TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024124447
公報種別
公開特許公報(A)
公開日
2024-09-12
出願番号
2024103821,2022176258
出願日
2024-06-27,2015-12-25
発明の名称
作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20240905BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】走行機体の自動操向制御を用いて作業装置による作業を正確に行うことが可能となる作業車を提供する。
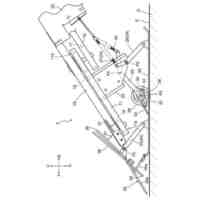
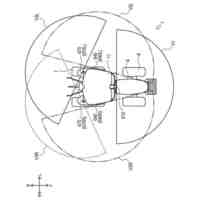
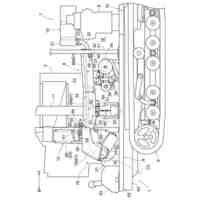
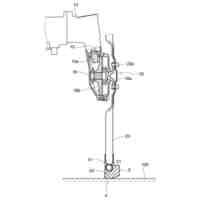
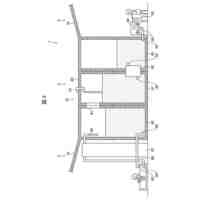
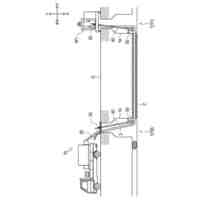
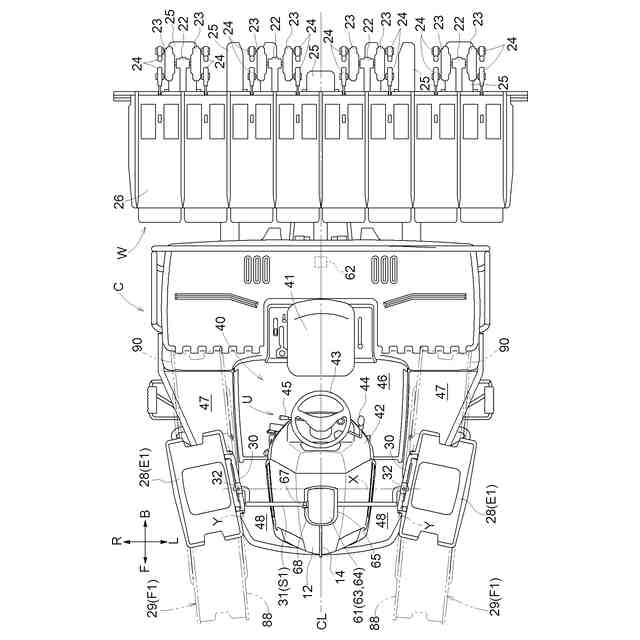
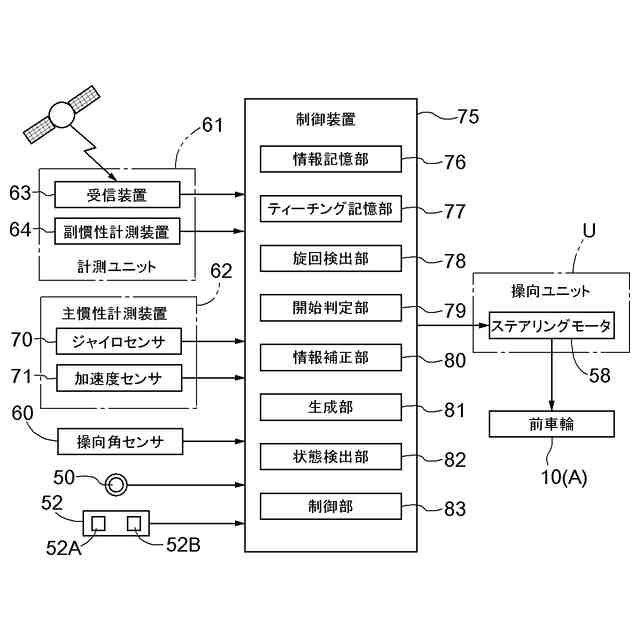
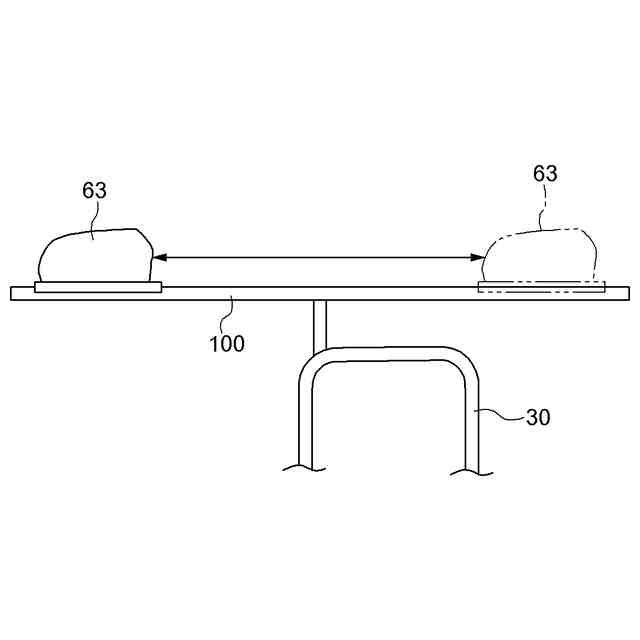
【解決手段】走行装置を操向可能な操向ユニットと、衛星測位システムにより位置情報を取得する受信装置63が備えられる。受信装置63を走行機体Cに支持する支持フレーム31が備えられる。受信装置63は、ハーネス66が接続されるコネクタ部67を有し、受信装置63が支持フレーム31に支持された状態において、コネクタ部67が、受信装置63における前面部以外の部分に設けられている。
【選択図】図3
特許請求の範囲
【請求項1】
走行装置を有する走行機体と、
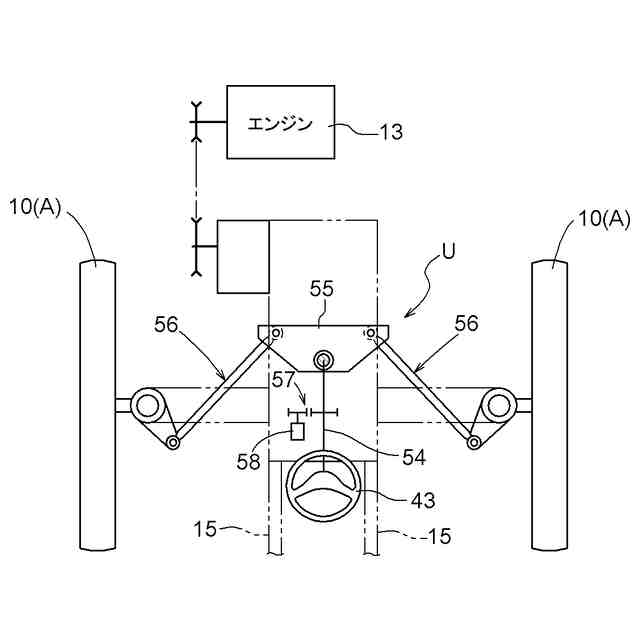
前記走行装置を操向可能な操向ユニットと、
衛星測位システムにより位置情報を取得する受信装置と、
前記受信装置を前記走行機体に支持する支持フレームとを備え、
前記受信装置は、ハーネスが接続されるコネクタ部を有し、
前記受信装置が前記支持フレームに支持された状態において、前記コネクタ部が、前記受信装置における前面部以外の部分に設けられている作業車。
続きを表示(約 400 文字)
【請求項2】
前記コネクタ部が、前記受信装置における後面部に設けられている請求項1に記載の作業車。
【請求項3】
前記ハーネスが、前記支持フレームに沿って延びている請求項1または2に記載の作業車。
【請求項4】
前記コネクタ部をガードするガード部を備える請求項1から3のいずれか1項に記載の作業車。
【請求項5】
前記支持フレームに板状部材が支持され、前記板状部材に前記受信装置が支持されている請求項1から4のいずれか1項に記載の作業車。
【請求項6】
前記走行装置が前輪及び後輪を有し、
前記受信装置の前端部が前記前輪の前端部よりも前方に位置する請求項1から5のいずれか1項に記載の作業車。
【請求項7】
前記受信装置の前端部が前記走行機体の前端部よりも後方に位置する1から6のいずれか1項に記載の作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行機体の自動操向制御が可能な作業車に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来の作業車が、例えば、下記特許文献1に記載されている。この作業車には、走行装置(特許文献1では「前車輪」「後車輪」)を有する走行機体と、圃場に対する作業を行う作業装置(特許文献1では「苗植付作業装置」)と、走行装置を操向可能な操向ユニット(特許文献1では「パワステバルブ」「パワステシリンダ」「自動制御弁」等)と、が備えられている。さらに、この作業車には、衛星測位システムにより位置情報を取得する受信装置(特許文献1では「GPS受信機」)と、取得される位置情報に基づいて走行機体が直進走行するように、操向ユニットを制御する制御部(特許文献1では「コントローラ」)と、が備えられている。この作業車は、受信装置で取得される位置情報のみに基づいて操向ユニットを制御し、走行機体の自動操向制御を行うようになっている。
【0003】
また、下記特許文献2には、衛星測位システムにより位置情報を取得する受信装置と慣性情報を計測する慣性計測装置とが一体となった計測ユニットが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2001-161112号公報
米国特許第7346452号明細書(Fig.1)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、衛星測位システムにより受信装置から取得される位置情報は、実際の位置とのズレが大きくなる場合もあり、そのような場合、上記特許文献1に記載の作業車では、走行機体の自動操向制御を用いて作業装置による作業を正確に行うことが難しくなっていた。
【0006】
また、電波障害等が生じやすい状況下では、受信装置により取得される位置情報の情報量が不十分となり、走行機体の自動操向制御を行うこと自体が難しくなっていた。
【0007】
このため、上記特許文献1に記載の作業車に、上記特許文献2に記載のように、衛星測位システムにより位置情報を取得する受信装置と慣性情報を計測する慣性計測装置とが一体となった計測ユニットを搭載し、受信装置により取得される位置情報と、慣性計測装置により計測される慣性情報と、に基づいて、走行機体の自動操向制御を行い、作業装置による作業の正確性をより向上させることが検討された。
【0008】
本発明の目的は、走行機体の自動操向制御を用いて作業装置による作業を正確に行うことが可能となる作業車を提供することにある。
【課題を解決するための手段】
【0009】
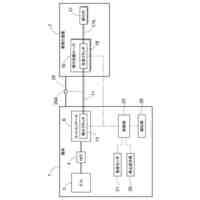
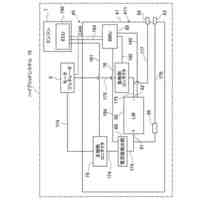
本発明の作業車は、走行装置を有する走行機体と、前記走行装置を操向可能な操向ユニットと、衛星測位システムにより位置情報を取得する受信装置と、慣性計測装置と、前記受信装置からの情報及び前記慣性計測装置からの情報に基づいて前記前記操向ユニットを制御する制御部と、が備えられ、前記走行機体の前部に設けられたボンネットが備えられ、前記ボンネットの上方を延びるフレームが備えられ、前記受信装置と前記慣性計測装置と、が前記走行機体における同じ箇所である前記フレームに支持されている。
また、本発明の作業車は、走行装置を有する走行機体と、前記走行装置を操向可能な操向ユニットと、衛星測位システムにより位置情報を取得する受信装置と、前記走行機体の傾きを検出する副慣性計測装置と、前記位置情報に基づいて、前記操向ユニットを制御する制御部と、が備えられ、前記受信装置と前記副慣性計測装置と、が前記走行機体における同じ箇所に配置されている。
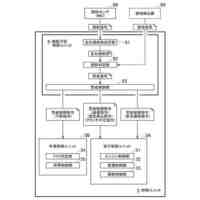
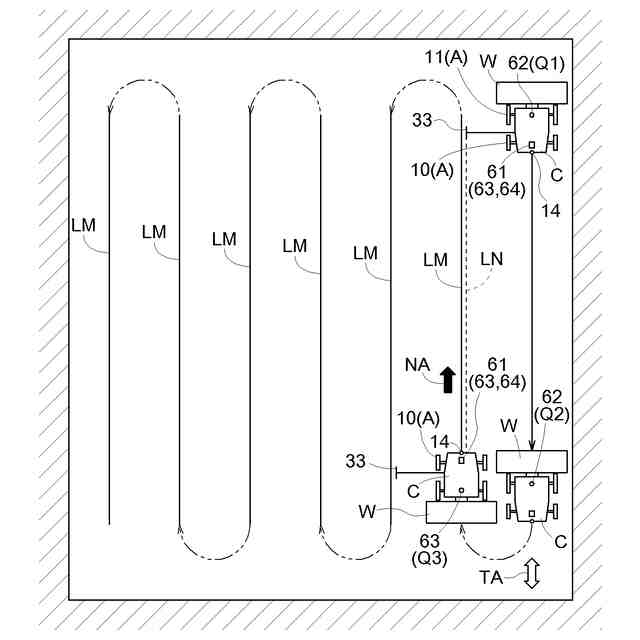
また、本発明の作業車は、走行装置を有する走行機体と、圃場に対する作業を行う作業装置と、前記走行装置を操向可能な操向ユニットと、衛星測位システムにより位置情報を取得する受信装置と、慣性情報を計測する慣性計測装置と、前記走行機体を走行させる目標ラインを生成する生成部と、前記位置情報、及び、前記慣性情報に基づいて、前記走行機体が前記目標ラインに沿って走行するように、前記操向ユニットを制御する制御部と、が備えられ、前記受信装置と、前記慣性計測装置と、が前記走行機体における異なる箇所に配置されているものである。
【0010】
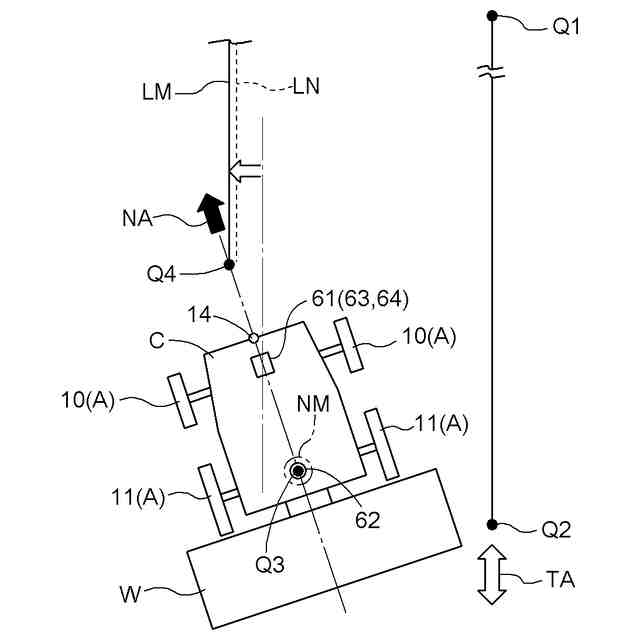
本発明によると、衛星測位システムにより位置情報を取得する受信装置と、慣性情報を計測する慣性計測装置と、が走行機体における異なる箇所に配置されている。
このため、例えば、受信装置を揺れが比較的大きくなる箇所に配置して、受信装置の位置情報の取得精度を向上できるとともに、慣性計測装置を揺れが比較的小さくなる箇所に配置して、慣性計測装置により計測される慣性情報の誤差を少なくできる。つまり、受信装置により取得される位置情報の精度と慣性計測装置により計測される慣性情報の精度との両方が向上し、受信装置と慣性計測装置との特性が両方とも生かすことが可能になる。
これにより、高精度の位置情報及び慣性情報を用いて操向ユニットの操向制御を行うことが可能になり、走行機体及び作業装置が目標ラインに沿って走行するように走行機体を正確に自動操向制御できるものとなる。
したがって、本発明によれば、走行機体の自動操向制御を用いて作業装置による作業を正確に行うことが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
桝蓋
19日前
株式会社クボタ
作業車
1か月前
株式会社クボタケミックス
多層管
5日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
収穫機
19日前
株式会社クボタ
収穫機
19日前
株式会社クボタ
収穫機
19日前
株式会社クボタ
収穫機
19日前
株式会社クボタ
作業車
5日前
株式会社クボタ
収穫機
2か月前
株式会社クボタケミックス
取付部材
13日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
コンバイン
2か月前
株式会社クボタ
圃場作業機
19日前
株式会社クボタ
コンバイン
2か月前
株式会社クボタ
発電シート
1か月前
株式会社クボタ
水田作業車
12日前
株式会社クボタ
水田作業車
12日前
株式会社クボタ
コンバイン
2か月前
株式会社クボタ
膜分離装置
6日前
株式会社クボタ
浄水システム
1か月前
株式会社クボタ
歩行型作業機
1か月前
株式会社クボタ
歩行型作業機
1か月前
株式会社クボタ
気密試験装置
1か月前
株式会社クボタ
バッテリパック
1か月前
株式会社クボタ
水分量測定装置
25日前
株式会社クボタ
水分量測定装置
25日前
株式会社クボタ
バッテリパック
1か月前
株式会社クボタケミックス
更生管案内装置
1か月前
株式会社クボタ
農業用支柱引抜機
2か月前
株式会社クボタ
弁箱用の消失模型
14日前
株式会社クボタ
農業用支柱挿入機
2か月前
株式会社クボタ
遠心脱水機の運転方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ