TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024145734
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058216
出願日
2023-03-31
発明の名称
測量方法、測量システムおよびプログラム
出願人
株式会社トプコン
代理人
個人
主分類
G01C
11/36 20060101AFI20241004BHJP(測定;試験)
要約
【課題】移動体に搭載したカメラの撮影画像に基づく三次元データの精度を高める。
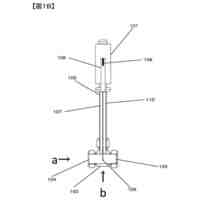
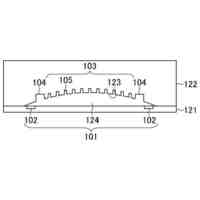
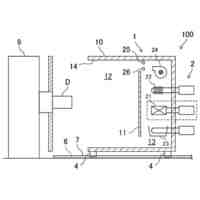
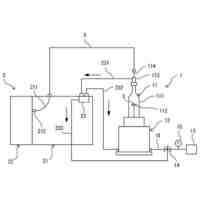
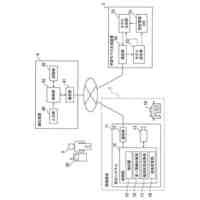
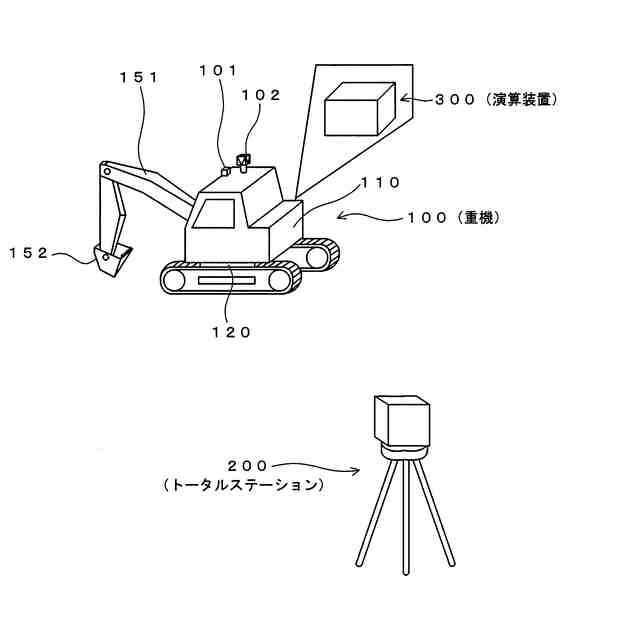
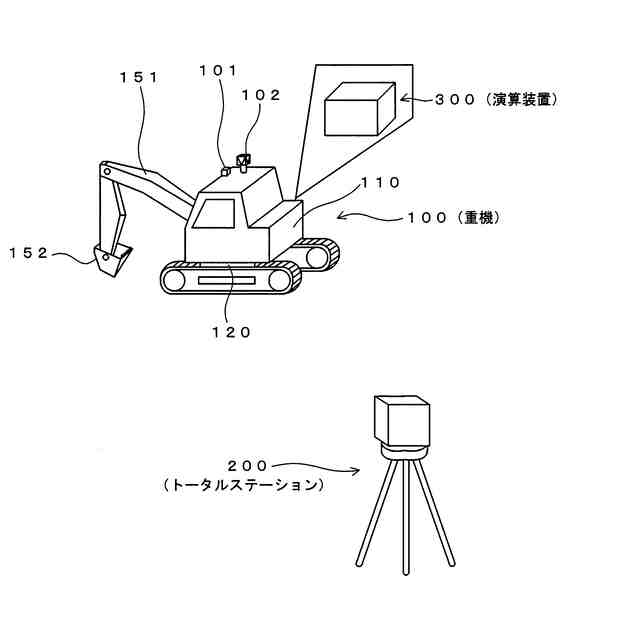
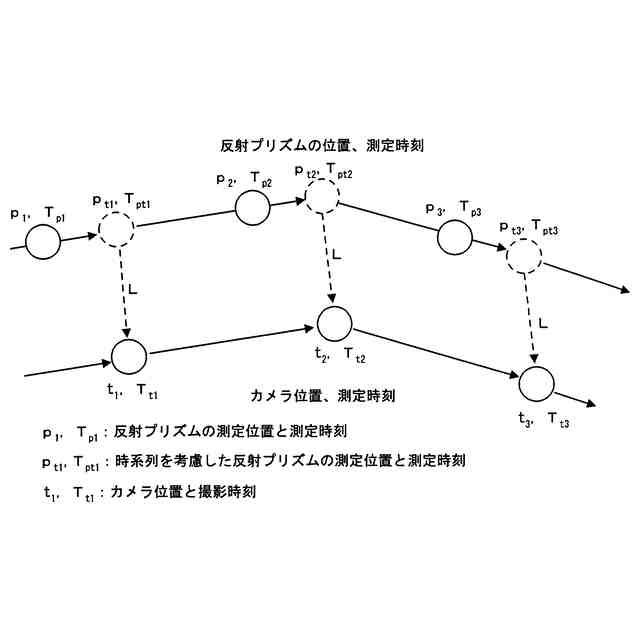
【解決手段】重機100に搭載された状態で移動するカメラ101が撮影した撮影画像の画像データを得、カメラ101に対して固定された特定の部分である反射プリズム102の位置がトータルステーション200により測定され、測定された反射プリズム102の位置に基づきカメラ101の位置を算出し、反射プリズム102の位置の測定時刻とカメラ101の撮影時刻にはズレがあり、カメラ101の位置の算出では、カメラ101の位置を未知数とした調整計算が行われ、この調整計算は、前記時刻のズレに対応した補正量が加えられた反射プリズム101の測定位置に基づいて行われる。
【選択図】図1
特許請求の範囲
【請求項1】
移動するカメラが撮影した撮影画像の画像データを得、
前記カメラに対して固定された特定の部分の位置が測定され、
前記特定の部分の前記測定された位置に基づき前記カメラの位置を算出し、
前記特定の部分の位置の測定時刻と前記撮影画像の撮影時刻にはズレがあり、
前記カメラの位置の算出では、前記カメラの位置を未知数とした調整計算が行われ、
前記調整計算は、前記時刻のズレに対応した補正量が加えられた前記特定の部分の位置に基づいて行われる測量方法。
続きを表示(約 1,000 文字)
【請求項2】
前記調整計算の初期値を求める処理が行われ、
前記初期値を求める処理では、
前記カメラの撮影画像に基づき算出されたローカル座標系における前記カメラの位置と、前記特定の部分のグローバル座標系における位置の動き始めおよび/または動き終わりの対応関係を求める処理が行われる請求項1に記載の測量方法。
【請求項3】
前記調整計算の初期値を求める処理が行われ、
前記初期値を求める処理では、
前記カメラの撮影画像に基づき算出されたローカル座標系における前記カメラの位置の変化と、前記特定の部分のグローバル座標系における位置の変化の対応関係が求められる請求項1に記載の測量方法。
【請求項4】
前記位置の変化は、第1の位置と第2の位置を結ぶ第1の直線と、第2の位置と第3の位置を結ぶ第2の直線とのなす角度によって評価される請求項3に記載の測量方法。
【請求項5】
移動するカメラが撮影した撮影画像の画像データを得る手段と、
前記カメラに対して固定された特定の部分の位置を測定する手段と、
前記特定の部分の前記測定された位置に基づき前記カメラの位置を算出する手段と
を有し、
前記特定の部分の位置の測定時刻と前記撮影画像の撮影時刻にはズレがあり、
前記カメラの位置の算出では、前記カメラの位置を未知数とした調整計算が行われ、
前記調整計算は、前記時刻のズレに対応した補正量が加えられた前記特定の部分の位置に基づいて行われる測量システム。
【請求項6】
コンピュータに読み取らせて実行させるプログラムであって、
コンピュータに
移動するカメラが撮影した撮影画像の画像データの取得と、
前記カメラに対して固定された特定の部分の位置の測定データの取得と、
前記特定の部分の前記測定された位置に基づき前記カメラの位置の算出と
を実行させ、
前記特定の部分の位置の測定時刻と前記撮影画像の撮影時刻にはズレがあり、
前記カメラの位置の算出では、前記カメラの位置を未知数とした調整計算が行われ、
前記調整計算は、前記時刻のズレに対応した補正量が加えられた前記特定の部分の位置に基づいて行われるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、測量技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
測量装置を用いて重機の位置を測定する技術が知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開平8-43093号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
重機にカメラを搭載し、sfm(Structure from Motion)により周囲の三次元データを得る場合、カメラの位置を定める必要がある。本発明は、移動体に搭載したカメラの撮影画像に基づく三次元データの精度を高めることを目的とする。
【課題を解決するための手段】
【0005】
本発明は、移動するカメラが撮影した撮影画像の画像データを得、前記カメラに対して固定された特定の部分の位置が測定され、前記特定の部分の前記測定された位置に基づき前記カメラの位置を算出し、前記特定の部分の位置の測定時刻と前記撮影画像の撮影時刻にはズレがあり、前記カメラの位置の算出では、前記カメラの位置を未知数とした調整計算が行われ、前記調整計算は、前記時刻のズレに対応した補正量が加えられた前記特定の部分の位置に基づいて行われる測量方法である。
【0006】
本発明において、前記調整計算の初期値を求める処理が行われ、前記初期値を求める処理では、前記カメラの撮影画像に基づき算出されたローカル座標系における前記カメラの位置と、前記特定の部分のグローバル座標系における位置の動き始めおよび/または動き終わりの対応関係を求める処理が行われる態様が挙げられる
【0007】
本発明において、前記調整計算の初期値を求める処理が行われ、前記初期値を求める処理では、前記カメラの撮影画像に基づき算出されたローカル座標系における前記カメラの位置の変化と、前記特定の部分のグローバル座標系における位置の変化の対応関係が求められる態様が挙げられる。
【0008】
本発明において、前記位置の変化は、第1の位置と第2の位置を結ぶ第1の直線と、第2の位置と第3の位置を結ぶ第2の直線とのなす角度によって評価される態様が挙げられる。
【0009】
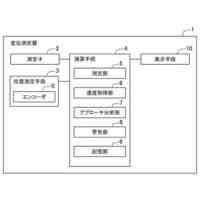
本発明は、移動するカメラが撮影した撮影画像の画像データを得る手段と、前記カメラに対して固定された特定の部分の位置を測定する手段と、前記特定の部分の前記測定された位置に基づき前記カメラの位置を算出する手段とを有し、前記特定の部分の位置の測定時刻と前記撮影画像の撮影時刻にはズレがあり、前記カメラの位置の算出では、前記カメラの位置を未知数とした調整計算が行われ、前記調整計算は、前記時刻のズレに対応した補正量が加えられた前記特定の部分の位置に基づいて行われる測量システムである。
【0010】
本発明は、コンピュータに読み取らせて実行させるプログラムであって、コンピュータに移動するカメラが撮影した撮影画像の画像データの取得と、前記カメラに対して固定された特定の部分の位置の測定データの取得と、前記特定の部分の前記測定された位置に基づき前記カメラの位置の算出とを実行させ、前記特定の部分の位置の測定時刻と前記撮影画像の撮影時刻にはズレがあり、前記カメラの位置の算出では、前記カメラの位置を未知数とした調整計算が行われ、前記調整計算は、前記時刻のズレに対応した補正量が加えられた前記特定の部分の位置に基づいて行われるプログラムである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
甲神電機株式会社
電流センサ
16日前
アズビル株式会社
差圧計
14日前
株式会社小野測器
検出器
19日前
アズビル株式会社
調節計
19日前
アズビル株式会社
差圧計
13日前
株式会社小野測器
測定器
19日前
株式会社チノー
気体流量調整機構
8日前
株式会社アトラス
計量容器
5日前
株式会社トプコン
測量装置
19日前
株式会社チノー
気体流量調整機構
8日前
株式会社トプコン
測量装置
6日前
大和製衡株式会社
組合せ秤
13日前
株式会社カネカ
検出システム
19日前
アズビル株式会社
圧力センサ
13日前
日本碍子株式会社
ガスセンサ
19日前
アズビル株式会社
圧力センサ
8日前
アズビル株式会社
圧力センサ
8日前
株式会社ミツトヨ
変位測定器
13日前
株式会社島津製作所
分光光度計
8日前
株式会社ナリス化粧品
肌状態推定方法
19日前
エイブリック株式会社
電流検出回路。
19日前
日本碍子株式会社
ガスセンサ素子
19日前
日本碍子株式会社
ガスセンサ素子
19日前
東レ株式会社
選択結合性物質固定化担体
13日前
エスペック株式会社
環境形成装置
13日前
日本碍子株式会社
ガスセンサ素子
14日前
日本碍子株式会社
センサ素子
14日前
上海海事大学
河川水位監視システム
6日前
日本碍子株式会社
センサ素子
14日前
株式会社島津製作所
熱分析システム
8日前
個人
レーザ距離計の計測用フォルダ
7日前
マレリ株式会社
推定装置
12日前
セコム株式会社
適応装置
14日前
ローム株式会社
半導体集積回路
12日前
パイロットインキ株式会社
温度管理システム
12日前
株式会社豊田自動織機
電動圧縮機
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ