TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024140395
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023051521
出願日
2023-03-28
発明の名称
車両用運転支援装置
出願人
三菱自動車工業株式会社
代理人
個人
主分類
B60W
50/14 20200101AFI20241003BHJP(車両一般)
要約
【課題】車線維持制御の度合いやステアリングホイール操作の必要性を運転者が適切に認識する上で有利な車両用運転支援装置を提供する。
【解決手段】区画線認識情報と、車両情報と、運転者操舵量とに基づいて、操舵系24を制御する度合いを示す車線維持制御量を0%から100%の範囲で算出し、算出された車線維持制御量に基づいて操舵系24の制御を行なうと共に、運転者操舵量が第1所定値以上であり、かつ、車線維持制御量が第2所定値以下である場合に、表示部に、車線維持制御量が低下傾向にあることを示す第1警告表示を行なうようにした。
【選択図】図1
特許請求の範囲
【請求項1】
操舵系を制御することにより車両を走行車線に沿って走行させる車線維持制御を行なう車両用運転支援装置であって、
前記車両が走行する車線の区画線の認識結果を示す区画線認識情報と、前記車両の状況を示す車両情報と、ステアリングホイールに運転者から入力された運転者操舵量とに基づいて、前記操舵系を制御する度合いを示す車線維持制御量を算出し、算出された車線維持制御量に基づいて前記操舵系の制御を行なう車線維持制御部と、
前記運転者の前方箇所に設けられた表示部と、
前記運転者操舵量が第1所定値以上であり、かつ、前記車線維持制御量が第2所定値以下である場合に、前記表示部に、前記車線維持制御量が低下傾向にあることを示す第1警告表示を行なう警告制御部と、
を備えることを特徴とする車両用運転支援装置。
続きを表示(約 770 文字)
【請求項2】
前記表示部は、前記車線の延在方向に分割された複数の区画領域を表示可能に構成され、
前記警告制御部による前記第1警告表示は、前記複数の区画領域のうち、少なくとも1つの第1区画領域の表示形態を第1状態から前記第1状態と異なる第2状態へ変更することでなされる、
ことを特徴とする請求項1記載の車両用運転支援装置。
【請求項3】
前記警告制御部による前記第1警告表示は、前記運転者操舵量が前記第1所定値よりも高い第3所定値以上であり、且つ、前記車線維持制御量が前記第2所定値よりも小さい第4所定値以下の場合に、前記複数の区画領域のうち前記第1領域及び前記第1領域よりも車両に近い第2領域の双方の表示形態を前記第1状態から前記第2状態へ変更することでなされる、
ことを特徴とする請求項2記載の車両用運転支援装置。
【請求項4】
前記警告制御部による前記第1警告表示は、前記運転者操舵量が大きくなるにつれてまたは前記車線維持制御量が低くなるにつれて、前記複数の区画領域のうち前記車両から遠い前記区画領域から前記車両に近い前記区画領域に向かって順番に前記区画領域の表示形態を第1状態から前記第1状態と異なる第2状態へ変更することでなされる、
ことを特徴とする請求項3記載の車両用運転支援装置。
【請求項5】
前記警告制御部は、前記車線の区画線の認識結果の認識度が認識度第1所定値以下になると、前記区画領域の表示形態を前記第1状態または前記第2状態から前記第1状態および前記第2状態と異なる第3状態に変更することで前記認識度が低下傾向にあることを示す第2警告表示を行なう、
ことを特徴とする請求項2から4の何れか1項記載の車両用運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両用運転支援装置に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
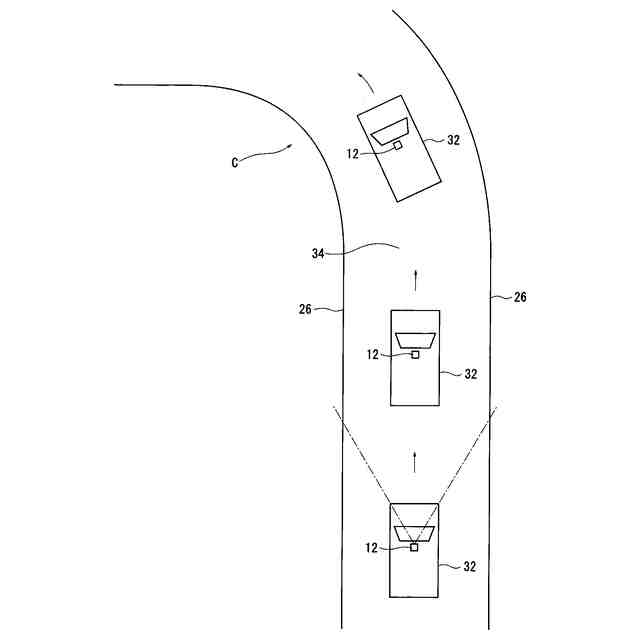
車両に搭載されたカメラによって車両が走行する車線の区画線を撮像し、その区画線認識情報、車速などの車両情報、ステアリングホイールに運転者から入力された運転者操舵量に基づいて操舵機構を制御することにより車両を走行車線の中央に沿って走行させる車線維持制御(Lane keep assist:LKA)を行なう車両用運転支援装置が知られている(特許文献1参照)。
このような車両用運転支援装置では、車両が直線道路を走行する場合は、運転者によるステアリングホイールの操作はほとんど不要であり、車線維持制御の度合いは高くなる。
一方、車両が高速道路のジャンクションなどのようにカーブの曲率が大きい道路を走行する場合は、カメラの性能の限界から区画線認識情報の精度が大きく低下することから、運転者によるステアリングホイールの操作を積極的に行なうことが必要であり、車線維持制御の度合いは低下することになる。
【先行技術文献】
【特許文献】
【0003】
特開2023-19012号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述したように、直線道路や曲率の小さなカーブを走行する場合と、カーブの曲率が大きい道路を走行する場合とで、車両用運転支援装置による車線維持制御の度合いが大きく変化すること、言い換えると、運転者によるステアリングホイールの操作の必要性が大きく変化することを、運転者が正確に認識することは容易ではない。
そのため、例えば、車両が直線道路や曲率が小さなカーブを走行しておりステアリングホイールの操作が必要でない状況下において運転者が無意識にステアリングホイールに力を加えてしまうと、車両用運転支援装置では、運転者によって積極的にステアリングホイールの操作がなされたと推定して車線維持制御の度合いを低く制御することから、車両が車線の中央から幅方向の一方に寄りがちになったり、車両がふらついたりといった不具合が生じることが懸念される。
一方、車両が曲率の大きなカーブを走行する際に、車線維持制御が適切に行われると期待した運転者がステアリングホイールの操作を積極的に行なわないと、上述したようにカメラの性能の限界から区画線認識情報の精度が大きく低下することから、車線維持制御の精度が低下する可能性があり、車両が車線の中央から幅方向の一方に寄りがちになったり、車両がふらついたりといった不具合が生じることが懸念される。
【0005】
前述したように、車線維持制御は、完全な自動運転制御ではなく必要に応じて運転者の操作が必要であるが、運転者は必ずしもこのことを認識しておらず、車線維持制御は自動運転制御または自動運転制御に近いものであり、運転者の操作の必要性が低いものであると期待している場合が多い。
したがって、上述した不具合が生じると、運転者が期待する車線維持制御と、実際に実行される車線維持制御との乖離(期待外れ)をもたらすことから、運転者に違和感を与えることになる。
つまり、このような違和感は、車両用運転支援装置によって実行されている車線維持制御の度合いの高低や、運転者によってステアリングホイールを操作する必要性の高低を運転者が適切に認識することができれば解消される。
本発明は、このような事情に鑑みてなされたものであり、その目的は、車線維持制御の度合いやステアリングホイール操作の必要性を運転者が適切に認識する上で有利な車両用運転支援装置を提供することにある。
【課題を解決するための手段】
【0006】
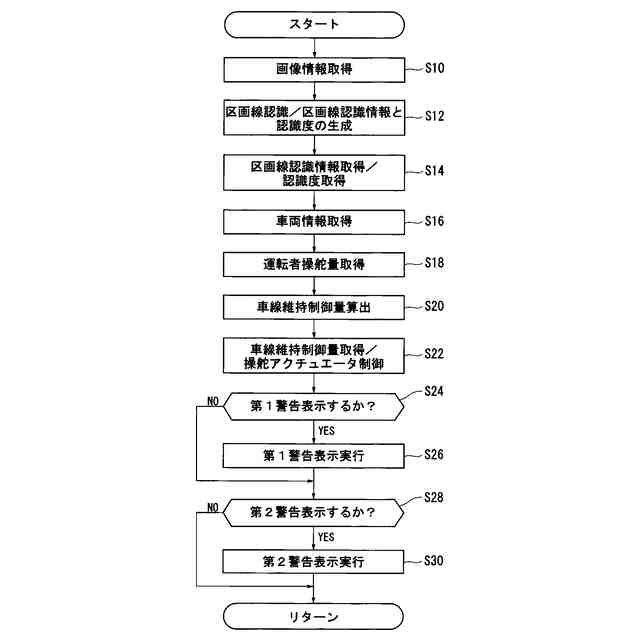
上記目的を達成するために、本発明の一実施の形態は、操舵系を制御することにより車両を走行車線に沿って走行させる車線維持制御を行なう車両用運転支援装置であって、前記車両が走行する車線の区画線の認識結果を示す区画線認識情報と、前記車両の状況を示す車両情報と、ステアリングホイールに運転者から入力された運転者操舵量とに基づいて、前記操舵系を制御する度合いを示す車線維持制御量を算出し、算出された車線維持制御量に基づいて前記操舵系の制御を行なう車線維持制御部と、前記運転者の前方箇所に設けられた表示部と、前記運転者操舵量が第1所定値以上であり、かつ、前記車線維持制御量が第2所定値以下である場合に、前記表示部に、前記車線維持制御量が低下傾向にあることを示す第1警告表示を行なう警告制御部とを備えることを特徴とする。
【発明の効果】
【0007】
本発明の一実施の形態によれば、運転者が無意識にステアリングホイールを操作したときに、車線維持制御量が低下傾向にあることを運転者に的確に認識させることができるので、車線維持制御の度合いやステアリングホイール操作の必要性を運転者が適切に認識する上で有利となる。
【図面の簡単な説明】
【0008】
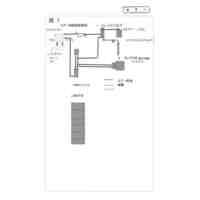
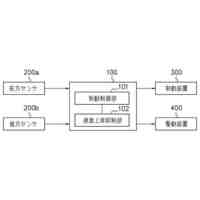
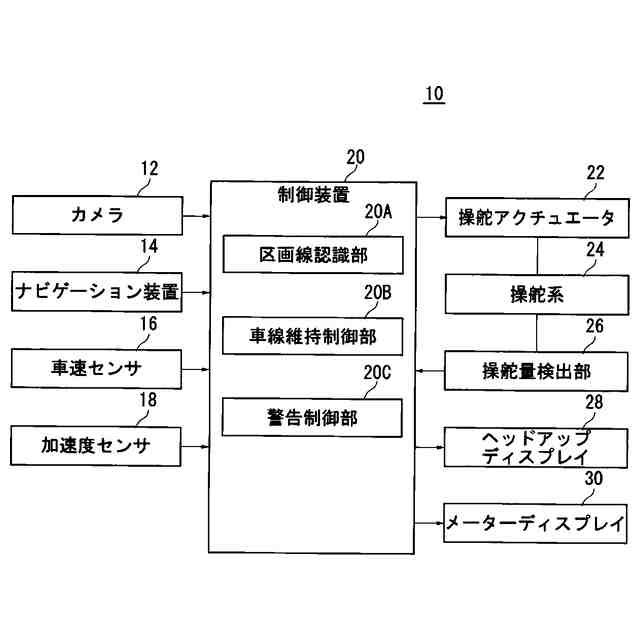
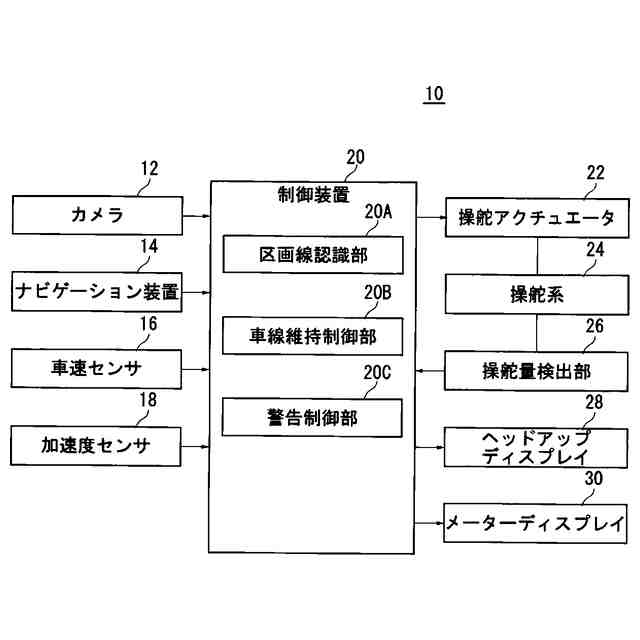
実施の形態に係る車両用運転支援装置の構成を示すブロック図である。
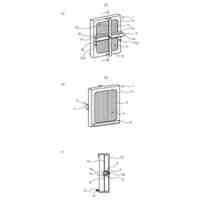
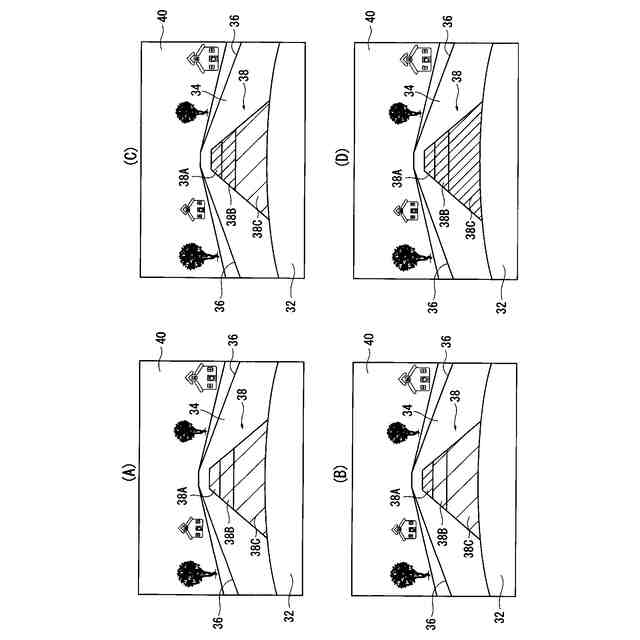
第1警告表示の表示例を示す説明図であり、(A)は第1警告表示がなされていない状態を示し、(B)は1つの区画領域の表示形態が第2状態となった状態を示し、(C)は2つの区画領域の表示形態が第2状態となった状態を示し、(D)は3つの区画領域の表示形態が第2状態となった状態を示す。
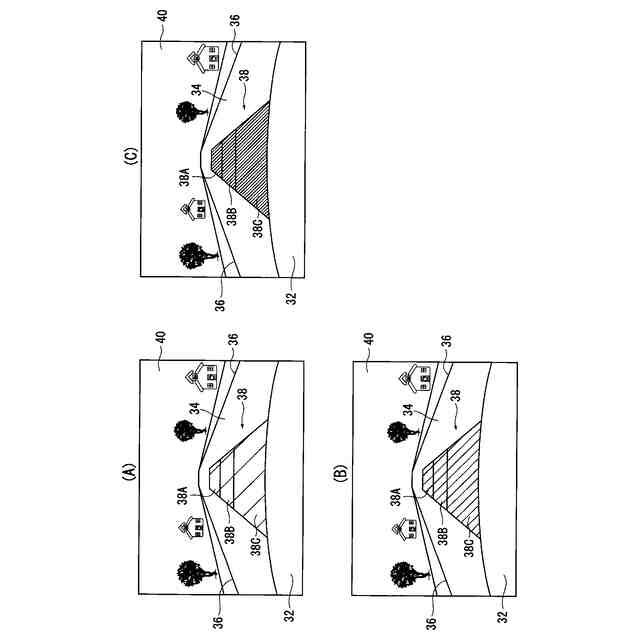
第2警告表示の表示例を示す説明図であり、(A)は第1、第2警告表示がなされていない状態を示し、(B)は第2警告表示がなされ表示形態が第3状態となった状態を示し、(C)は第2警告表示がなされ表示形態が第3状態となりかつ第3状態がより強調された状態を示す。
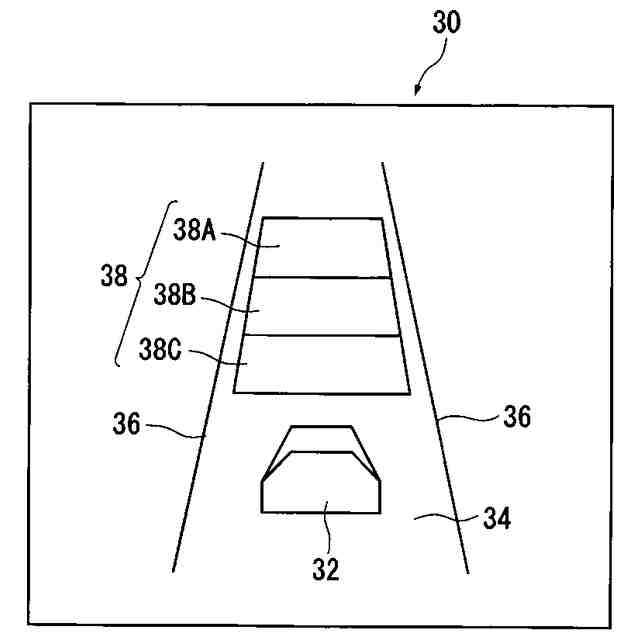
メーターディスプレイの表示例を示す説明図である。
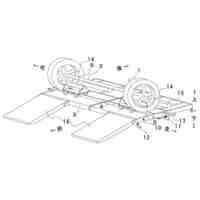
車両と車両が走行する車線(道路)の説明図である。
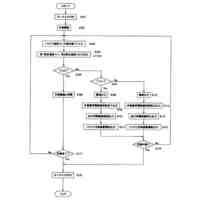
車両用運転支援装置の動作フローチャートである。
【発明を実施するための形態】
【0009】
次に、本発明の実施の形態について図面を参照して説明する。
本実施の形態の車両用運転支援装置は、操舵機構を制御することにより車両を走行車線に沿って走行させる車線維持制御を行なうものである。
なお、本明細書において、車線維持制御とは、レベル0からレベル5の6段階で規定される自動運転レベルのうちのレベル2(運転支援)およびレベル3(部分運転自動化)の制御に相当し、運転主体は人(運転者)である。
すなわち、車線維持制御は、主として高速道路で使用され、運転者の運転を支援し運転者の疲労軽減を目的とするものである。
【0010】
図1に示すように、車両用運転支援装置10は、カメラ12、ナビゲーション装置14、車速センサ16、加速度センサ18、制御装置(制御ECU)20、操舵アクチュエータ22、操舵系24、操舵量検出部26、ヘッドアップディスプレイ28、メーターディスプレイ30などを含んで構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両用エアー傘
3か月前
個人
電池交換式自動車
2か月前
個人
自動車盗難防止装置
3か月前
個人
荷台雨除け装置
3か月前
個人
空気圧調節式ホイール。
14日前
日本精機株式会社
運転支援装置
1か月前
東レ株式会社
車両用エアバッグ
27日前
日本精機株式会社
車外表示装置
6日前
個人
移動手段のミラーカバー。
2か月前
個人
連結式、キャンピングカー
2か月前
株式会社豊田自動織機
電動車両
4か月前
個人
全自動解除式シートベルト
3か月前
日本精機株式会社
表示システム
1か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
3か月前
ダイハツ工業株式会社
車両
13日前
井関農機株式会社
作業車両
3か月前
株式会社SUBARU
車両
7日前
ダイハツ工業株式会社
車両
14日前
個人
車両の座席装置
3か月前
個人
セパレート型キャンピングカー
3か月前
個人
テーブル付きハンドルガード具
3か月前
株式会社コーワ
フィルター清掃装置
2日前
日本化薬株式会社
ガス発生器
6日前
日本化薬株式会社
ガス発生器
2か月前
スズキ株式会社
車両制御装置
1か月前
エムケー精工株式会社
車両処理装置
17日前
アピオ株式会社
荷物用支持具
2か月前
豊田合成株式会社
車両
27日前
豊田合成株式会社
車両
27日前
ダイハツ工業株式会社
レバー
2か月前
株式会社コーワ
フィルター清掃装置
3か月前
株式会社コーワ
フィルター清掃装置
4か月前
個人
視認ペダル操作システム
4か月前
ダイハツ工業株式会社
車両構造
4か月前
三菱マヒンドラ農機株式会社
作業車両
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ