TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024154235
公報種別
公開特許公報(A)
公開日
2024-10-30
出願番号
2023067965
出願日
2023-04-18
発明の名称
位置情報の設定方法、プログラム及び情報処理装置
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/43 20240101AFI20241023BHJP(制御;調整)
要約
【課題】第1方向及び第2方向に単位領域が並ぶレイアウトにおいて、各単位領域の位置の設定精度を向上させる。
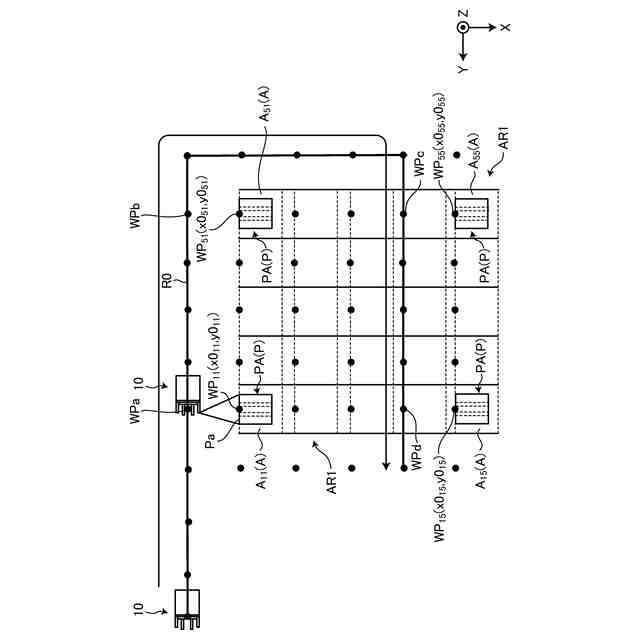
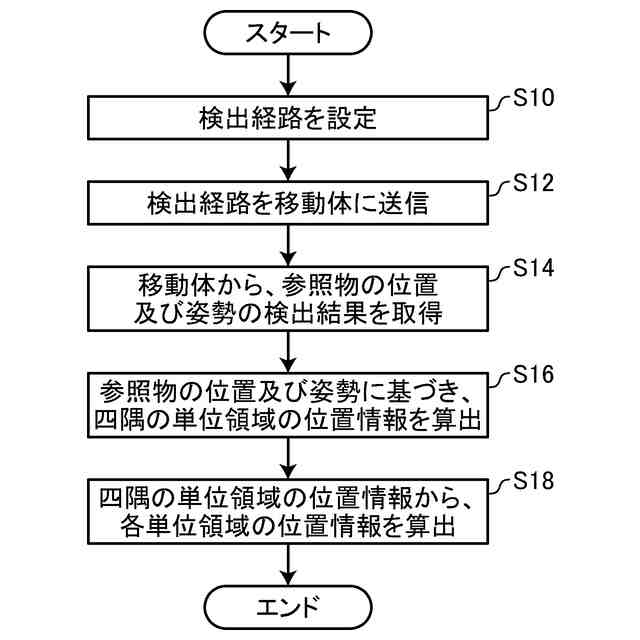
【解決手段】位置情報の設定方法は、対象物が配置される可能性がある単位領域が、第1方向及び第2方向に並んだ配置領域内の、少なくとも1つの単位領域に、位置情報の設定に用いる参照物を配置するステップと、参照物が配置される単位領域から所定距離範囲内を通る、移動体の検出経路を設定するステップと、参照物を検出可能なセンサが搭載された移動体を、検出経路に従って移動させ、センサによって参照物の位置及び姿勢を検出させるステップと、参照物の位置及び姿勢に基づき、配置領域内におけるそれぞれの単位領域の位置情報を算出するステップと、を含む。
【選択図】図6
特許請求の範囲
【請求項1】
対象物が配置される可能性がある単位領域が、第1方向及び前記第1方向に交差する第2方向に並んだ配置領域内の、少なくとも1つの前記単位領域に、位置情報の設定に用いる参照物を配置するステップと、
前記参照物が配置される単位領域から所定距離範囲内を通る、移動体の検出経路を設定するステップと、
前記参照物を検出可能なセンサが搭載された前記移動体を、前記検出経路に従って移動させ、前記センサによって前記参照物の位置及び姿勢を検出させるステップと、
前記参照物の位置及び姿勢に基づき、前記配置領域内におけるそれぞれの前記単位領域の位置情報を算出するステップと、
を含む、
位置情報の設定方法。
続きを表示(約 2,000 文字)
【請求項2】
地図情報における前記単位領域の予測位置情報を取得するステップを更に含み、
前記検出経路を設定するステップにおいては、前記参照物が配置される単位領域の予測位置情報に基づき、前記検出経路を設定し、
前記単位領域の位置情報を算出するステップにおいては、前記地図情報における前記単位領域の位置情報を、前記予測位置情報から、前記参照物の位置及び姿勢に基づいて算出した前記単位領域の位置情報に更新する、請求項1に記載の位置情報の設定方法。
【請求項3】
前記参照物を配置するステップにおいては、前記配置領域のうちの四隅に位置する前記単位領域のそれぞれに、前記参照物を配置し、
前記参照物の位置及び姿勢を検出させるステップにおいては、前記四隅の単位領域に配置されるそれぞれの前記参照物の位置及び姿勢を検出させ、
前記単位領域の位置情報を算出するステップにおいては、前記参照物の位置及び姿勢に基づき、前記四隅の単位領域の位置を結んだ線で囲われた領域が矩形に近づくように、前記四隅の単位領域の位置情報を算出し、前記四隅の単位領域の位置情報に基づき、前記配置領域内におけるそれぞれの前記単位領域の位置情報を算出する、請求項1又は請求項2に記載の位置情報の設定方法。
【請求項4】
前記参照物の位置及び姿勢を検出させるステップにおいては、前記参照物のそれぞれについて、位置及び姿勢を複数回検出させ、
前記単位領域の位置情報を算出するステップにおいては、前記参照物のそれぞれについての複数回の検出結果に基づき、前記四隅の単位領域の位置情報を算出する、請求項3に記載の位置情報の設定方法。
【請求項5】
前記単位領域の位置情報を算出するステップにおいては、
前記四隅の単位領域のそれぞれについて、前記参照物の複数回の検出結果毎に、前記単位領域の推定位置を算出し、
前記四隅の単位領域の推定位置のうちから、前記四隅の単位領域の推定位置を結んだ線で囲われた領域と矩形とのずれ量が出来るだけ小さくなり、かつ、その推定位置と算出される可能性が出来るだけ高くなるような、前記四隅の単位領域の推定位置を選択して、選択した推定位置を、前記四隅の単位領域の位置とする、請求項4に記載の位置情報の設定方法。
【請求項6】
前記単位領域の位置情報に基づいて、前記単位領域が前記第1方向に並んだ領域である設置ラインを通って、前記設置ライン内における1つの前記単位領域へ向かう経路を設定するステップと、
移動体を前記経路に従って移動させるステップと、
前記経路に従って移動する移動体が、前記設置ライン内から前記第2方向側にはみ出すと判断された場合に、前記移動体に搭載されたセンサによって、前記単位領域に配置された対象物の位置及び姿勢を検出させるステップと、
をさらに含み、
前記単位領域の位置情報を算出するステップにおいては、前記対象物の位置及び姿勢の検出結果に基づき、前記単位領域の位置情報を更新する、請求項1又は請求項2に記載の位置情報の設定方法。
【請求項7】
対象物が配置される可能性がある単位領域が、第1方向及び前記第1方向に交差する第2方向に並んだ配置領域内における、前記単位領域の位置情報をコンピュータに設定させるプログラムであって、
前記配置領域内における少なくとも1つの前記単位領域には、位置情報の設定に用いる参照物が配置されており、
前記参照物が配置される単位領域から所定距離範囲内を通る、移動体の検出経路を設定するステップと、
前記参照物を検出可能なセンサが搭載された前記移動体を、前記検出経路に従って移動させ、前記センサによって前記参照物の位置及び姿勢を検出させるステップと、
前記参照物の位置及び姿勢に基づき、前記配置領域内におけるそれぞれの前記単位領域の位置情報を算出するステップと、
をコンピュータに実行させる、
プログラム。
【請求項8】
対象物が配置される可能性がある単位領域が、第1方向及び前記第1方向に交差する第2方向に並んだ配置領域内における、前記単位領域の位置情報を設定する情報処理装置であって、
前記配置領域内における少なくとも1つの前記単位領域には、位置情報の設定に用いる参照物が配置されており、
前記参照物が配置される単位領域から所定距離範囲内を通る、移動体の検出経路を設定する経路設定部と、
前記参照物を検出可能なセンサが搭載された前記移動体が、前記検出経路に従って移動しつつ検出した、前記参照物の位置及び姿勢を取得する検出結果取得部と、
前記参照物の位置及び姿勢に基づき、前記配置領域内におけるそれぞれの前記単位領域の位置情報を算出する位置取得部と、
を含む、
情報処理装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、位置情報の設定方法、プログラム及び情報処理装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
自動で移動して荷物を搬送する移動体が知られている。例えば特許文献1には、対象物が配置される仮置場空エリアまでの走行計画を作成し、作成した走行計画で、仮置場空エリアまで無人荷役車両を自動走行させる旨が記載されている。特許文献1には、仮置場の各エリアを示す仮置場エリアIDと、そのエリアの座標位置を示す区画情報とが予め記憶されている旨が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-135682号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に示すように、対象物が配置される座標位置は、予め設定される場合があるが、設備において実際に対象物が配置される位置に対して、ずれて設定されてしまうおそれがある。また、対象物が配置される単位領域が、第1方向及び第2方向にマトリクス状に並ぶように、設備レイアウトが設定されている場合がある。この場合、実際の位置とのずれが特に大きくなってしまうおそれがある。そのため、第1方向及び第2方向に単位領域が並ぶレイアウトにおいて、各単位領域の位置の設定精度を向上させることが求められている。
【0005】
本開示は、第1方向及び第2方向に単位領域が並ぶレイアウトにおいて、各単位領域の位置の設定精度を向上可能な位置情報の設定方法、プログラム及び情報処理装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る位置情報の設定方法は、対象物が配置される可能性がある単位領域が、第1方向及び前記第1方向に交差する第2方向に並んだ配置領域内の、少なくとも1つの前記単位領域に、位置情報の設定に用いる参照物を配置するステップと、前記参照物が配置される単位領域から所定距離範囲内を通る、移動体の検出経路を設定するステップと、前記参照物を検出可能なセンサが搭載された前記移動体を、前記検出経路に従って移動させ、前記センサによって前記参照物の位置及び姿勢を検出させるステップと、前記参照物の位置及び姿勢に基づき、前記配置領域内におけるそれぞれの前記単位領域の位置情報を算出するステップと、を含む。
【0007】
本開示に係るプログラムは、対象物が配置される可能性がある単位領域が、第1方向及び前記第1方向に交差する第2方向に並んだ配置領域内における、前記単位領域の位置情報をコンピュータに設定させるプログラムであって、前記配置領域内における少なくとも1つの前記単位領域には、位置情報の設定に用いる参照物が配置されており、前記参照物が配置される単位領域から所定距離範囲内を通る、移動体の検出経路を設定するステップと、前記参照物を検出可能なセンサが搭載された前記移動体を、前記検出経路に従って移動させ、前記センサによって前記参照物の位置及び姿勢を検出させるステップと、前記参照物の位置及び姿勢に基づき、前記配置領域内におけるそれぞれの前記単位領域の位置情報を算出するステップと、をコンピュータに実行させる。
【0008】
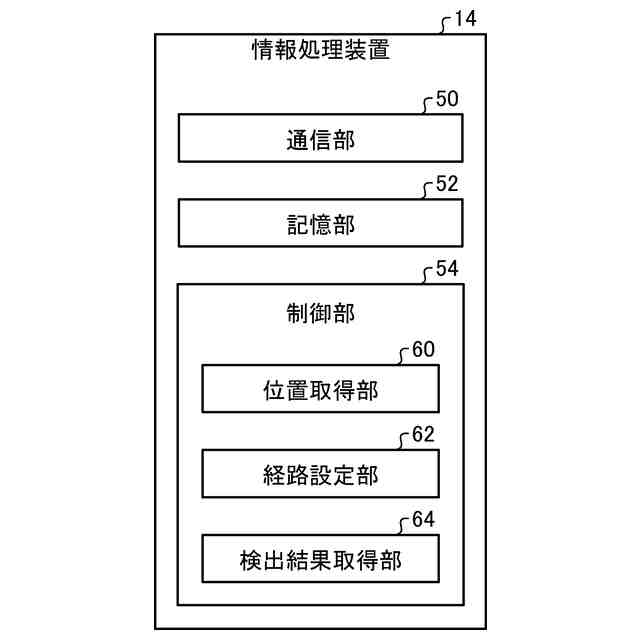
本開示に係る情報処理装置は、対象物が配置される可能性がある単位領域が、第1方向及び前記第1方向に交差する第2方向に並んだ配置領域内における、前記単位領域の位置情報を設定する情報処理装置であって、前記配置領域内における少なくとも1つの前記単位領域には、位置情報の設定に用いる参照物が配置されており、前記参照物が配置される単位領域から所定距離範囲内を通る、移動体の検出経路を設定する経路設定部と、前記参照物を検出可能なセンサが搭載された前記移動体が、前記検出経路に従って移動しつつ検出した、前記参照物の位置及び姿勢を取得する検出結果取得部と、前記参照物の位置及び姿勢に基づき、前記配置領域内におけるそれぞれの前記単位領域の位置情報を算出する位置取得部と、を含む。
【発明の効果】
【0009】
本開示によれば、第1方向及び第2方向に単位領域が並ぶレイアウトにおいて、各単位領域の位置の設定精度を向上できる。
【図面の簡単な説明】
【0010】
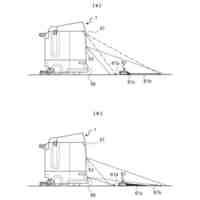
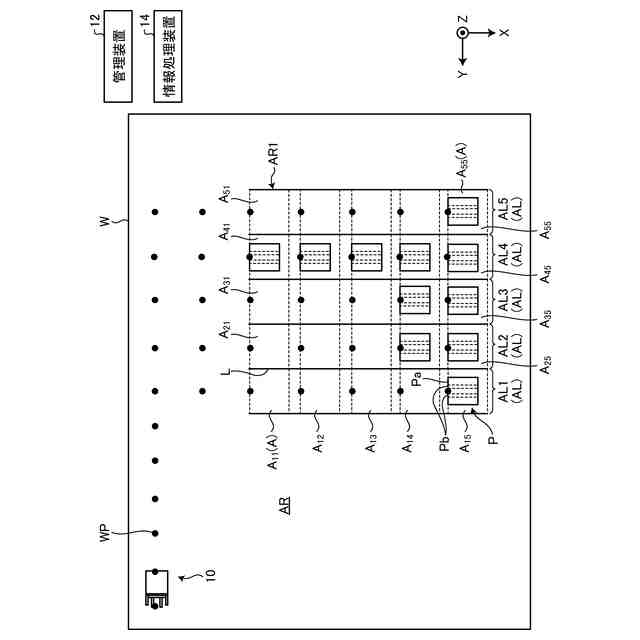
図1は、本実施形態に係る移動制御システムの模式図である。
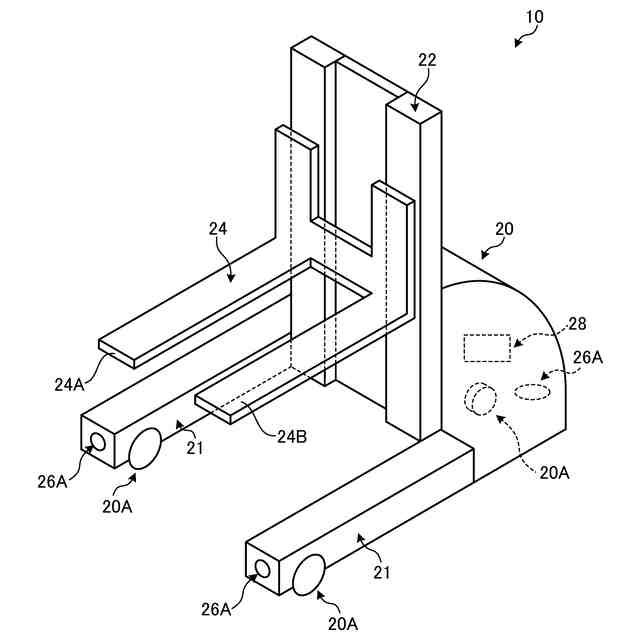
図2は、移動体の構成の模式図である。
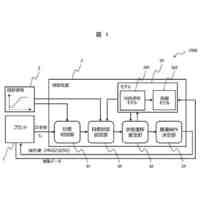
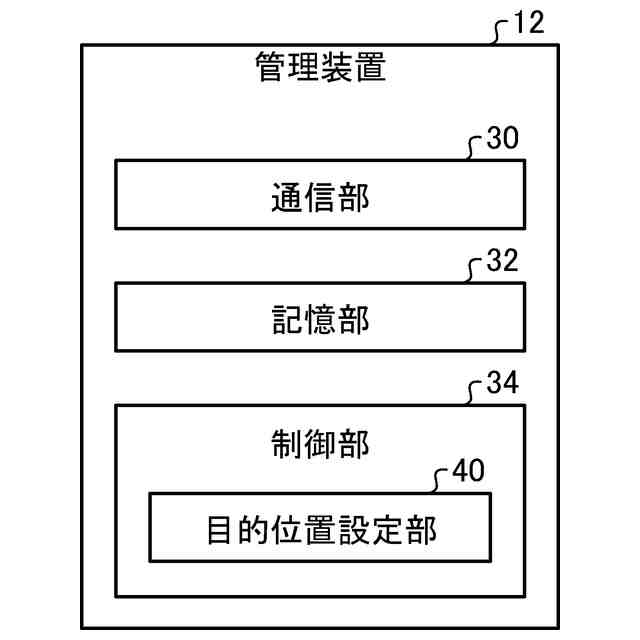
図3は、管理装置の模式的なブロック図である。
図4は、情報処理装置の模式的なブロック図である。
図5は、移動体の制御装置の模式的なブロック図である。
図6は、参照物の検出の一例を示す模式図である。
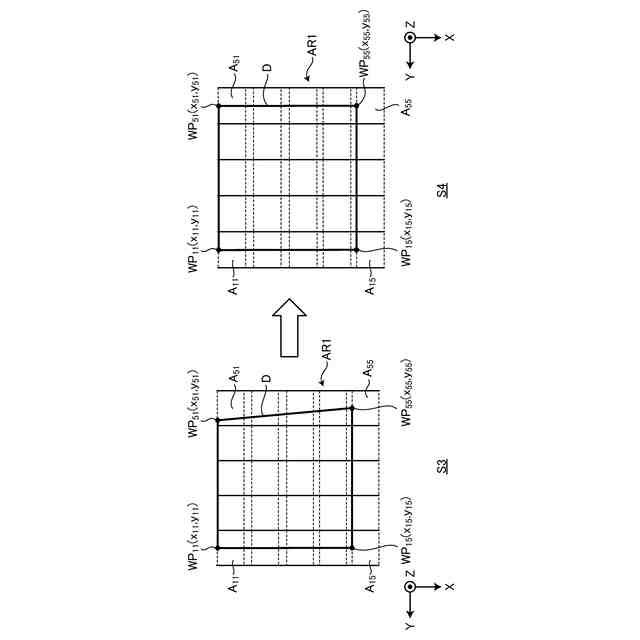
図7は、単位領域の位置情報の算出の一例を説明する模式図である。
図8は、単位領域の位置情報の算出の他の例を説明する模式図である。
図9は、単位領域の位置情報の設定を説明するフローチャートである。
図10は、移動体の単位領域への移動の一例を示す模式図である。
図11は、第2実施形態における単位領域の位置の算出の他の例を説明するグラフである。
図12は、第3実施形態に係る移動体の単位領域への移動の一例を示す模式図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
4日前
積水樹脂株式会社
磁性シート
1か月前
ugo株式会社
移動体
4日前
個人
車両レバー操作装置
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
トヨタ自動車株式会社
自律移動体
3日前
エイブリック株式会社
基準電圧回路装置
1か月前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
搬送ロボット
17日前
トヨタ自動車株式会社
搬送システム
27日前
トヨタ自動車株式会社
自律移動システム
3日前
トヨタ自動車株式会社
位置推定システム
3日前
トヨタ自動車株式会社
ロボットシステム
27日前
株式会社FUJI
工作機械の操作システム
10日前
株式会社栗本鐵工所
操作装置
18日前
株式会社ダイフク
物品搬送設備
27日前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
17日前
株式会社豊田自動織機
移動体制御システム
1か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
25日前
本田技研工業株式会社
運転補助装置
1か月前
横河電機株式会社
モジュール
1か月前
日本信号株式会社
自律走行ロボットシステム
1か月前
株式会社日立製作所
制御装置、制御方法
1か月前
東レエンジニアリング株式会社
位置決め装置
1か月前
愛知製鋼株式会社
異常検知方法及び異常検知システム
1か月前
愛知製鋼株式会社
異常検知方法及び異常検知システム
1か月前
NTN株式会社
自動搬送車の誘導システム
1か月前
株式会社NTTドコモ
総括制御装置
1か月前
トヨタ自動車株式会社
移動体及びその異物付着防止方法
27日前
アルプスアルパイン株式会社
回転操作装置
4日前
ローム株式会社
カレントミラー回路
1か月前
株式会社デンソー
ペダル装置
17日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ