TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024094061
公報種別
公開特許公報(A)
公開日
2024-07-09
出願番号
2022210782
出願日
2022-12-27
発明の名称
ロボット制御装置及びロボット教示方法
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20240702BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】カメラによって複数回撮影された画像情報に基づいて目標位置を適切に把握して、対象物を高精度に目標位置に搬送する教示データを生成することが可能なロボット制御装置を提供する。
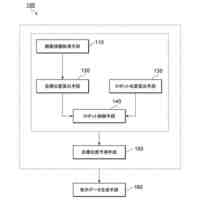
【解決手段】ロボット制御装置100は、少なくとも2ヶ所以上において撮影された各画像情報を取得する画像情報取得手段110と、各画像情報に基づいて目標位置をそれぞれ算出する目標位置算出手段120と、搬送ロボット200のロボット位置を算出するロボット位置算出手段130と、目標位置にロボット位置が一致するように搬送ロボット200を動作させるロボット制御手段140と、目標位置と、搬送ロボット200の移動位置での画像情報に基づいて算出された目標位置とに基づいて目標位置を判定する目標位置判定手段150と、判定結果に応じて、移動位置での画像情報に基づいて算出された目標位置を教示データとして記憶する教示データ生成手段160と、を備える。
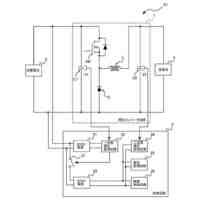
【選択図】図3
特許請求の範囲
【請求項1】
平板状の対象物を搬送する搬送ロボットを制御するロボット制御装置であって、
前記搬送ロボットに取り付けられているカメラによって、前記搬送ロボットが移動する目標位置を含むように、少なくとも2ヶ所以上において撮影された各画像情報を取得する画像情報取得手段と、
前記各画像情報に基づいて前記目標位置をそれぞれ算出する目標位置算出手段と、
前記搬送ロボットの各軸の状態を含むロボット情報に基づいて当該搬送ロボットのロボット位置を算出するロボット位置算出手段と、
前記目標位置に前記ロボット位置が一致するように前記搬送ロボットを動作させるロボット制御手段と、
前記目標位置と、当該目標位置に前記ロボット位置が一致するように前記搬送ロボットが移動した移動位置において撮影された画像情報に基づいて算出された目標位置とに基づいて目標位置を判定する目標位置判定手段と、
前記判定結果に応じて、前記移動位置において撮影された画像情報に基づいて算出された目標位置を教示データとして記憶する教示データ生成手段と、を備える、
ロボット制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記目標位置判定手段は、前記目標位置と、当該目標位置に前記ロボット位置が一致するように前記搬送ロボットが移動した移動位置において撮影された画像情報に基づいて算出された目標位置との差分が閾値以下であるかを判定し、
前記差分が閾値以下である場合、前記教示データ生成手段は、前記移動位置において撮影された画像情報に基づいて算出された目標位置を教示データとして記憶する、
請求項1に記載のロボット制御装置。
【請求項3】
前記差分が閾値以下でない場合、前記ロボット制御手段は、前記移動位置において撮影された画像情報に基づいて算出された目標位置に前記ロボット位置が一致するように前記搬送ロボットを動作させる、
請求項2に記載のロボット制御装置。
【請求項4】
平板状の対象物を搬送する搬送ロボットを制御するロボット制御装置が実行するロボット教示方法であって、
前記搬送ロボットに取り付けられているカメラによって、前記搬送ロボットが移動する目標位置を含むように撮影された画像情報を取得する画像情報取得ステップと、
前記画像情報に基づいて前記目標位置を算出する目標位置算出ステップと、
前記搬送ロボットの各軸の状態を含むロボット情報に基づいて当該搬送ロボットのロボット位置を算出するロボット位置算出ステップと、
前記目標位置に前記ロボット位置が一致するように前記搬送ロボットを動作させるロボット制御ステップと、
前記目標位置と、当該目標位置に前記ロボット位置が一致するように前記搬送ロボットが移動した移動位置において撮影された画像情報に基づいて算出された目標位置とに基づいて目標位置を判定する目標位置判定ステップと、
前記判定結果に応じて、前記移動位置において撮影された画像情報に基づいて算出された目標位置を教示データとして記憶する教示データ生成ステップと、を含む、
ロボット教示方法。
【請求項5】
平板状の対象物を搬送する搬送ロボットを制御するロボット制御装置であって、
前記搬送ロボットに取り付けられているカメラによって、前記搬送ロボットが移動する目標位置を含むように、少なくとも2ヶ所以上において撮影された各画像情報を取得する画像情報取得手段と、
前記各画像情報に基づいて前記目標位置をそれぞれ算出する目標位置算出手段と、
前記搬送ロボットの各軸の状態を含むロボット情報に基づいて当該搬送ロボットのロボット位置を算出するロボット位置算出手段と、
前記目標位置に前記ロボット位置が一致するように前記搬送ロボットを動作させるロボット制御手段と、
前記目標位置に前記ロボット位置が一致するように前記搬送ロボットが移動した移動量に基づいて目標位置を判定する目標位置判定手段と、
前記判定結果に応じて、前記目標位置又は前記搬送ロボットが移動した移動位置を教示データとして記憶する教示データ生成手段と、を備える、
ロボット制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御装置及びロボット教示方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、産業界において、多くのロボットが普及している。当該ロボットは、例えば、電子部品及び機械部品の組み立て、溶接及び搬送等に用いられ、工場の生産ラインの効率化及び自動化が図られている。
【0003】
半導体製造装置に用いられるウエハを搬送する搬送ロボットでは、ウエハを適切な位置へ搬送するためのティーチングを行うが、その精度は、操作者の知識及び熟練度などに依存し、また、操作者の作業スペースが十分に確保できない程の省スペース化が求められている場合もあるため、ティーチングの自動化が図られている。
【0004】
例えば、特許文献1に記載のウエハ搬送ロボットでは、ハンドに取り付けられたカメラによって取出位置に配置されたウエハを撮影し、カメラが取得した画像に基づいて、ウエハの3次元情報を算出し、そのウエハの3次元情報に基づいてハンドを動かして適切にウエハを取り出している。
【先行技術文献】
【特許文献】
【0005】
特開2022-144478号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載のウエハ搬送ロボットでは、カメラが取得した画像に基づいて算出されたウエハの3次元情報の精度が低い場合には、実際に配置されているウエハの位置を把握できずに、適切にウエハを取り出せない可能性がある。
【0007】
また、ティーチングの自動化においては、ウエハの3次元情報だけでなく、ウエハを搬送する目標位置も適切に把握する必要がある。ウエハを搬送する目標位置を把握するために、ウエハ搬送ロボットに取り付けられたカメラで撮影して、当該カメラが取得した画像に基づいて目標位置を算出したとしても、カメラの性能や撮影条件に応じて目標位置を高精度に把握できず、ウエハ搬送ロボットの位置姿勢に基づく位置情報との間にズレが生じてしまうおそれがある。その結果、高精度に、ウエハを目標位置に搬送する教示データを生成できず、適切にウエハを目標位置に搬送できないという問題が生じる。
【0008】
そこで、本発明は、カメラによって複数回撮影された画像情報に基づいて目標位置を適切に把握して、対象物を高精度に目標位置に搬送する教示データを生成することが可能なロボット制御装置及びロボット教示方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一態様に係るロボット制御装置は、平板状の対象物を搬送する搬送ロボットを制御するロボット制御装置であって、搬送ロボットに取り付けられているカメラによって、搬送ロボットが移動する目標位置を含むように、少なくとも2ヶ所以上において撮影された各画像情報を取得する画像情報取得手段と、各画像情報に基づいて目標位置をそれぞれ算出する目標位置算出手段と、搬送ロボットの各軸の状態を含むロボット情報に基づいて当該搬送ロボットのロボット位置を算出するロボット位置算出手段と、目標位置にロボット位置が一致するように搬送ロボットを動作させるロボット制御手段と、目標位置と、当該目標位置にロボット位置が一致するように搬送ロボットが移動した移動位置において撮影された画像情報に基づいて算出された目標位置とに基づいて目標位置を判定する目標位置判定手段と、判定結果に応じて、移動位置において撮影された画像情報に基づいて算出された目標位置を教示データとして記憶する教示データ生成手段と、を備える。
【0010】
この態様によれば、画像情報取得手段は、カメラによって少なくとも2ヶ所以上において撮影された各画像情報を取得し、目標位置算出手段は、各画像情報に基づいて目標位置をそれぞれ算出する。ロボット位置算出手段は、搬送ロボットの各軸の状態を含むロボット情報に基づいて当該搬送ロボットのロボット位置を算出し、ロボット制御手段は、目標位置にロボット位置が一致するように搬送ロボットを動作させる。そして、目標位置判定手段は、目標位置と、当該目標位置にロボット位置が一致するように搬送ロボットが移動した移動位置において撮影された画像情報に基づいて算出された目標位置とに基づいて目標位置を判定して、教示データ生成手段は、当該判定結果に応じて移動位置において撮影された画像情報に基づいて算出された目標位置を教示データとして記憶する。これにより、目標位置を適切に把握して、対象物を高精度に目標位置に搬送する教示データを生成することができ、その結果、当該教示データを用いることで対象物を高精度に目標位置に搬送することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
溶接装置
2日前
株式会社ダイヘン
溶接装置
2日前
株式会社ダイヘン
溶接装置
2日前
株式会社ダイヘン
溶接装置
2日前
株式会社ダイヘン
電力供給装置
1日前
株式会社ダイヘン
電力変換装置
1日前
株式会社ダイヘン
溶接評価装置
1日前
株式会社ダイヘン
プラズマ発生器
3日前
株式会社ダイヘン
双方向コンバータ
3日前
株式会社ダイヘン
双方向コンバータ
3日前
株式会社ダイヘン
双方向コンバータ
3日前
株式会社ダイヘン
溶接トーチボディ
7日前
株式会社ダイヘン
インチング制御方法
1日前
株式会社ダイヘン
アークスタート制御方法
1日前
株式会社ダイヘン
搬送装置および搬送方法
3日前
株式会社ダイヘン
複数の溶接電源による溶接方法
1日前
株式会社ダイヘン
ロボット制御装置及びロボット教示方法
2日前
株式会社ダイヘン
溶接波形制御装置及び溶接波形制御方法
1日前
株式会社ダイヘン
溶接波形制御装置及び溶接波形制御方法
1日前
株式会社ダイヘン
ロボット制御装置及び搬送ロボットシステム
今日
個人
木製ハンマー
1か月前
個人
関節モジュール
1か月前
個人
寸切りボルト回し
1か月前
個人
スロットルトリガー
1か月前
中国電力株式会社
腰袋
4か月前
太陽工業株式会社
チャック装置
29日前
コクヨ株式会社
補助器具
1か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
衝撃工具
3か月前
個人
メンテナンス用スタンド
3か月前
東京計器株式会社
接触検知装置
2か月前
トヨタ自動車株式会社
ロボット
2か月前
オムロン株式会社
電動把持工具
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ