TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024113404
公報種別
公開特許公報(A)
公開日
2024-08-22
出願番号
2023018360
出願日
2023-02-09
発明の名称
制御装置、制御方法、及び制御プログラム
出願人
株式会社国際電気通信基礎技術研究所
,
国立大学法人電気通信大学
代理人
弁理士法人秀和特許事務所
主分類
F15B
15/14 20060101AFI20240815BHJP(流体圧アクチュエータ;水力学または空気力学一般)
要約
【課題】流体圧アクチュエータを精度よく制御する。
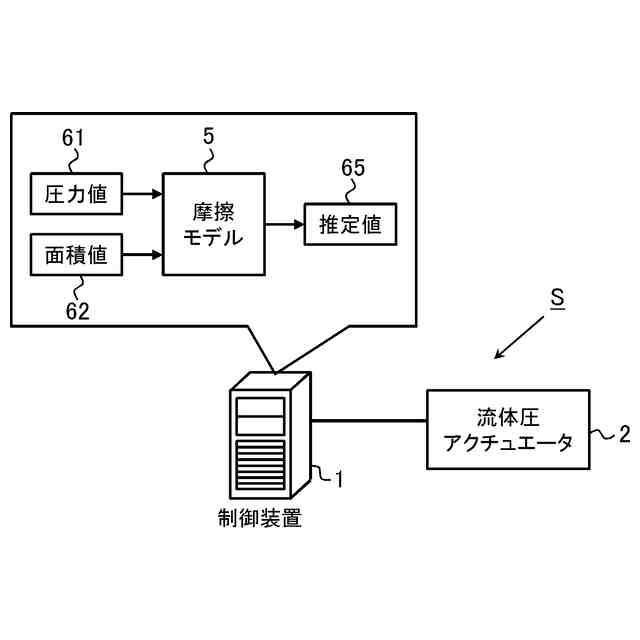
【解決手段】本開示に係る制御装置は、流体を収容する内部空間を構成する収容体
収容体の内部空間に接するように配置される可動部、封止材を備える流体圧アクチュエータに接続される。可動部は、変形要素を含む封止材を備える。封止材は、収容体の内壁と可動部との間の隙間を封止するように配置される。制御装置は、内部空間に収容された流体の圧力の値を取得し、摩擦モデルを使用して、内壁に対する封止材の接触面積の値及び取得された圧力の値から可動部に生じる摩擦力の推定値を算出し、算出された摩擦力の推定値を反映しながら流体圧アクチュエータの可動部の駆動力を制御するように構成される。
【選択図】図1
特許請求の範囲
【請求項1】
流体を収容する内部空間を構成する収容体、前記収容体の前記内部空間に接するように配置される可動部、及び封止材を備える流体圧アクチュエータであって、前記封止材は、変形要素を含むように形成され、かつ前記内部空間を密封するために前記収容体の内壁と前記可動部との間の隙間を封止するように配置される、流体圧アクチュエータに接続される制御装置であって、
前記内部空間に収容された前記流体の圧力の値を取得するように構成される情報取得部と、
摩擦モデルを使用して、前記内壁に対する前記封止材の接触面積の値及び取得された前記圧力の値から前記可動部に生じる摩擦力の推定値を算出するように構成される摩擦推定部であって、前記摩擦モデルは、前記封止材の接触面積及び前記流体の圧力から前記摩擦力を推定するように構成される、摩擦推定部と、
算出された前記摩擦力の推定値を反映しながら前記流体圧アクチュエータの前記可動部の駆動力を制御するように構成される動作制御部と、
を備える、
制御装置。
続きを表示(約 1,500 文字)
【請求項2】
前記摩擦推定部において使用される前記摩擦モデルは、前記封止材及び前記収容体の接触の属性に応じて選択された摩擦モデルである、
請求項1に記載の制御装置。
【請求項3】
前記流体圧アクチュエータは、電磁力による駆動力を前記可動部に更に与えるように構成される補助駆動部を更に備える、
請求項1に記載の制御装置。
【請求項4】
前記摩擦力の推定値を反映することは、算出された前記推定値に応じて前記可動部に生じる前記摩擦力を補償することにより構成され、
前記可動部に生じる前記摩擦力を補償することは、前記補助駆動部から与えられる前記電磁力によって前記摩擦力を補償することにより構成される、
請求項3に記載の制御装置。
【請求項5】
前記摩擦力の推定値を反映することは、算出された前記推定値に応じて前記可動部に生じる前記摩擦力を増幅することにより構成され、
前記摩擦力を増幅することは、前記可動部に生じる前記摩擦力と同じ方向に力を与えることにより構成され、
前記可動部に生じる前記摩擦力を増幅することは、前記補助駆動部から与えられる前記電磁力によって前記摩擦力を増幅することにより構成される、
請求項3に記載の制御装置。
【請求項6】
前記流体圧アクチュエータは、空電ハイブリッドアクチュエータである、
請求項3から5のいずれか1項に記載の制御装置。
【請求項7】
前記流体圧アクチュエータは、前記可動部を介して出力される力を測定する荷重センサを更に備え、
前記制御装置は、前記荷重センサにより得られる前記力の測定値から前記摩擦力の算出値を導出し、導出された前記摩擦力の算出値と前記摩擦モデルを使用して得られた前記摩擦力の推定値との間の乖離に応じて、前記流体圧アクチュエータに異常が生じたか否かを判定する異常判定部を更に備える、
請求項1に記載の制御装置。
【請求項8】
前記摩擦推定部は、取得された前記圧力の値から前記封止材の接触面積の値を算出するように更に構成され、
前記摩擦力の推定値を算出することは、算出された前記接触面積の値及び取得された前記圧力の値から前記摩擦力の推定値を算出することにより構成される、
請求項1に記載の制御装置。
【請求項9】
前記封止材は、ゴム、樹脂及びエラストマーの少なくともいずれかを用いて生成されていることで、前記変形要素を含むように形成されている、
請求項1に記載の制御装置。
【請求項10】
流体を収容する内部空間を構成する収容体、前記収容体の前記内部空間に接するように配置される可動部、及び封止材を備える流体圧アクチュエータであって、前記封止材は、変形要素を含むように形成され、かつ前記内部空間を密封するために前記収容体の内壁と前記可動部との間の隙間を封止するように配置される、流体圧アクチュエータに接続されるコンピュータが、
前記内部空間に収容された前記流体の圧力の値を取得するステップと、
摩擦モデルを使用して、前記内壁に対する前記封止材の接触面積の値及び取得された前記圧力の値から前記可動部に生じる摩擦力の推定値を算出するステップであって、前記摩擦モデルは、前記封止材の接触面積及び前記流体の圧力から前記摩擦力を推定するように構成される、ステップと、
算出された前記摩擦力の推定値を反映しながら前記流体圧アクチュエータの前記可動部の駆動力を制御するステップと、
を実行する、
制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御方法、及び制御プログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
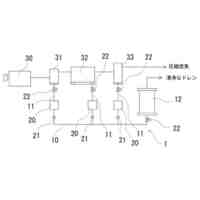
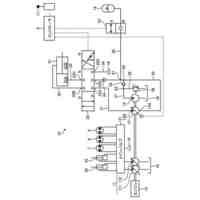
エアシリンダ等の流体圧アクチュエータは、アクチュエータのサイズに対して大きな力を取り出せることから、建設機械の駆動、工場のラインでの搬送等の場面で利用されている。流体圧アクチュエータは、収容体の内部空間に収容された流体の圧力によって可動部を駆動することで動作する。収容体は、例えば、シリンダチューブであり、可動部は、例えば、ピストンである。
【0003】
内部空間の流体が漏れてしまうと、可動部に作用する力が逃げてしまう。そのため、流体の漏れを抑制するように、収容体の内壁と可動部との間は封止される。封止を十分に行うため、可動部から収容体の内壁に対してある程度の与圧がかけられる。その結果、可動部の駆動に際して、摩擦が問題となる。摩擦の低減のため、例えば、摺動性の高い素材を封止に使用する、液体による潤滑を与える等の方策が採用されている。液体による潤滑では、可動部の摺動速度に応じて動摩擦力及び粘性が変化することが知られている(ストライベック曲線)。
【先行技術文献】
【非特許文献】
【0004】
C. Canudas de Wit, H. Olsson, K. Astrom, and P. Lischinsky, “A new model for control of systems with friction,” IEEE Trans. on Auto. Cont., vol. 40, no. 3, pp. 419-425, 1995.
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記ストライベック曲線を用いることで、可動部の摺動速度に応じて、封止に生じる摩擦力及び粘性を推定することができる。しかしながら、本件発明者らは、従来の方法には、次のような問題点があることを見出した。すなわち、従来の方法では、流体圧アクチュエータの可動部に生じる摩擦力の推定に誤差が生じる可能性がある。これに起因して、流体圧アクチュエータを精度よく制御することができない可能性がある。
【0006】
本発明は、一側面では、このような点を考慮してなされたものであり、その目的は、流体圧アクチュエータを精度よく制御するための技術を提供することである。
【課題を解決するための手段】
【0007】
本発明は、上述した課題を解決するために、以下の構成を採用する。なお、以下の発明の構成は適宜組み合わせ可能である。
【0008】
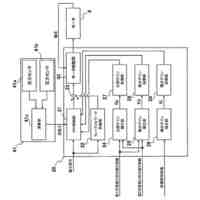
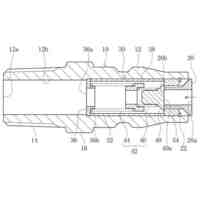
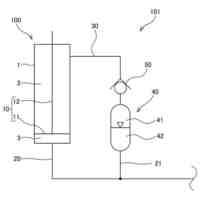
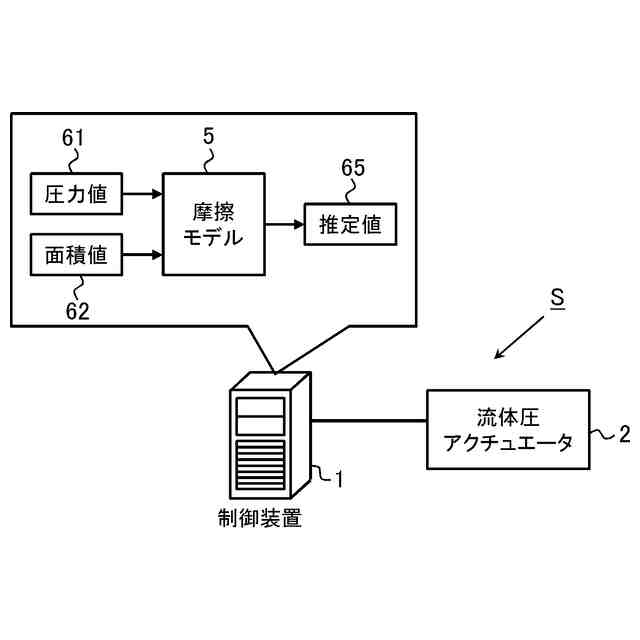
本発明の一側面に係る制御装置は、流体圧アクチュエータに接続される。流体圧アクチュエータは、流体を収容する内部空間を構成する収容体、収容体の内部空間に接するように配置される可動部、及び封止材を備える。封止材は、変形要素を含むように形成され、かつ内部空間を密封するために収容体の内壁と可動部との間の隙間を封止するように配置される。制御装置は、情報取得部、摩擦推定部、及び動作制御部を備えるように構成される。情報取得部は、内部空間に収容された流体の圧力の値を取得するように構成される。摩擦推定部は、摩擦モデルを使用して、内壁に対する封止材の接触面積の値及び取得された圧力の値から可動部に生じる摩擦力の推定値を算出するように構成される。摩擦モデル
は、封止材の接触面積及び流体の圧力から摩擦力を推定するように構成される。動作制御部は、算出された摩擦力の推定値を反映しながら流体圧アクチュエータの可動部の駆動力を制御するように構成される。
【0009】
本件発明者らは、変形要素を含むように形成される封止材について、収容体の内壁に対する封止材の接触面積及び流体の圧力に応じて、可動部に生じる摩擦力が変動し得ることを後述の実験例により見出した。この知見を活かして、当該構成では、摩擦モデルは、封止材の接触面積及び流体の圧力から摩擦力を推定するように構築される。制御装置は、当該摩擦モデルにより算出された摩擦力の推定値を反映しながら流体圧アクチュエータの可動部の駆動力を制御するように構成される。したがって、当該構成によれば、流体圧アクチュエータの精度のよい制御の遂行を期待することができる。
【0010】
上記一側面に係る制御装置において、前記摩擦推定部において使用される前記摩擦モデルは、前記封止材及び前記収容体の接触の属性に応じて選択された摩擦モデルであってよい。封止材を介して可動部に生じる摩擦力は、封止材及び収容体の接触の属性に応じて異なり得る。当該構成によれば、接触の属性に応じた摩擦モデルを使用することで、可動部に生じる摩擦力の推定精度の向上を期待することができる。その結果、流体圧アクチュエータの精度のよい制御の遂行を期待することができる。なお、接触の属性は、例えば、封止材の種類、収容体の種類、潤滑剤の有無、潤滑剤の種類、温度、可動部の速度等により規定されてよい。封止材及び収容体の種類は、例えば、形状、携帯、材料、材質等により規定されてよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
旭精工株式会社
ピストン構造
2か月前
カヤバ株式会社
シリンダ装置
5か月前
カヤバ株式会社
シリンダ装置
5か月前
カヤバ株式会社
シリンダ装置
5か月前
カヤバ株式会社
シリンダ装置
5か月前
株式会社コスメック
圧油給排システム
4か月前
株式会社フクハラ
ドレン排出構造
4か月前
株式会社コスメック
シリンダ装置
5か月前
日立建機株式会社
運搬車両
6か月前
ソネック株式会社
エア噴出機構
6か月前
個人
空圧式アクチュエータ
2か月前
藤倉コンポジット株式会社
シリンダ装置
1か月前
SMC株式会社
シリンダ装置
25日前
ヤンセン・サイエンシズ・アイルランド・アンリミテッド・カンパニー
GDF15融合タンパク質及びその使用
1か月前
ダイキン工業株式会社
油圧ユニット
5か月前
ダイキン工業株式会社
油圧ユニット
5か月前
デンカ株式会社
アクチュエータ
11日前
和光工業株式会社
シリンダ及び昇降装置
3か月前
川崎重工業株式会社
マルチコントロールバルブ
3か月前
学校法人 中央大学
移動装置
1か月前
カヤバ株式会社
流体圧機器
5か月前
株式会社ユキテック
流体式アクチュエータ
3か月前
住友重機械工業株式会社
駆動装置、駆動方法
1か月前
カヤバ株式会社
流体圧制御装置
2か月前
カヤバ株式会社
流体圧シリンダ
4か月前
コベルコ建機株式会社
ポンプ制御装置
6か月前
株式会社クボタ
作業機の油圧システム
7か月前
カヤバ株式会社
流体圧制御装置
5か月前
株式会社小松製作所
作業機械
3か月前
川崎重工業株式会社
液圧システム
2か月前
川崎重工業株式会社
液圧システム
2か月前
株式会社小松製作所
作業機械
1か月前
オークマ株式会社
油圧システム
4か月前
日立建機株式会社
フラッシング装置及び建設機械
5か月前
ナブテスコ株式会社
液圧モータユニット
3か月前
カヤバ株式会社
流体圧シリンダユニット
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ