TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024166036
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023189981
出願日
2023-11-07
発明の名称
算出装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B60W
30/18 20120101AFI20241121BHJP(車両一般)
要約
【課題】センサ情報を用いて移動体の位置および向きを精度よく算出できる技術を提供する。
【解決手段】算出装置は、センサ情報と搭載情報とを取得する取得部と、センサ情報を用いて、移動体の位置と向きとの少なくとも一方を算出する算出部と、を備え、算出部は、移動体が搭載測距装置を搭載している第1の場合に、少なくとも搭載測距装置によって取得された搭載測距装置情報をセンサ情報として用いることで、移動体の位置と向きとの少なくとも一方を算出し、移動体が搭載測距装置を搭載していない第2の場合に、移動体とは異なる場所に設置された外部カメラによって取得された画像情報と、移動体とは異なる場所に設置された外部測距装置によって取得された外部測距装置情報と、の少なくとも一方をセンサ情報として用いることで、移動体の位置と向きとの少なくとも一方を算出する。
【選択図】図3
特許請求の範囲
【請求項1】
算出装置であって、
センサによって取得されたセンサ情報と、無人運転により移動可能な移動体に搭載された前記センサとしての搭載測距装置を前記移動体が搭載しているか否かを示す搭載情報と、を取得する取得部と、
前記取得部によって取得された前記センサ情報を用いて、前記移動体の位置と向きとの少なくとも一方を算出する算出部と、を備え、
前記算出部は、
前記移動体が前記搭載測距装置を搭載している第1の場合に、少なくとも前記搭載測距装置によって取得された搭載測距装置情報を前記センサ情報として用いることで、前記移動体の前記位置と前記向きとの少なくとも一方を算出し、
前記移動体が前記搭載測距装置を搭載していない第2の場合に、前記移動体とは異なる場所に設置された前記センサとしての外部カメラによって取得された画像情報と、前記移動体とは異なる場所に設置された前記センサとしての外部測距装置によって取得された外部測距装置情報と、の少なくとも一方を前記センサ情報として用いることで、前記移動体の前記位置と前記向きとの少なくとも一方を算出する、算出装置。
続きを表示(約 2,100 文字)
【請求項2】
請求項1に記載の算出装置であって、
前記取得部は、さらに、前記搭載測距装置の校正が完了しているか否かを示す校正情報を取得し、
前記算出部は、
前記第1の場合において、前記搭載測距装置の校正が完了している場合に、少なくとも前記搭載測距装置情報を前記センサ情報として用いることで、前記移動体の前記位置と前記向きとの少なくとも一方を算出し、
前記第1の場合において、前記搭載測距装置の校正が完了していない場合に、前記搭載測距装置情報を前記センサ情報として用いることなく、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として用いることで、前記移動体の前記位置と前記向きとの少なくとも一方を算出する、算出装置。
【請求項3】
請求項1に記載の算出装置であって、
前記第1の場合に、
前記取得部は、前記搭載測距装置情報に加えて、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として取得し、
前記算出部は、前記搭載測距装置情報を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、
(i)前記搭載測距装置情報を用いて算出された前記移動体の前記位置と、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記位置と、の差が予め定められた位置閾値以上である場合と、(ii)前記搭載測距装置情報を用いて算出された前記移動体の前記向きと、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記向きと、の差が予め定められた方向閾値以上である場合と、の少なくとも一方の場合に、前記算出部は、前記センサ情報を用いた前記移動体の前記位置および前記向きの算出を停止する、算出装置。
【請求項4】
請求項1に記載の算出装置であって、さらに、
前記移動体の動作を制御するための制御信号を生成する信号生成部と、
前記信号生成部によって生成された前記制御信号を前記移動体に送信する送信部と、を備え、
前記第1の場合に、
前記取得部は、前記搭載測距装置情報に加えて、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として取得し、
前記算出部は、前記搭載測距装置情報を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、
(i)前記搭載測距装置情報を用いて算出された前記移動体の前記位置と、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記位置と、の差が予め定められた位置閾値以上である場合と、(ii)前記搭載測距装置情報を用いて算出された前記移動体の前記向きと、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記向きと、の差が予め定められた方向閾値以上である場合と、の少なくとも一方の場合に、前記信号生成部は、(a)前記移動体を停止させるための停止制御信号と、(b)前記移動体が前記無人運転により移動するときの目的地を、予め定められた目標場所から、前記搭載測距装置を修理する修理処理と前記搭載測距装置を校正する校正処理との少なくとも一方を行うメンテナンス場所に変更するための変更制御信号と、のいずれか一方を前記制御信号として生成する、算出装置。
【請求項5】
請求項1に記載の算出装置であって、さらに、
前記センサの検出精度が低下している可能性があることを示す特定情報をユーザに報知する報知制御部を備え、
前記第1の場合に、
前記取得部は、前記搭載測距装置情報に加えて、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として取得し、
前記算出部は、前記搭載測距装置情報を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、
(i)前記搭載測距装置情報を用いて算出された前記移動体の前記位置と、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記位置と、の差が予め定められた位置閾値以上である場合と、(ii)前記搭載測距装置情報を用いて算出された前記移動体の前記向きと、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記向きと、の差が予め定められた方向閾値以上である場合と、の少なくとも一方の場合に、前記報知制御部は、前記特定情報を前記ユーザに報知する、算出装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、算出装置に関する。
続きを表示(約 4,700 文字)
【背景技術】
【0002】
従来、遠隔制御によって自動走行する車両が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
無人運転によって車両等の移動体を移動させる場合において、移動体の位置や向きを精度よく算出することが望まれている。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の第1形態によれば、算出装置が提供される。算出装置は、センサによって取得されたセンサ情報と、無人運転により移動可能な移動体に搭載された前記センサとしての搭載測距装置を前記移動体が搭載しているか否かを示す搭載情報と、を取得する取得部と、前記取得部によって取得された前記センサ情報を用いて、前記移動体の位置と向きとの少なくとも一方を算出する算出部と、を備え、前記算出部は、前記移動体が前記搭載測距装置を搭載している第1の場合に、少なくとも前記搭載測距装置によって取得された搭載測距装置情報を前記センサ情報として用いることで、前記移動体の前記位置と前記向きとの少なくとも一方を算出し、前記移動体が前記搭載測距装置を搭載していない第2の場合に、前記移動体とは異なる場所に設置された前記センサとしての外部カメラによって取得された画像情報と、前記移動体とは異なる場所に設置された前記センサとしての外部測距装置によって取得された外部測距装置情報と、の少なくとも一方を前記センサ情報として用いることで、前記移動体の前記位置と前記向きとの少なくとも一方を算出する。この形態によれば、第1の場合に、外部測距装置情報および画像情報を用いることなく、搭載測距装置情報を用いて、移動体の位置と向きとの少なくとも一方を算出することができる。このようにすると、第1の場合に、例えば、外部カメラおよび外部測距装置と移動体との距離が大きくなるほどに、移動体の位置および向きの算出精度が低下することを抑制できる。これにより、無人運転によって移動体を移動させる場合において、移動体の位置および向きの算出精度を向上させることができる。
(2)上記形態であって、前記取得部は、さらに、前記搭載測距装置の校正が完了しているか否かを示す校正情報を取得し、前記算出部は、前記第1の場合において、前記搭載測距装置の校正が完了している場合に、少なくとも前記搭載測距装置情報を前記センサ情報として用いることで、前記移動体の前記位置と前記向きとの少なくとも一方を算出し、前記第1の場合において、前記搭載測距装置の校正が完了していない場合に、前記搭載測距装置情報を前記センサ情報として用いることなく、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として用いることで、前記移動体の前記位置と前記向きとの少なくとも一方を算出してもよい。この形態によれば、搭載測距装置の校正が完了していない場合に、搭載測距装置情報を用いることなく、画像情報と外部測距装置情報との少なくとも一方を用いて、移動体の位置と向きとの少なくとも一方を算出することができる。これにより、移動体の位置および向きの算出精度が低下することをより確実に抑制できる。
(3)上記形態であって、前記第1の場合に、前記取得部は、前記搭載測距装置情報に加えて、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として取得し、前記算出部は、前記搭載測距装置情報を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、(i)前記搭載測距装置情報を用いて算出された前記移動体の前記位置と、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記位置と、の差が予め定められた位置閾値以上である場合と、(ii)前記搭載測距装置情報を用いて算出された前記移動体の前記向きと、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記向きと、の差が予め定められた方向閾値以上である場合と、の少なくとも一方の場合に、前記算出部は、前記センサ情報を用いた前記移動体の前記位置および前記向きの算出を停止してもよい。この形態によれば、センサの検出精度が低下している可能性がある場合に、移動体の位置および向きの算出を停止することができる。これにより、精度が低下している可能性のあるセンサ情報を基に、移動体の位置および向きを算出することを回避できる。
(4)上記形態であって、さらに、前記移動体の動作を制御するための制御信号を生成する信号生成部と、前記信号生成部によって生成された前記制御信号を前記移動体に送信する送信部と、を備え、前記第1の場合に、前記取得部は、前記搭載測距装置情報に加えて、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として取得し、前記算出部は、前記搭載測距装置情報を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、(i)前記搭載測距装置情報を用いて算出された前記移動体の前記位置と、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記位置と、の差が予め定められた位置閾値以上である場合と、(ii)前記搭載測距装置情報を用いて算出された前記移動体の前記向きと、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記向きと、の差が予め定められた方向閾値以上である場合と、の少なくとも一方の場合に、前記信号生成部は、(a)前記移動体を停止させるための停止制御信号と、(b)前記移動体が外部からの遠隔制御により走行するときの目的地を、予め定められた目標場所から、前記搭載測距装置を修理する修理処理と前記搭載測距装置を校正する校正処理との少なくとも一方を行うメンテナンス場所に変更するための変更制御信号と、のいずれか一方を前記制御信号として生成してもよい。この形態によれば、センサの検出精度が低下している可能性がある場合に、移動体をより安全に停止させたり、搭載測距装置をメンテナンスしたりすることができる。
(5)上記形態であって、さらに、前記センサの検出精度が低下している可能性があることを示す特定情報をユーザに報知する報知制御部を備え、前記第1の場合に、前記取得部は、前記搭載測距装置情報に加えて、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として取得し、前記算出部は、前記搭載測距装置情報を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、前記画像情報と前記外部測距装置情報との少なくとも一方を前記センサ情報として用いて前記移動体の前記位置と前記向きとの少なくとも一方を算出し、(i)前記搭載測距装置情報を用いて算出された前記移動体の前記位置と、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記位置と、の差が予め定められた位置閾値以上である場合と、(ii)前記搭載測距装置情報を用いて算出された前記移動体の前記向きと、前記画像情報と前記外部測距装置情報との少なくとも一方を用いて算出された前記移動体の前記向きと、の差が予め定められた方向閾値以上である場合と、の少なくとも一方の場合に、前記報知制御部は、前記特定情報を前記ユーザに報知してもよい。この形態によれば、センサの検出精度が低下している可能性があることをユーザに報知することができる。
本開示は、上記の算出装置以外の種々の形態で実現することが可能である。例えば、移動体の位置と向きとの少なくとも一方の算出方法、算出装置の製造方法、算出装置の制御方法、その制御方法を実現するコンピュータプログラム、そのコンピュータプログラムを記録した一時的でない記録媒体等の形態で実現することができる。
【図面の簡単な説明】
【0007】
第1実施形態における算出システムの概略構成を示す図である。
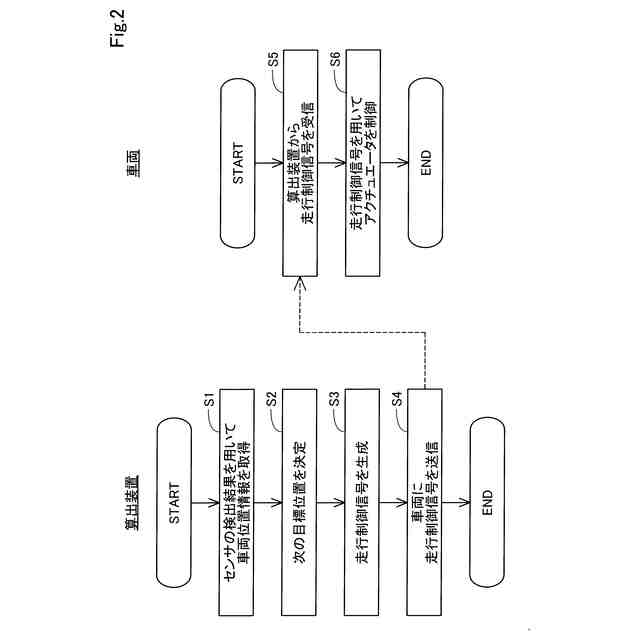
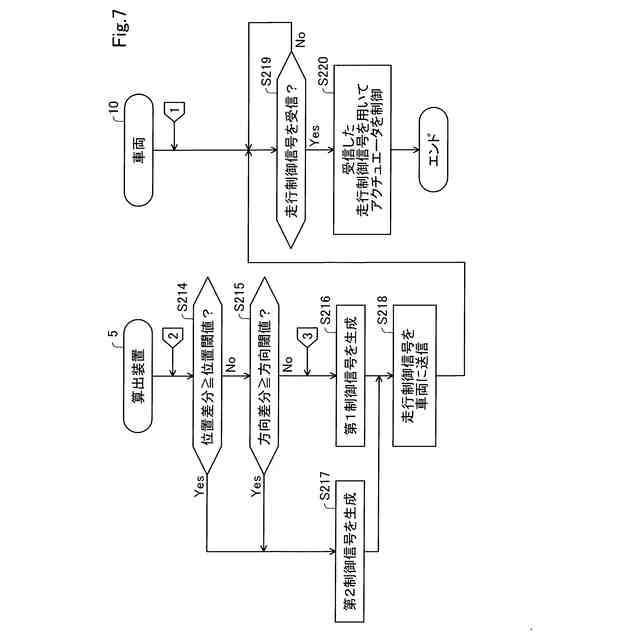
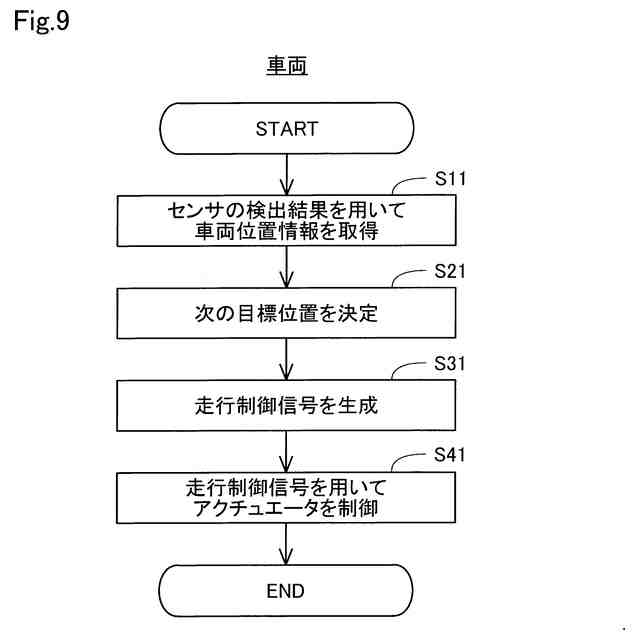
第1実施形態における車両の走行制御の処理手順を示すフローチャートである。
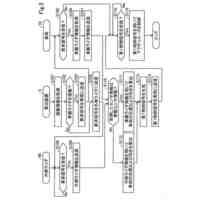
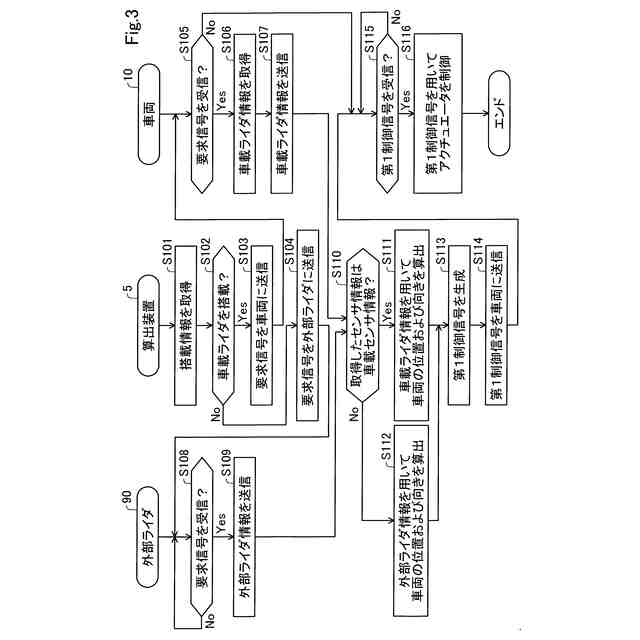
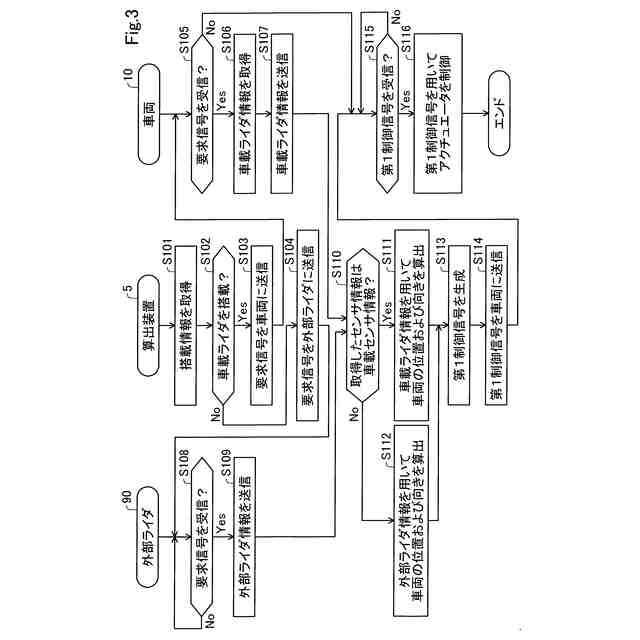
第1実施形態の算出方法および動作制御方法を示すフローチャートである。
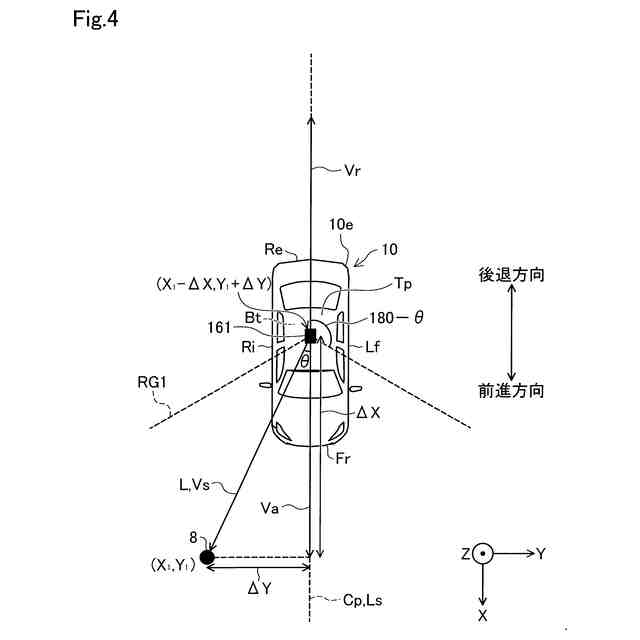
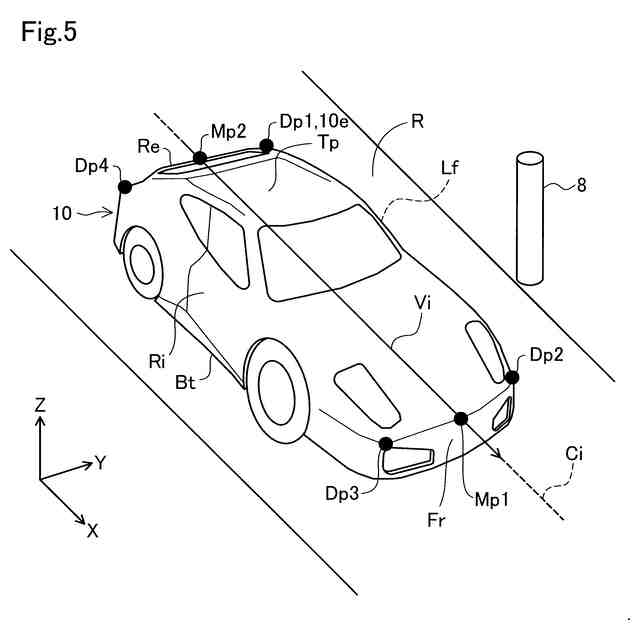
車載ライダ情報を用いた車両の位置および向きの算出方法を示す図である。
外部ライダ情報を用いた車両の向きの算出方法を示す図である。
第2実施形態における算出方法を示すフローチャートである。
第2実施形態における動作制御方法を示すフローチャートである。
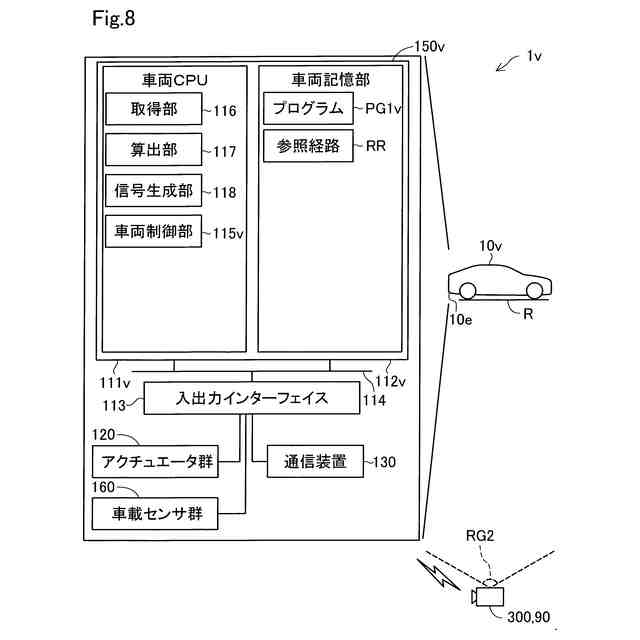
第3実施形態における算出システムの概略構成を示す図である。
第3実施形態における車両の走行制御の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0008】
A.第1実施形態:
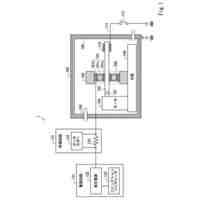
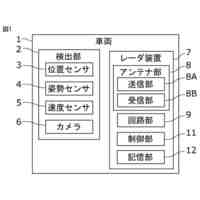
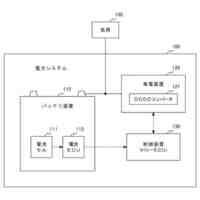
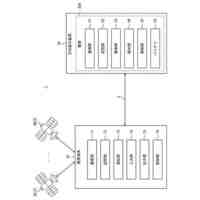
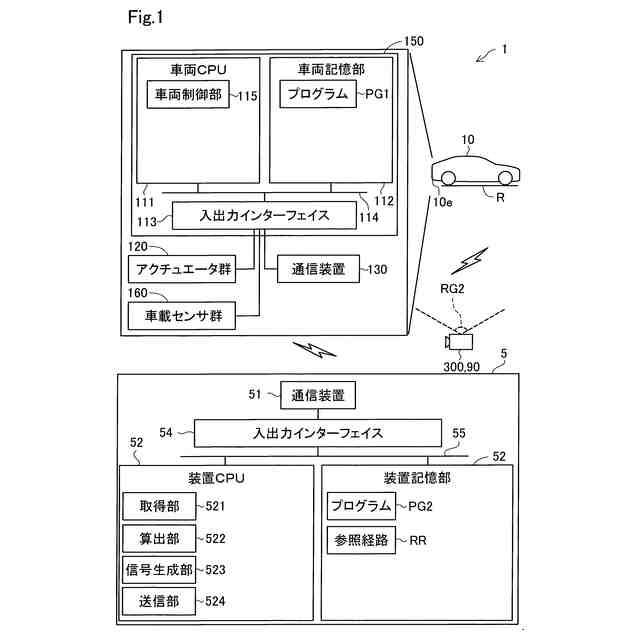
図1は、第1実施形態における算出システム1の概略構成を示す図である。算出システム1は、移動体の位置と向きとの少なくとも一方を算出する。算出システム1は、移動体としての1台以上の車両10と、車両10とは異なる場所に設置された1種類以上の外部センサ300と、算出装置5と、を備える。
【0009】
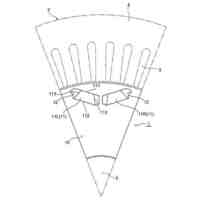
車両10とは異なる場所に設置された1種類以上の外部センサ300は、車両10および車両10の周辺領域の状態を示す俯瞰情報を取得する。外部センサ300は、車両10の外部に位置するセンサである。本実施形態では、算出システム1は、俯瞰情報を取得する外部センサ300として、1台以上の外部ライダ90を備える。外部ライダ90は、車両10とは異なる場所に設置された測距装置としての外部測距装置の一例である。なお、他の実施形態では、測距装置は、ステレオカメラ等の他のセンサであってもよい。
【0010】
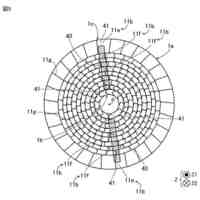
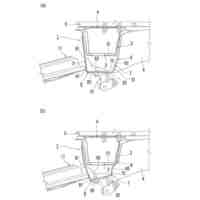
外部ライダ90は、車両10の外部から車両10を検出するライダ(LiDAR:Light Detection And Ranging)である。外部ライダ90は、予め定められた検出範囲RG2にレーザ光を照射して、車両10等の物体によって反射された反射光を検出することで、外部ライダ90と物体との距離および角度、物体の形状等を検出する。外部ライダ90は、取得した外部ライダ情報を算出装置5に送信する。外部ライダ90の設置位置および設置数は、1台以上の外部ライダ90によって走路Rの全体を検出するために、各外部ライダ90の検出範囲RG2および走路Rの周辺領域に存在する物体(障害物)等を考慮して決定される。なお、外部ライダ90の構成は、上記に限られるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
方法
2日前
トヨタ自動車株式会社
ドリル
4日前
トヨタ自動車株式会社
サーバ
2日前
トヨタ自動車株式会社
サーバ
3日前
トヨタ自動車株式会社
ロータ
3日前
トヨタ自動車株式会社
回転電機
4日前
トヨタ自動車株式会社
評価装置
2日前
トヨタ自動車株式会社
電動車両
3日前
トヨタ自動車株式会社
携帯端末
3日前
トヨタ自動車株式会社
蓄電セル
3日前
トヨタ自動車株式会社
蓄電セル
3日前
トヨタ自動車株式会社
算出装置
3日前
トヨタ自動車株式会社
差動機構
3日前
トヨタ自動車株式会社
算出装置
3日前
トヨタ自動車株式会社
搬送装置
4日前
トヨタ自動車株式会社
固体電池
3日前
トヨタ自動車株式会社
レーダ装置
2日前
トヨタ自動車株式会社
水電解装置
3日前
トヨタ自動車株式会社
電池ケース
3日前
トヨタ自動車株式会社
ギアケース
3日前
トヨタ自動車株式会社
レーダ装置
4日前
トヨタ自動車株式会社
電池パック
3日前
トヨタ自動車株式会社
電池パック
3日前
トヨタ自動車株式会社
高圧タンク
3日前
トヨタ自動車株式会社
ユーザ端末
3日前
トヨタ自動車株式会社
電池及び電極
3日前
トヨタ自動車株式会社
オイルタンク
3日前
トヨタ自動車株式会社
表示システム
3日前
トヨタ自動車株式会社
電力システム
4日前
トヨタ自動車株式会社
方向提示装置
3日前
トヨタ自動車株式会社
車両側部構造
3日前
トヨタ自動車株式会社
燃料供給装置
3日前
トヨタ自動車株式会社
情報処理装置
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ