TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024110913
公報種別
公開特許公報(A)
公開日
2024-08-16
出願番号
2023193758
出願日
2023-11-14
発明の名称
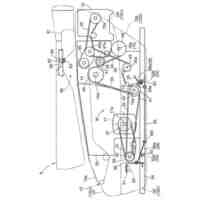
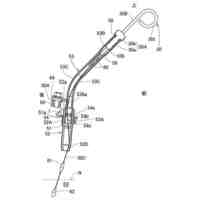
操作機構および歩行型作業機
出願人
株式会社クボタ
,
日本フレックス工業株式会社
代理人
弁理士法人R&C
主分類
G05G
7/10 20060101AFI20240808BHJP(制御;調整)
要約
【課題】操作入力部が操作された場合及び補助操作入力部が操作された場合の両方で、被操作装置を適切に操作する手段を実現する。
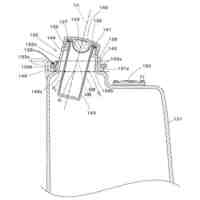
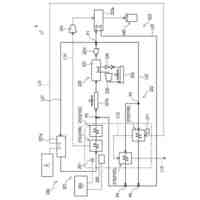
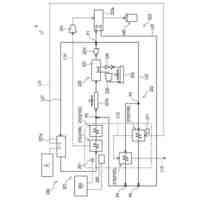
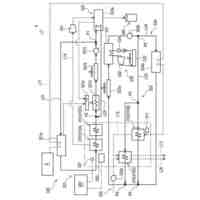
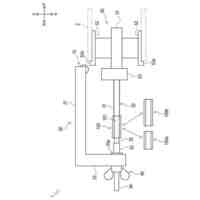
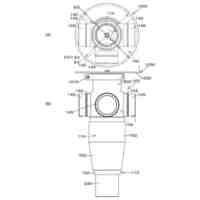
【解決手段】操作入力部が操作された場合及び補助操作入力部が操作された場合に被操作装置を操作する操作機構であって、第1端部31aに操作入力部が接続され第2端部31bに前記被操作装置が接続されるインナワイヤ31と、インナワイヤ31が挿通されるアウタワイヤ32と、アウタワイヤ32の一方の端部である固定端部32aを固定する固定部材34と、補助操作入力部が操作を受け付けたことに応じてアウタワイヤ32の他方の端部である移動端部32bをインナワイヤ31が延びる方向に沿って移動させる移動機構Eと、を備える。
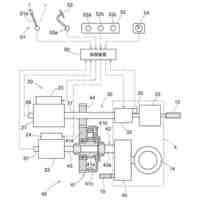
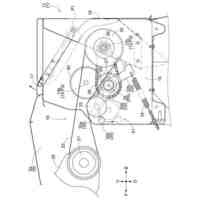
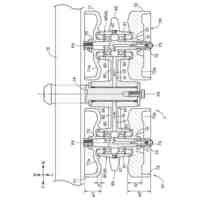
【選択図】図4
特許請求の範囲
【請求項1】
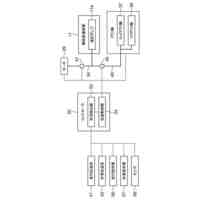
操作入力部(B)が操作された場合及び補助操作入力部(C)が操作された場合に被操作装置(D)を操作する操作機構(A)であって、
第1端部(31a)に前記操作入力部(B)が接続され第2端部(31b)に前記被操作装置(D)が接続されるインナワイヤ(31)と、
前記インナワイヤ(31)が挿通されるアウタワイヤ(32/33)と、
前記アウタワイヤ(32/33)の一方の端部である固定端部(32a/33a)を固定する固定部材(34/35)と、
前記補助操作入力部(C)が操作を受け付けたことに応じて前記アウタワイヤ(32/33)の他方の端部である移動端部(32b/33b)を前記インナワイヤ(31)が延びる方向に沿って移動させる移動機構(E)と、を備える操作機構(A)。
続きを表示(約 1,100 文字)
【請求項2】
前記移動機構(E)は、前記アウタワイヤ(32/33)の前記移動端部(32b/33b)の移動を規制すると共に前記補助操作入力部(C)が操作を受け付けたことに応じて前記移動端部(32b/33b)の移動の規制を解除する規制部材(85)を更に備える請求項1に記載の操作機構(A)。
【請求項3】
前記移動機構(E)は、前記アウタワイヤ(32/33)の前記移動端部(32b/33b)を前記インナワイヤ(31)が延びる方向に沿って付勢する付勢部材(82)を更に備える請求項2に記載の操作機構(A)。
【請求項4】
前記移動機構(E)は、前記補助操作入力部(C)が操作を受け付けたことに応じて前記アウタワイヤ(32/33)の前記移動端部(32b/33b)を前記インナワイヤ(31)が延びる方向のうち前記被操作装置(D)の位置する側へ移動させる請求項3に記載の操作機構(A)。
【請求項5】
前記固定端部(32a/33a)は、前記アウタワイヤ(32/33)の端部のうちの、前記被操作装置(D)の側の端部であり、
前記移動端部(32b/33b)は、前記アウタワイヤ(32/33)の端部のうちの、前記操作入力部(B)の側の端部である請求項4に記載の操作機構(A)。
【請求項6】
前記アウタワイヤ(32/33)の前記移動端部(32b/33b)と前記規制部材(85)とをスライド移動が可能な状態で内部に収容するハウジング(80)を更に備える請求項5に記載の操作機構(A)。
【請求項7】
前記補助操作入力部(C)と前記規制部材(85)とを接続する操作ワイヤ(50/60)を更に備える請求項6に記載の操作機構(A)。
【請求項8】
前記移動機構(E)により前記アウタワイヤ(32)の前記移動端部(32b)が移動したことを示す表示機構(F)を更に備える請求項1に記載の操作機構(A)。
【請求項9】
前記表示機構(F)は、前記アウタワイヤ(32)の表面に付された着色部(32e/32f)である請求項8に記載の操作機構(A)。
【請求項10】
前記アウタワイヤ(32)の前記移動端部(32b)をスライド移動が可能な状態で内部に収容するハウジング(80)を更に備え、
前記着色部(32e)は、前記移動機構(E)による前記移動端部(32b)の移動によって、前記ハウジング(80)の内部と外部との間で移動する請求項9に記載の操作機構(A)。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、操作機構および歩行型作業機に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、歩行型管理機が開示されている。この歩行型管理機では、PTOクラッチのシフトフォークが、操縦ハンドルのPTOクラッチレバーに、操作ワイヤを介して連動連結されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-8413号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の歩行型管理機において、PTOクラッチレバーとは別の操作入力部からの操作でPTOクラッチを入切できるようにする場合、その操作入力部とPTOクラッチとを操作ワイヤで接続することが考えられる。
【0005】
しかし、1つの被操作装置に複数の操作ワイヤを接続した場合、1つの操作ワイヤの動きを他の操作ワイヤが阻害して、被操作装置が適切に動作しないおそれがある。例えば、他の操作ワイヤの重みにより、被操作装置の操作部材が動かないおそれがある。
【0006】
本発明の目的は、操作入力部が操作された場合及び補助操作入力部が操作された場合の両方で、被操作装置を適切に操作する手段を実現することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決する手段として、本発明の操作機構は、操作入力部が操作された場合及び補助操作入力部が操作された場合に被操作装置を操作する操作機構であって、第1端部に前記操作入力部が接続され第2端部に前記被操作装置が接続されるインナワイヤと、前記インナワイヤが挿通されるアウタワイヤと、前記アウタワイヤの一方の端部である固定端部を固定する固定部材と、前記補助操作入力部が操作を受け付けたことに応じて前記アウタワイヤの他方の端部である移動端部を前記インナワイヤが延びる方向に沿って移動させる移動機構と、を備えることを特徴とする。
【0008】
操作入力部が操作を受け付けた場合、インナワイヤにより操作が伝達され、被操作装置が操作される。補助操作入力部が操作を受け付けた場合、移動機構によりアウタワイヤの移動端部がインナワイヤが延びる方向に沿って移動する。その移動によりインナワイヤの第2端部が動くので、被操作装置が操作される。そして被操作装置への操作の伝達は、操作入力部が操作された場合であっても、補助操作入力部が操作された場合であっても、同一のインナワイヤによって実現されることになる。従って上記の特徴によれば、操作入力部が操作された場合及び補助操作入力部が操作された場合の両方で、被操作装置が適切に操作される。
【0009】
本発明において、前記移動機構は、前記アウタワイヤの前記移動端部の移動を規制すると共に前記補助操作入力部が操作を受け付けたことに応じて前記移動端部の移動の規制を解除する規制部材を更に備えると好ましい。
【0010】
上記の特徴によれば、規制部材によりアウタワイヤの移動が規制及び解除されるので、移動機構によるアウタワイヤの移動端部の移動が適切に実現される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
11日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業機
11日前
株式会社クボタ
作業機
11日前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業機
11日前
株式会社クボタケミックス
弁装置
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
作業車両
8日前
株式会社クボタ
コンバイン
11日前
株式会社クボタ
コンバイン
11日前
株式会社クボタ
電動作業車
5日前
株式会社クボタ
電動作業車
11日前
株式会社クボタ
吸気マニホルド
11日前
株式会社クボタ
クローラ走行装置
8日前
株式会社クボタ
エンジンの検油装置
11日前
株式会社クボタ
排気ガス浄化システム
4日前
株式会社クボタ
排気ガス浄化システム
4日前
株式会社クボタ
排気ガス浄化システム
4日前
株式会社クボタ
排気ガス浄化システム
4日前
株式会社クボタ
排気ガス浄化システム
4日前
株式会社クボタケミックス
多層管及びその製造方法
8日前
株式会社クボタ
吸気マニホルドの支持構造
11日前
株式会社クボタ
吸気マニホルドの支持構造
11日前
株式会社クボタ
水処理設備および水処理方法
4日前
株式会社クボタケミックス
切削工具、切削方法及び施工方法
4日前
丸栄工業株式会社
排水集合管の保護カバー
8日前
株式会社クボタ
情報処理方法、プログラム、及び情報処理装置
11日前
株式会社クボタ
シートロック構造及びシートロック構造を備えた作業機
11日前
株式会社クボタ
作業車両に接続された作業機を推定する方法およびシステム
11日前
株式会社クボタ
制御システム、作業車両、制御方法およびコンピュータプログラム
11日前
続きを見る
他の特許を見る











 特許ウォッチ
特許ウォッチ