TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024107945
公報種別
公開特許公報(A)
公開日
2024-08-09
出願番号
2023012155
出願日
2023-01-30
発明の名称
磁気ディスク装置、制御方法およびプログラム
出願人
株式会社東芝
代理人
弁理士法人酒井国際特許事務所
主分類
G11B
5/596 20060101AFI20240802BHJP(情報記憶)
要約
【課題】シーク制御の高速化およびセトリングの高精度化を実現する。
【解決手段】磁気ディスク装置は、磁気ディスクと、アームと、アームの先端に設けられる支持部材と、支持部材に設けられ、磁気ディスクにアクセスする磁気ヘッドと、アームを回転させる第1アクチュエータと、支持部材を駆動する第2アクチュエータと、磁気ヘッドのシーク制御を行う制御部と、を備える。制御部は、フィードバック制御部と繰り返し学習制御部を備える。フィードバック制御部は、磁気ヘッドの位置と目標位置との誤差を小さくするように、第1アクチュエータを駆動するための第1指令値を制御する。繰り返し学習制御部は、誤差に基づく入力値を入力し、繰り返し学習により第2アクチュエータを駆動するための第2指令値を出力する。
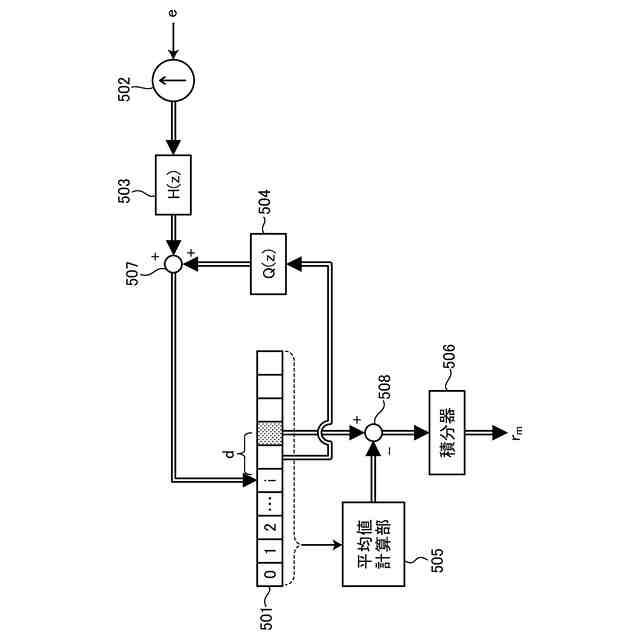
【選択図】図5
特許請求の範囲
【請求項1】
磁気ディスクと、
アームと、
前記アームの先端に設けられる支持部材と、
前記支持部材に設けられ、前記磁気ディスクにアクセスする磁気ヘッドと、
前記アームを回転させる第1アクチュエータと、
前記支持部材を駆動する第2アクチュエータと、
前記磁気ヘッドのシーク制御を行う制御部と、
を備え、
前記制御部は、
前記磁気ヘッドの位置と、目標位置と、の誤差を小さくするように、前記第1アクチュエータを駆動するための第1指令値を制御するフィードバック制御部と、
前記誤差に基づく入力値を入力し、繰り返し学習により前記第2アクチュエータを駆動するための第2指令値を出力する繰り返し学習制御部と、
を備える、
磁気ディスク装置。
続きを表示(約 1,400 文字)
【請求項2】
前記繰り返し学習制御部は、
入力された前記入力値に対するフィルタであって、前記フィードバック制御部の閉ループ特性の逆特性を近似するマルチレート位相遅れフィルタである学習フィルタと、
前記シーク制御の複数のサンプリング時間で前記学習フィルタから出力される複数の学習データを記憶するメモリと、
前記メモリに記憶された複数の前記学習データに基づく値を積分して前記第2指令値を出力する積分器と、
を備える、
請求項1に記載の磁気ディスク装置。
【請求項3】
前記繰り返し学習制御部は、複数の前記学習データの平均値を計算する平均値計算部、を備え、
前記積分器は、複数の前記学習データのうち1つから、j回目(jは1以上の整数)の前記シーク制御での前記繰り返し学習で計算された前記平均値を減算した値を積分して、(j+1)回目の前記シーク制御の前記第2指令値を出力する、
請求項2に記載の磁気ディスク装置。
【請求項4】
前記フィードバック制御部は、
前記磁気ヘッドの位置を状態として推定し、前記磁気ヘッドの位置の推定値を出力するオブザーバを備え、
前記入力値は、前記誤差から前記第2アクチュエータの移動量に相当する値を減算した減算値と、前記推定値と、の差分である、
請求項1に記載の磁気ディスク装置。
【請求項5】
前記支持部材は、スライダおよびサスペンションのうち一方または両方である、
請求項1に記載の磁気ディスク装置。
【請求項6】
磁気ディスク装置により実行される制御方法であって、
前記磁気ディスク装置は、
磁気ディスクと、
アームと、
前記アームの先端に設けられる支持部材と、
前記支持部材に設けられ、前記磁気ディスクにアクセスする磁気ヘッドと、
前記アームを回転させる第1アクチュエータと、
前記支持部材を駆動する第2アクチュエータと、
前記磁気ヘッドのシーク制御を行う制御部と、
前記制御部が、
前記磁気ヘッドの位置と、目標位置と、の誤差を小さくするように、前記第1アクチュエータを駆動するための第1指令値を制御するフィードバック制御ステップと、
前記誤差に基づく入力値を入力し、繰り返し学習により前記第2アクチュエータを駆動するための第2指令値を出力する繰り返し学習制御ステップと、
を含む制御方法。
【請求項7】
磁気ディスク装置が備えるコンピュータに実行させるためのプログラムであって、
前記磁気ディスク装置は、
磁気ディスクと、
アームと、
前記アームの先端に設けられる支持部材と、
前記支持部材に設けられ、前記磁気ディスクにアクセスする磁気ヘッドと、
前記アームを回転させる第1アクチュエータと、
前記支持部材を駆動する第2アクチュエータと、
を備え、
前記コンピュータに、
前記磁気ヘッドの位置と、目標位置と、の誤差を小さくするように、前記第1アクチュエータを駆動するための第1指令値を制御するフィードバック制御ステップと、
前記誤差に基づく入力値を入力し、繰り返し学習により前記第2アクチュエータを駆動するための第2指令値を出力する繰り返し学習制御ステップと、
を実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、磁気ディスク装置、制御方法およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
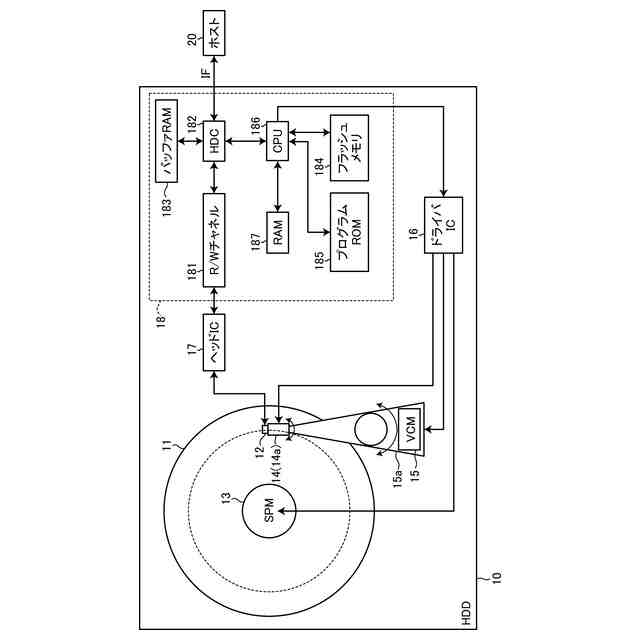
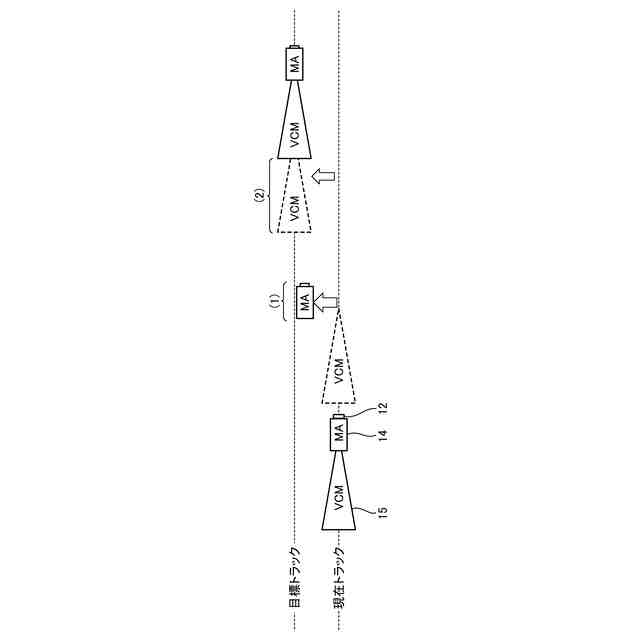
磁気ディスク装置では、例えば、ボイスコイルモータ(VCM)およびマイクロアクチュエータ(MA)の2段アクチュエータにより、データを読み書きする磁気ヘッドを目標トラックに位置決めする制御(シーク制御)が行われる。シーケンシャルリードライト(R/W)の性能向上には、1トラックずつ磁気ヘッドを移動していく、隣接トラックシークの高速化が必要である。さらに、近年の狭トラックピッチ化に対応するため、シークセトリング時の位置決めの高精度化も求められている。
【0003】
高速化に対しては、MAの先行動作を用いた手法が提案されている。また、セトリング改善に対しては繰り返し学習制御を用いた手法が提案されている。従来の繰り返し学習制御を用いたシーク制御では、VCMの制御入力および目標軌道をシークごとに更新することが一般的である。
【先行技術文献】
【特許文献】
【0004】
米国特許第7,626,782号公報
【非特許文献】
【0005】
J. Ishikawa, et al, “A Robust Stability Analysis on Learning Control for Hard Disk Drives”, Advances in Information Storage Systems, pp.49-61 (1999)
M. Kobayashi, R. Horowitz, “Track Seek Control for Hard Disk Dual-Stage Servo Systems”, IEEE Trans. on Magnetics, Vol.37, No.2, (2001)
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、シーク制御の高速化およびセトリングの高精度化を実現できる磁気ディスク装置、制御方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
実施形態の磁気ディスク装置は、磁気ディスクと、アームと、アームの先端に設けられる支持部材と、支持部材に設けられ、磁気ディスクにアクセスする磁気ヘッドと、アームを回転させる第1アクチュエータと、支持部材を駆動する第2アクチュエータと、磁気ヘッドのシーク制御を行う制御部と、を備える。制御部は、フィードバック制御部と繰り返し学習制御部を備える。フィードバック制御部は、磁気ヘッドの位置と目標位置との誤差を小さくするように、第1アクチュエータを駆動するための第1指令値を制御する。繰り返し学習制御部は、誤差に基づく入力値を入力し、繰り返し学習により第2アクチュエータを駆動するための第2指令値を出力する。
【図面の簡単な説明】
【0008】
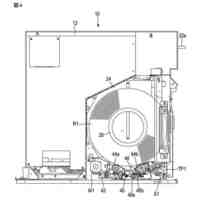
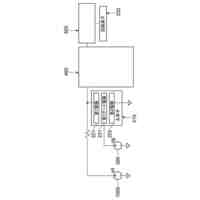
実施形態の磁気ディスク装置のブロック図。
シーク制御部のブロック図。
シーク制御中の動作とシーク目標軌道との関係を示す模式図。
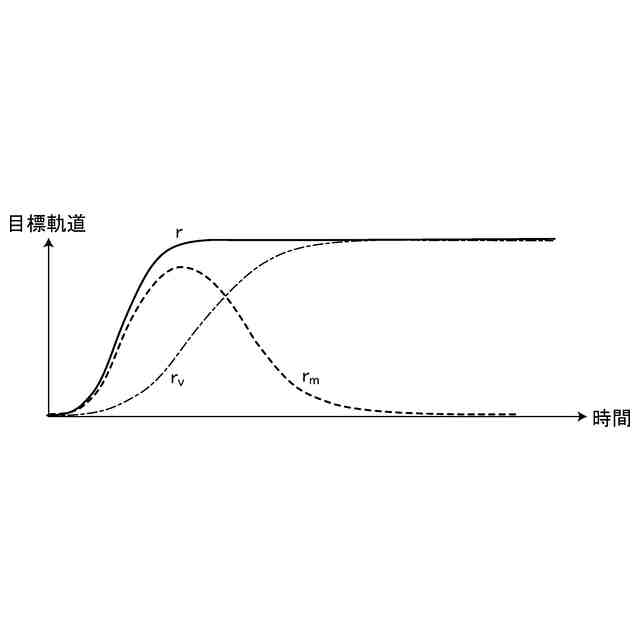
シーク制御における各信号の時間変化の例を示す図。
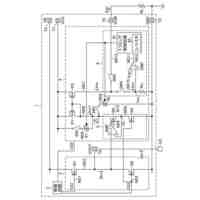
実施形態のシーク制御部のブロック図。
繰り返し学習制御器の内部構造を示す図。
周波数特性を模式的に示す図。
シーク制御処理のフローチャート。
アクチュエータの伝達特性を模擬するモデルの周波数応答の例を示す図。
隣接トラックシークをシミュレーションした結果の例を示す図。
隣接トラックシークをシミュレーションした結果の例を示す図。
【発明を実施するための形態】
【0009】
以下に添付図面を参照して、この発明にかかる磁気ディスク装置の好適な実施形態を詳細に説明する。
【0010】
本実施形態では、ヘッドの位置決めのための2段以上のアクチュエータを有する磁気ディスク装置において、高速かつ高精度な隣接トラックシーク制御方法を提供する。例えば、本実施形態では、隣接トラックシークにおいてはMAの先行動作に係る制御入力に対して繰り返し学習制御が適用される。これにより、高速化とセトリングの高精度化とを両立する制御手法が実現される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
発券機
1か月前
株式会社東芝
センサ
1か月前
株式会社東芝
受光装置
24日前
株式会社東芝
回転電機
2日前
株式会社東芝
電解装置
25日前
株式会社東芝
回転電機
24日前
株式会社東芝
測距装置
29日前
株式会社東芝
回転電機
2日前
株式会社東芝
回転電機
24日前
株式会社東芝
発振回路
22日前
株式会社東芝
回転電機
24日前
株式会社東芝
計算装置
1か月前
株式会社東芝
計算装置
1か月前
株式会社東芝
回転電機
2日前
株式会社東芝
回転電機
1か月前
株式会社東芝
試験装置
1か月前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
18日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
23日前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
25日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ