TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024131873
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023042362
出願日
2023-03-16
発明の名称
記号認識装置
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G06V
30/148 20220101AFI20240920BHJP(計算;計数)
要約
【課題】記号の認識精度低下を抑制する記号認識装置を提供する。
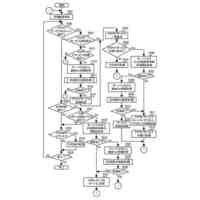
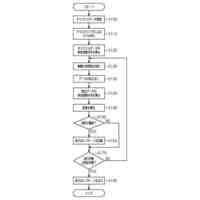
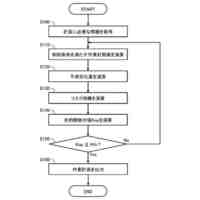
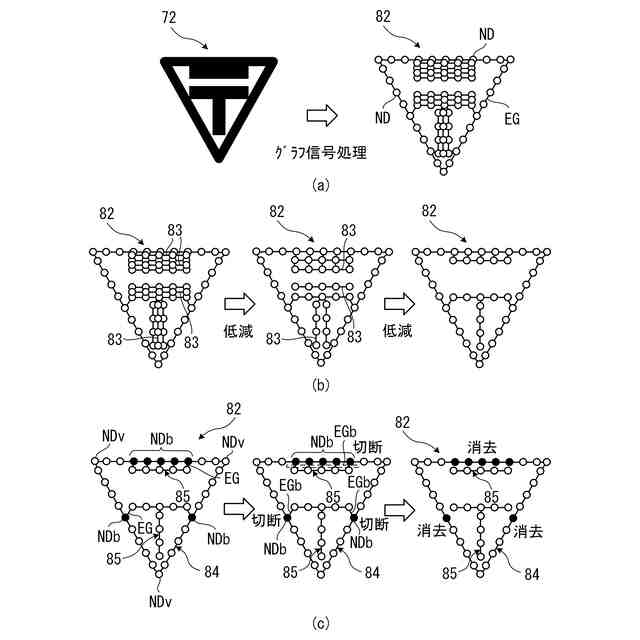
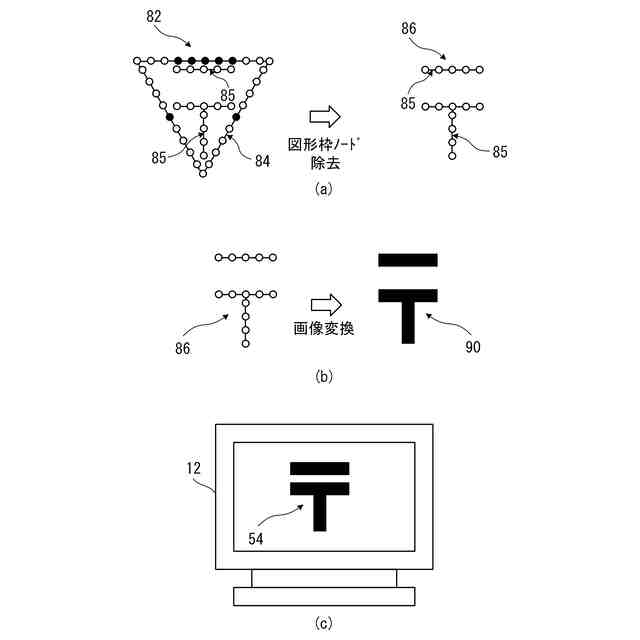
【解決手段】記号認識装置は、複数の画像領域の中から、図形が外接する記号を含む特定の画像領域を切り出す処理と、前記特定の画像領域に対するグラフ信号処理に基づいて、前記特定の画像領域を、複数のノードと前記複数のノードの中で隣接するノード同士をつなぐエッジとによって表現されたグラフに変換する処理と、前記図形に含まれる複数の頂点の最短距離に基づいて、前記図形に相当する前記複数のノードの中の図形ノードと、前記グラフから前記図形ノードを除いた記号ノードと前記エッジでつながる前記図形ノードの一部である境界ノードとを検出する処理と、前記境界ノードと前記記号ノードとをつなぐ境界エッジを切断して消去することにより、前記グラフを前記図形ノードと前記記号ノードとに分離する処理と、前記グラフから前記図形ノードを除去する処理と、を実行する制御部を有する。
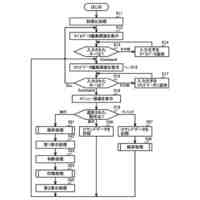
【選択図】図4
特許請求の範囲
【請求項1】
複数の画像領域の中から、図形が外接する記号を含む特定の画像領域を切り出す処理と、
前記特定の画像領域に対するグラフ信号処理に基づいて、前記特定の画像領域を、複数のノードと前記複数のノードの中で隣接するノード同士をつなぐエッジとによって表現されたグラフに変換する処理と、
前記図形に含まれる複数の頂点の最短距離に基づいて、前記図形に相当する前記複数のノードの中の図形ノードと、前記グラフから前記図形ノードを除いた記号ノードと前記エッジでつながる前記図形ノードの一部である境界ノードとを検出する処理と、
前記境界ノードと前記記号ノードとをつなぐ境界エッジを切断して消去することにより、前記グラフを前記図形ノードと前記記号ノードとに分離する処理と、
前記グラフから前記図形ノードを除去する処理と、
を実行する制御部を有する記号認識装置。
続きを表示(約 450 文字)
【請求項2】
前記制御部は、前記複数のノードが前記エッジにより線状につながったノード線の並列配置を前記グラフから検出した場合、前記複数のノードの数を段階的に低減する処理を実行する、
ことを特徴とする請求項1に記載の記号認識装置。
【請求項3】
前記制御部は、前記記号ノードを単独で含む記号グラフに対し、前記グラフ信号処理とは逆のグラフ信号処理を実行することにより、前記記号グラフを前記記号の画像に変換する処理を実行する、
ことを特徴とする請求項1又は2に記載の記号認識装置。
【請求項4】
前記制御部は、前記記号の画像と、機械学習を用いた所定の光学的文字認識処理とに基づいて、前記記号の画像から前記記号を認識する、
処理を実行することを特徴とする請求項3に記載の記号認識装置。
【請求項5】
前記記号は、言葉又は言語音を目に見える形で記号化した文字を含む、
ことを特徴とする請求項1又は2に記載の記号認識装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、記号認識装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
図面上の矩形および三角形を抽出する方式が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開昭61-109375号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、電気図面記号や機械加工の図面記号では、矩形や三角形といった多角形の内側に記号や記号の一種である文字が含まれている場合がある。例えば、電気図面記号では、長方形の内側にインバータを表す文字「INV」が含まれている場合がある。機械加工の図面記号では、六角形の内側に統計的公差を表す文字「ST」が含まれている場合がある。図面記号によっては、逆三角形の内側に郵便記号が含まれている場合もある。
【0005】
このような図面記号においては、記号の一部が図形に外接している場合がある。図形に一部が外接している記号を抽出して認識する場合、図面記号から記号の部分を単独で精度良く判別することができないため、記号の認識精度が低下するおそれがある。
【0006】
そこで、本発明では、記号の認識精度低下を抑制する記号認識装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る記号認識装置は、複数の画像領域の中から、図形が外接する記号を含む特定の画像領域を切り出す処理と、前記特定の画像領域に対するグラフ信号処理に基づいて、前記特定の画像領域を、複数のノードと前記複数のノードの中で隣接するノード同士をつなぐエッジとによって表現されたグラフに変換する処理と、前記図形に含まれる複数の頂点の最短距離に基づいて、前記図形に相当する前記複数のノードの中の図形ノードと、前記グラフから前記図形ノードを除いた記号ノードと前記エッジでつながる前記図形ノードの一部である境界ノードとを検出する処理と、前記境界ノードと前記記号ノードとをつなぐ境界エッジを切断して消去することにより、前記グラフを前記図形ノードと前記記号ノードとに分離する処理と、前記グラフから前記図形ノードを除去する処理と、を実行する制御部を有する。
【0008】
上記構成において、前記制御部は、前記複数のノードが前記エッジにより線状につながったノード線の並列配置を前記グラフから検出した場合、前記複数のノードの数を段階的に低減する処理を実行してもよい。
【0009】
上記構成において、前記制御部は、前記記号ノードを単独で含む記号グラフに対し、前記グラフ信号処理とは逆のグラフ信号処理を実行することにより、前記記号グラフを前記記号の画像に変換する処理を実行してもよい。
【0010】
上記構成において、前記制御部は、前記記号の画像と、機械学習を用いた所定の光学的文字認識処理とに基づいて、前記記号の画像から前記記号を認識する、処理を実行してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
電子機器
13日前
キヤノン株式会社
電子機器
13日前
キヤノン株式会社
電子機器
13日前
キヤノン電子株式会社
通信システム
6日前
トヨタ自動車株式会社
作業判定方法
1日前
トヨタ自動車株式会社
作業評価装置
6日前
トヨタ自動車株式会社
管理システム
8日前
株式会社NURSY
再就職の支援装置
7日前
西松建設株式会社
計測システム
12日前
TDK株式会社
等価回路
8日前
トヨタ自動車株式会社
情報処理システム
1日前
ゼネラル株式会社
RFIDタグ付き物品
2日前
個人
公益寄付インタラクティブシステム
6日前
ジャペル株式会社
登録管理システム
12日前
トヨタ自動車株式会社
情報処理方法
1日前
富士フイルム株式会社
タッチセンサ
6日前
キオクシア株式会社
電子機器
12日前
株式会社インテック
触覚ディスプレイ装置
7日前
大王製紙株式会社
作業管理システム
7日前
株式会社国際電気
支援システム
2日前
ブラザー工業株式会社
ラベルプリンタ
1日前
個人
チャットボットを用いたシステム
12日前
株式会社デンソー
情報処理方法
6日前
富士通株式会社
画像生成方法
5日前
アスエネ株式会社
温室効果ガス排出量管理方法
12日前
株式会社鷺宮製作所
制御システム
12日前
株式会社鷺宮製作所
制御システム
12日前
株式会社鷺宮製作所
制御システム
12日前
甍エンジニアリング株式会社
屋根材買い取りシステム
5日前
日立建機株式会社
作業支援システム
8日前
アスエネ株式会社
温室効果ガス排出量管理方法
12日前
アスエネ株式会社
温室効果ガス排出量管理方法
12日前
アスエネ株式会社
温室効果ガス排出量管理方法
12日前
アスエネ株式会社
温室効果ガス排出量管理方法
12日前
株式会社USEN-ALMEX
サービスロボット
9日前
ミサワホーム株式会社
管理装置及び賃貸システム
7日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ