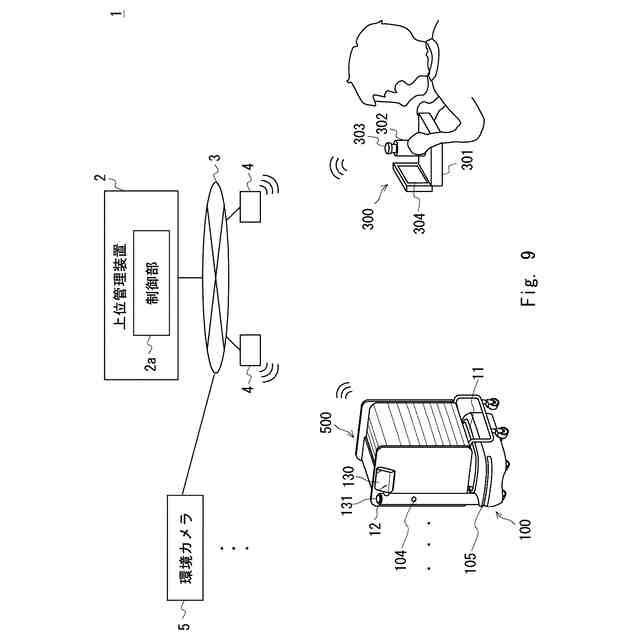
【解決手段】本開示に係る制御システムは、自律移動可能な移動ロボット100を含むシステムを制御する。移動ロボット100は、発光部11,12を備える。上記の制御システムは、移動ロボット100の走行環境に関連した移動ロボット100の走行状態を判定し、少なくとも、判定の結果が異常であった場合と異常でなかった場合とで、発光部11,12を異なる発光パターンで発光させる。
【選択図】図1
特許請求の範囲
【請求項1】
自律移動可能な移動ロボットを含むシステムを制御する制御システムであって、
前記移動ロボットは、発光部を備え、
前記制御システムは、前記移動ロボットの走行環境に関連した前記移動ロボットの走行状態を判定し、少なくとも、判定の結果が異常であった場合と異常でなかった場合とで、前記発光部を異なる発光パターンで発光させる、
制御システム。
続きを表示(約 1,300 文字)
【請求項2】
前記制御システムは、前記判定の結果が前記異常であった場合に、前記発光部を第1の所定発光パターンで発光させ、前記判定の結果が前記異常が解消されたことを示した場合、前記発光部を第2の所定発光パターンで発光させる、
請求項1に記載の制御システム。
【請求項3】
前記移動ロボットは、前記移動ロボットの外周への物体の接触を検知するセンサを備え、
前記制御システムは、前記センサで前記移動ロボットに物体が接触していることが検知されている場合に前記走行状態が前記異常であると判定し、前記センサで前記移動ロボットに物体が接触していることが検知されていない場合に前記走行状態が前記異常ではないと判定する、
請求項1又は2に記載の制御システム。
【請求項4】
前記センサは、前記移動ロボットの外周に設けられたバンパーへの物体の接触を検知するセンサである、
請求項3に記載の制御システム。
【請求項5】
前記制御システムは、前記判定の結果が前記異常であった場合、前記移動ロボットの移動を停止させる、
請求項1又は2に記載の制御システム。
【請求項6】
前記システムは、前記移動ロボットに無線通信で接続可能なサーバを備え、
前記サーバは、少なくとも前記サーバが前記移動ロボットとの通信が不能な場合において、前記移動ロボットをカメラで撮像した画像に基づき、前記画像が示す発光パターンから前記移動ロボットの前記走行状態を判定する、
請求項1又は2に記載の制御システム。
【請求項7】
自律移動可能で且つ発光部を備えた移動ロボットを含むシステムを制御する制御方法であって、
前記移動ロボットの走行環境に関連した前記移動ロボットの走行状態を判定し、
少なくとも、判定の結果が異常であった場合と異常でなかった場合とで、前記発光部を異なる発光パターンで発光させる、
制御方法。
【請求項8】
前記判定の結果が前記異常であった場合に、前記発光部を第1の所定発光パターンで発光させ、前記判定の結果が前記異常が解消されたことを示した場合、前記発光部を第2の所定発光パターンで発光させる、
請求項7に記載の制御方法。
【請求項9】
前記移動ロボットは、前記移動ロボットの外周への物体の接触を検知するセンサを備え、
前記制御方法は、前記センサで前記移動ロボットに物体が接触していることが検知されている場合に前記走行状態が前記異常であると判定し、前記センサで前記移動ロボットに物体が接触していることが検知されていない場合に前記走行状態が前記異常ではないと判定する、
請求項7又は8に記載の制御方法。
【請求項10】
前記センサは、前記移動ロボットの外周に設けられたバンパーへの物体の接触を検知するセンサである、
請求項9に記載の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御システム、制御方法、及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、自律移動可能な移動ロボットが開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第7103689号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の移動ロボットでは、壁との接触など走行環境に関連した走行異常が発生した場合、その走行異常状態を周囲に分かり易く知らせることができない。
【0005】
本開示は、このような問題を解決するためになされたものであり、自律移動可能な移動ロボットにおいて、壁との接触など走行環境に関連した走行異常が発生した場合、その走行異常状態を周囲に分かり易く知らせることが可能な制御システム、制御方法、及びプログラムを提供するものである。
【課題を解決するための手段】
【0006】
本開示に係る制御システムは、自律移動可能な移動ロボットを含むシステムを制御する制御システムであって、前記移動ロボットは、発光部を備え、前記制御システムは、前記移動ロボットの走行環境に関連した前記移動ロボットの走行状態を判定し、少なくとも、判定の結果が異常であった場合と異常でなかった場合とで、前記発光部を異なる発光パターンで発光させる、ものである。前記制御システムによれば、このような構成により、自律移動可能な移動ロボットにおいて、壁との接触など走行環境に関連した走行異常が発生した場合、その走行異常状態を周囲に分かり易く知らせることができる。なお、自律移動の制御では、機械学習によって得られた学習モデルを用いて、移動ロボットを自律移動させることもできる。
【0007】
前記制御システムは、前記判定の結果が前記異常であった場合に、前記発光部を第1の所定発光パターンで発光させ、前記判定の結果が前記異常が解消されたことを示した場合、前記発光部を第2の所定発光パターンで発光させる、ようにしてもよい。前記制御システムは、このような構成により、移動ロボットにおいて、壁との接触など走行環境に関連した走行異常が発生した場合、その走行異常状態を周囲に分かり易く知らせることができ、走行異常状態が解除された場合にも周囲に分かり易く知らせることができる。
【0008】
前記移動ロボットは、前記移動ロボットの外周への物体の接触を検知するセンサを備え、前記制御システムは、前記センサで前記移動ロボットに物体が接触していることが検知されている場合に前記走行状態が前記異常であると判定し、前記センサで前記移動ロボットに物体が接触していることが検知されていない場合に前記走行状態が前記異常ではないと判定する、ようにしてもよい。前記制御システムは、このような構成により、移動ロボットが物体に接触していることを周囲に分かり易く知らせることができ、またその接触が解除された場合にも周囲に分かり易く知らせることができる。
【0009】
前記センサは、前記移動ロボットの外周に設けられたバンパーへの物体の接触を検知するセンサである、ようにしてもよい。前記制御システムは、このような構成により、バンパーにより移動ロボットの本体及び接触した物体を保護することができる。
【0010】
前記制御システムは、前記判定の結果が前記異常であった場合、前記移動ロボットの移動を停止させる、ようにしてもよい。前記制御システムは、このような構成により、走行状態が異常であった場合に移動ロボットの移動を停止できるため、それ以上の最悪な事態の発生を未然に防ぐことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
寝具
7日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
サーバ
今日
トヨタ自動車株式会社
車載機
7日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
電極体
6日前
トヨタ自動車株式会社
移動体
6日前
トヨタ自動車株式会社
ドリル
1日前
トヨタ自動車株式会社
ロータ
今日
トヨタ自動車株式会社
自動車
6日前
トヨタ自動車株式会社
算出装置
今日
トヨタ自動車株式会社
冷却装置
6日前
トヨタ自動車株式会社
蓄電セル
7日前
トヨタ自動車株式会社
推定装置
7日前
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
携帯端末
今日
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
逆浸透膜
6日前
トヨタ自動車株式会社
差動機構
今日
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
算出装置
今日
トヨタ自動車株式会社
蓄電セル
7日前
トヨタ自動車株式会社
回転電機
1日前
トヨタ自動車株式会社
搬送装置
1日前
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
駆動装置
14日前
トヨタ自動車株式会社
分析装置
1日前
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
管理装置
13日前
トヨタ自動車株式会社
固体電池
今日
トヨタ自動車株式会社
端末装置
13日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ