TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024100142
公報種別
公開特許公報(A)
公開日
2024-07-26
出願番号
2023003912
出願日
2023-01-13
発明の名称
自律移動体制御システム及び自律移動体制御方法
出願人
清水建設株式会社
代理人
個人
,
個人
,
個人
主分類
E05F
15/73 20150101AFI20240719BHJP(錠;鍵;窓または戸の付属品;金庫)
要約
【課題】高度な画像処理を行うことができない自律移動体であっても、適切に自動ドアの開閉を行うことができるようにする。
【解決手段】自動ドアが備えられる建物内での自律移動体の現在位置情報を取得する位置取得部と、前記現在位置情報に基づいて、前記自律移動体が前記自動ドアに対して所定位置・範囲内に位置した進入準備状況であるか否かを判定する状況判定部と、前記進入準備状況と判定したとき、人の通過を可能とする人対応モードから前記自律移動体の通過を可能とする移動体対応モードに前記自動ドアの動作モードを切り替えるモード切替制御部とを備えて自律移動体制御システムを構成する。
【選択図】図7
特許請求の範囲
【請求項1】
自動ドアが備えられる建物内での自律移動体の現在位置情報を取得する位置取得部と、
前記現在位置情報に基づいて、前記自律移動体が前記自動ドアに対して所定位置・範囲内に位置した進入準備状況であるか否かを判定する状況判定部と、
前記進入準備状況と判定したとき、人の通過を可能とする人対応モードから前記自律移動体の通過を可能とする移動体対応モードに前記自動ドアの動作モードを切り替えるモード切替制御部と
を備える自律移動体制御システム。
続きを表示(約 710 文字)
【請求項2】
前記人対応モードは、センサが前記自動ドアから所定の範囲内における物体の位置変化を検出した場合に前記自動ドアを開くモードである
請求項1に記載の自律移動体制御システム。
【請求項3】
前記人対応モードは、入力された認証用情報に基づいて認証装置が認証を行い、認証が成立した場合に、前記自動ドアを開くモードである
請求項1または2に記載の自律移動体制御システム。
【請求項4】
前記移動体対応モードは、前記自律移動体の移動を制御する移動制御部からの指示に応じて、自動ドアを開くモードである
請求項1または2に記載の自律移動体制御システム。
【請求項5】
前記移動制御部は、前記進入準備状況となって停止している前記自律移動体に対し、前記自動ドアが開かれ、全開又は少なくとも一定以上の開口度合いとなったことを示す通知を受信した後、前記自律移動体に移動を再開させる移動再開指示を送信する
請求項4に記載の自律移動体制御システム。
【請求項6】
自動ドアが備えられる建物内での自律移動体の現在位置情報を取得する位置取得ステップと、
前記現在位置情報に基づいて、前記自律移動体が前記自動ドアに対して所定位置・範囲内に位置した進入準備状況であるか否かを判定する状況判定ステップと、
前記進入準備状況と判定したとき、人の通過を可能とする人対応モードから前記自律移動体の移動を可能する移動体対応モードに前記自動ドアの動作モードを切り替えるモード切替制御ステップと、
を含む自律移動体制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動体制御システム及び自律移動体制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
セキュリティを確保しながら、施錠されたドアの解錠を行ってロボットを通過させることができるシステムが望まれている。このようなシステムとして、ロボットが撮影した画像から特定したドアの解錠の要求を入退室制御装置に対して行うシステムが提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2021-107108号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のシステムでは、撮像画像からドア(自動ドア)を識別可能とすべくドア識別子を設けておく必要がある上、ドアの開閉を画像処理結果から判断し、ドア解錠の可否を判断するものであり、高度な画像処理を行うことが可能なロボット(自律移動体)を用いなくてはならなかった。
【0005】
本発明は、上記した課題を考慮して、高度な画像処理を行うことができない自律移動体であっても、適切に自動ドアの開閉を行うことができるようにすることを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決する本発明の一態様は、自動ドアが備えられる建物内での自律移動体の現在位置情報を取得する位置取得部と、前記現在位置情報に基づいて、前記自律移動体が前記自動ドアに対して所定位置・範囲内に位置した進入準備状況であるか否かを判定する状況判定部と、前記進入準備状況と判定したとき、人の通過を可能とする人対応モードから前記自律移動体の通過を可能とする移動体対応モードに前記自動ドアの動作モードを切り替えるモード切替制御部とを備える自律移動体制御システムである。
【0007】
本発明の一態様は、自動ドアが備えられる建物内での自律移動体の現在位置情報を取得する位置取得ステップと、前記現在位置情報に基づいて、前記自律移動体が前記自動ドアに対して所定位置・範囲内に位置した進入準備状況であるか否かを判定する状況判定ステップと、前記進入準備状況と判定したとき、人の通過を可能とする人対応モードから前記自律移動体の移動を可能する移動体対応モードに前記自動ドアの動作モードを切り替えるモード切替制御ステップとを含む自律移動体制御方法である。
【発明の効果】
【0008】
本発明によれば、高度な画像処理を行うことができない自律移動体であっても、適切に自動ドアの開閉を行うことができる。
【図面の簡単な説明】
【0009】
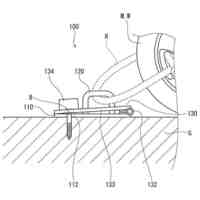
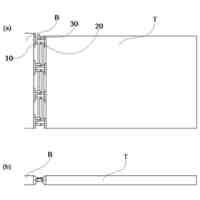
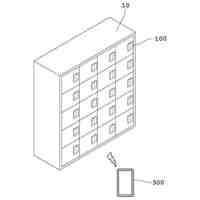
本実施形態に係る自動ドアが設けられる環境の一例を示す図である。
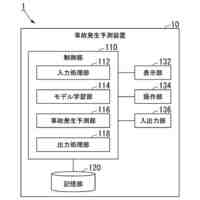
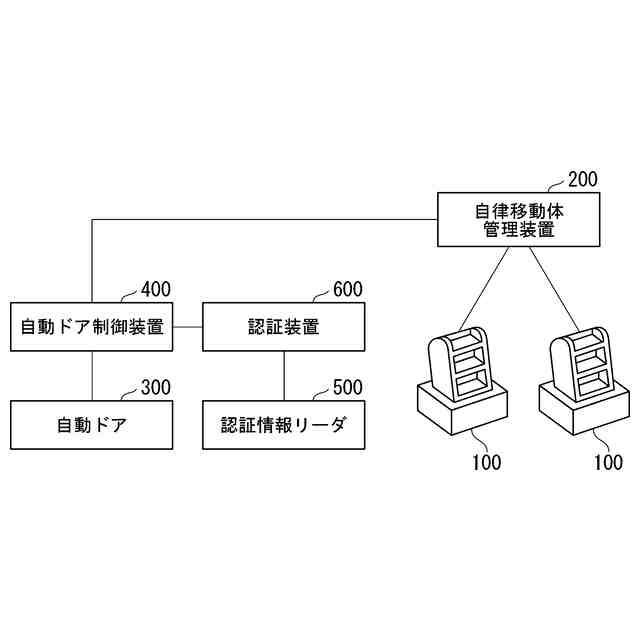
本実施形態に係る自律移動体制御システムの構成例を示す図である。
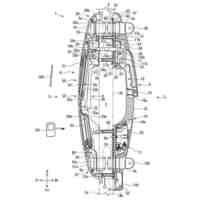
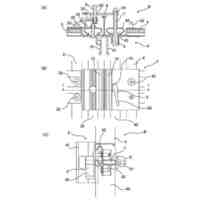
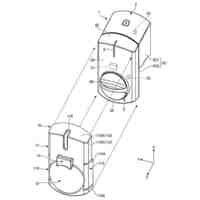
本実施形態に係る自律移動体の構成例を示す図である。
本実施形態に係る自律移動体管理装置の構成例を示す図である。
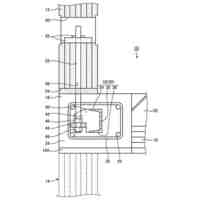
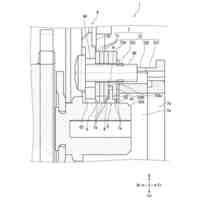
本実施形態に係る自動ドアの構成例を示す図である。
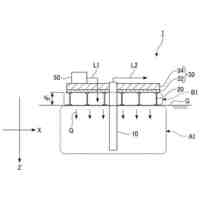
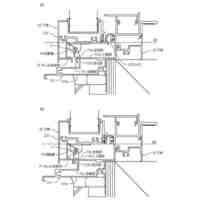
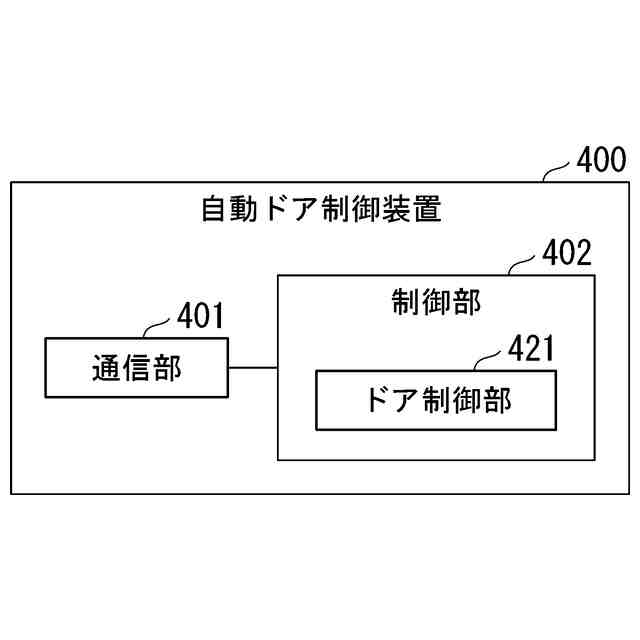
本実施形態に係る自動ドア制御装置の構成例を示す図である。
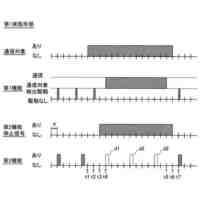
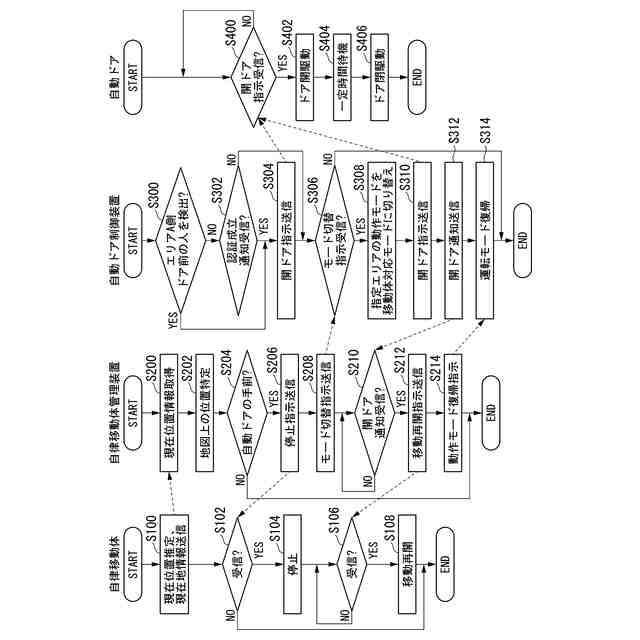
本実施形態に係る自律移動体制御システムが動作モードに応じた自動ドアの制御に関連して実行する処理手順例を示すフローチャートである。
【発明を実施するための形態】
【0010】
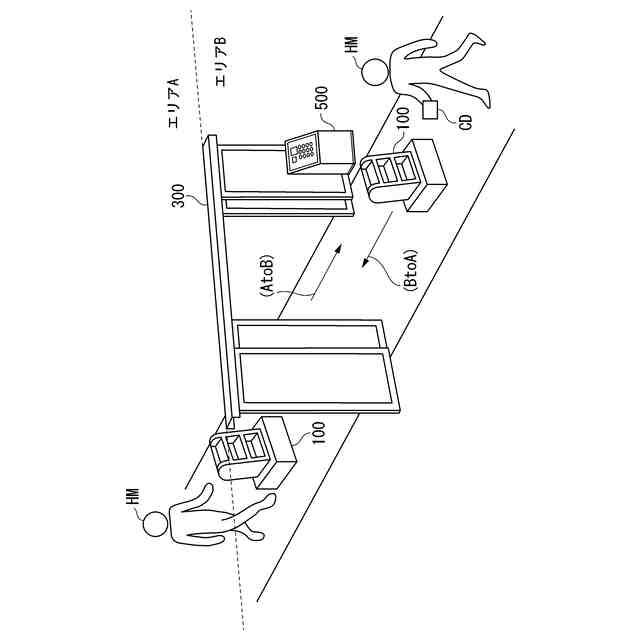
図1は、本実施形態の自律移動体制御システムで、セキュリティーレベルの異なるエリアAとエリアBとの境界に自動ドア300が設けられた建物において、自動ドア300と自律移動体100の連携を実現させた状態を一例として示している。自動ドア300は、エリアAとエリアBに繋がる開口部を、自動ドア300のドア部303で閉塞することでエリアAとエリアBの間の行き来を規制する一方、自動ドア300のドア部303で開口部を開放した状態とすることでエリアAとエリアBとの間を移動可能とする。
以下では、エリアAから自動ドア300を通過してエリアBに進入する方向をAtoB方向とし、エリアBから自動ドア300を通過してエリアAに進入する方向をBtoA方向として説明を行う。また本実施形態では、エリアAは、エリアBに比べ、立ち入り可能な人物が制限された、セキュリティーレベルの高いエリアとしている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
清水建設株式会社
床構造
9日前
清水建設株式会社
連層耐力壁構造
13日前
清水建設株式会社
汚染土壌の原位置浄化方法
10日前
三商株式会社
木材保護塗料
2日前
清水建設株式会社
照明制御システム、照明制御方法
10日前
清水建設株式会社
画像生成システム、及び位置特定方法
6日前
清水建設株式会社
柱状構造物の型枠構造および型枠設置方法
6日前
清水建設株式会社
組積造構造物の補強構造および組積造構造物の補強方法
12日前
清水建設株式会社
汚染土壌の原位置浄化方法及び汚染土壌の原位置浄化システム
10日前
清水建設株式会社
事故発生予測システム、事故発生予測装置、事故発生予測方法、および、プログラム
3日前
個人
開閉補助具
1か月前
個人
盗難防止用アンカー
2か月前
美和ロック株式会社
錠装置
3か月前
美和ロック株式会社
錠装置
3か月前
中国電力株式会社
施錠構造
1か月前
三協立山株式会社
開口部装置
3か月前
株式会社ビットキー
操作装置
3か月前
株式会社マーナ
ドアストッパー
2か月前
株式会社アイシン
車両用通信装置
1か月前
タカハ機工株式会社
電気錠
20日前
東都興業株式会社
ドアロック機構
1か月前
近畿車輌株式会社
下降窓固定構造
2か月前
近畿車輌株式会社
下降窓固定構造
2か月前
株式会社ユキテック
扉機構
2か月前
株式会社ユーシン
シリンダ錠
1か月前
株式会社WEST inx
ドアノブ
3か月前
三協立山株式会社
戸車及び引戸装置
1か月前
株式会社ユニオン
ドアガード
24日前
リョービ株式会社
電動ドアクローザ
9日前
株式会社WEST inx
施解錠装置
3か月前
株式会社LIXIL
箱錠
3か月前
株式会社アイシン
ドア制御装置
2か月前
株式会社アスタリスク
ドア装置
3か月前
株式会社ビットキー
錠装置及び収容器
2か月前
ミネベアミツミ株式会社
電子錠
5日前
株式会社アイシン
車両用ドア装置
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ