TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024092559
公報種別
公開特許公報(A)
公開日
2024-07-08
出願番号
2022208591
出願日
2022-12-26
発明の名称
位置算出方法および位置算出装置
出願人
株式会社東陽テクニカ
代理人
個人
主分類
G01C
21/16 20060101AFI20240701BHJP(測定;試験)
要約
【課題】加速度の時系列データおよび角速度の時系列データを用いて、移動体の位置の時系列データをより精度良く算出できる位置算出方法および位置算出装置を提供する。
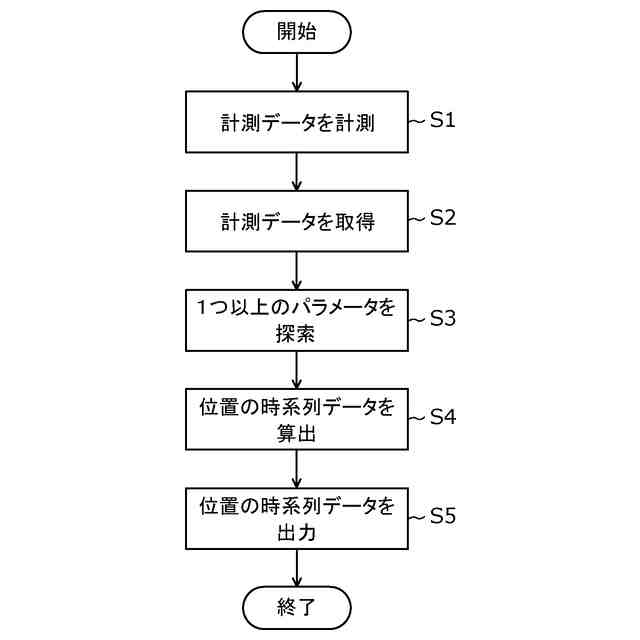
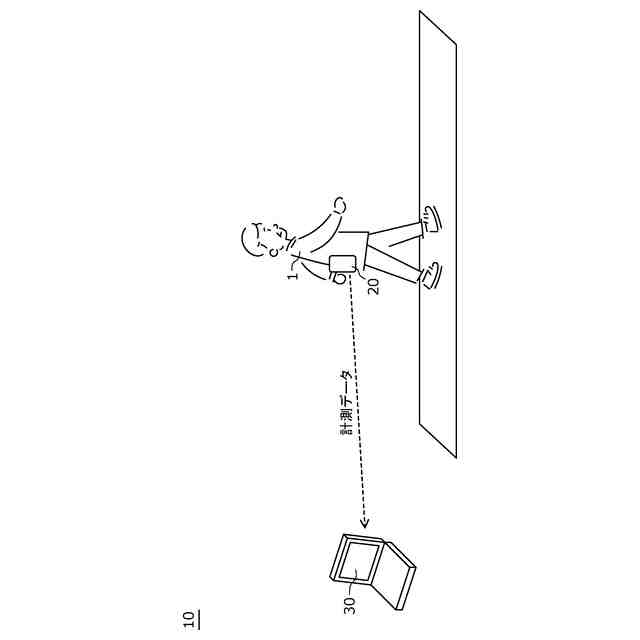
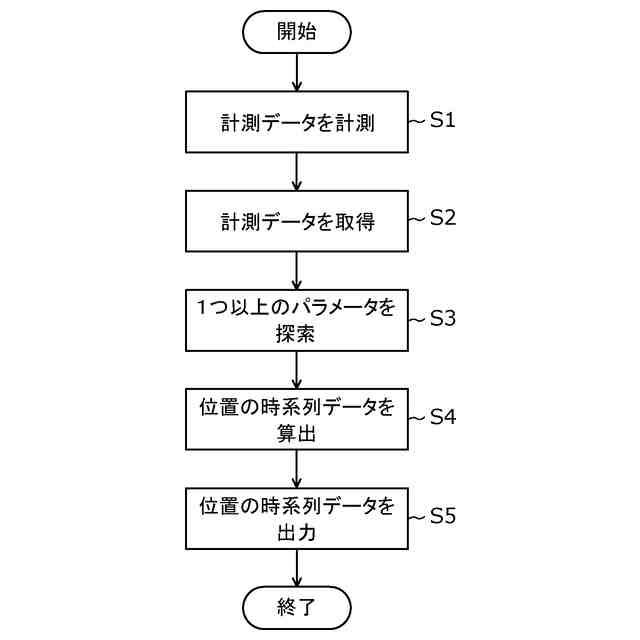
【解決手段】位置算出方法は、移動体に取り付けられかつ加速度および角速度を計測する計測器20によって計測される計測データであって、加速度の時系列データおよび角速度の時系列データを含む計測データを取得する取得ステップ(ステップS2)と、計測データを用いて算出される移動体の移動前の位置および計測データを用いて算出される移動体の移動後の位置に関する誤差を最小化する1つ以上のパラメータを探索する探索ステップ(ステップS3)と、計測データおよび1つ以上のパラメータを用いて、移動体の位置の時系列データを算出する算出ステップ(ステップS4)とを備える。
【選択図】図4
特許請求の範囲
【請求項1】
移動体に取り付けられかつ加速度および角速度を計測する計測器によって計測される計測データであって、加速度の時系列データおよび角速度の時系列データを含む計測データを取得する取得ステップと、
前記計測データを用いて算出される前記移動体の移動前の位置および前記計測データを用いて算出される前記移動体の移動後の位置に関する誤差を最小化する1つ以上のパラメータを探索する探索ステップと、
前記計測データおよび前記1つ以上のパラメータを用いて、前記移動体の位置の時系列データを算出する算出ステップとを備える、
位置算出方法。
続きを表示(約 1,000 文字)
【請求項2】
前記計測データを用いて算出される前記移動体の移動前の位置および前記計測データを用いて算出される前記移動体の移動後の位置に関する前記誤差は、前記計測データを用いて算出される前記移動体の移動前の位置の平均値に関する誤差、前記計測データを用いて算出される前記移動体の移動前の位置の変化の傾きに関する誤差、前記計測データを用いて算出される前記移動体の移動後の位置の平均値に関する誤差、および前記計測データを用いて算出される前記移動体の移動後の位置の変化の傾きに関する誤差を含む、
請求項1に記載の位置算出方法。
【請求項3】
前記計測データを用いて算出される前記移動体の移動後の位置の平均値に関する前記誤差は、前記計測データを用いて算出される前記移動体の移動後の位置の平均値と、カメラ、床反力計、および方眼紙の少なくとも1つを用いて検出される前記移動体の移動後の位置との差を含む、
請求項2に記載の位置算出方法。
【請求項4】
前記1つ以上のパラメータは、前記計測器の加速度のオフセット誤差を補正するパラメータ、前記計測器の加速度のスケールファクタ誤差を補正するパラメータ、前記計測器の角速度のオフセット誤差を補正するパラメータ、前記計測器の角速度のスケールファクタ誤差を補正するパラメータ、重力加速度のスケールファクタ誤差を補正するパラメータ、前記計測器の初期チルト角のオフセット誤差を補正するパラメータ、および前記計測データを用いて算出される速度のオフセット誤差を補正するパラメータを含む、
請求項1から3のいずれか1項に記載の位置算出方法。
【請求項5】
前記探索ステップでは、ベイズ最適化を用いて前記1つ以上のパラメータを探索する、
請求項1から3のいずれか1項に記載の位置算出方法。
【請求項6】
移動体に取り付けられかつ加速度および角速度を計測する計測器によって計測される計測データであって、加速度の時系列データおよび角速度の時系列データを含む計測データを取得する取得部と、
前記計測データを用いて算出される前記移動体の移動前の位置および前記計測データを用いて算出される前記移動体の移動後の位置に関する誤差を最小化する1つ以上のパラメータを探索する探索部と、
前記計測データおよび前記1つ以上のパラメータを用いて、前記移動体の位置の時系列データを算出する算出部とを備える、
位置算出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の位置を算出する位置算出方法および位置算出装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来技術の一例として、特許文献1には、向き転換軌跡の誤差が最小または極小となる値または値の組を、少なくとも1つのパラメータの較正結果に決定する較正決定手段を有する角速度測定装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2014-98613号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の角速度測定装置は、位置の時系列データを算出するものではない。ところで、加速度の時系列データおよび角速度の時系列データを用いて、移動体の位置の時系列データをより精度良く算出することが望まれている。加速度および角速度の時系列データはたとえばIMU(Inertial Measurement Unit)で計測データとして得られるが、加速度および角速度の時系列データに含まれる微小なオフセット値等により、加速度を時間積分することで得られる速度や、速度を時間積分して得られる位置に大きな誤差が生じるという問題がある。IMUを含む計測器の高性能化に伴いオフセット値は小さくなってきているものの積分誤差の影響は大きく、現状ではIMU等の計測器で得られた加速度、角速度データから高精度な位置算出は困難とされている。
【0005】
そこで、本発明は、加速度の時系列データおよび角速度の時系列データを用いて、移動体の位置の時系列データをより精度良く算出できる位置算出方法および位置算出装置を提供する。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、本発明の一態様に係る位置算出方法は、移動体に取り付けられかつ加速度および角速度を計測する計測器によって計測される計測データであって、加速度の時系列データおよび角速度の時系列データを含む計測データを取得する取得ステップと、前記計測データを用いて算出される前記移動体の移動前の位置および前記計測データを用いて算出される前記移動体の移動後の位置に関する誤差を最小化する1つ以上のパラメータを探索する探索ステップと、前記計測データおよび前記1つ以上のパラメータを用いて、前記移動体の位置の時系列データを算出する算出ステップとを備える。
【0007】
また、上記の目的を達成するために、本発明の一態様に係る位置算出装置は、移動体に取り付けられかつ加速度および角速度を計測する計測器によって計測される計測データであって、加速度の時系列データおよび角速度の時系列データを含む計測データを取得する取得部と、前記計測データを用いて算出される前記移動体の移動前の位置および前記計測データを用いて算出される前記移動体の移動後の位置に関する誤差を最小化する1つ以上のパラメータを探索する探索部と、前記計測データおよび前記1つ以上のパラメータを用いて、前記移動体の位置の時系列データを算出する算出部とを備える。
【発明の効果】
【0008】
本発明に係る位置算出方法および位置算出装置によれば、加速度の時系列データおよび角速度の時系列データを用いて、移動体の位置の時系列データをより精度良く算出できる。
【図面の簡単な説明】
【0009】
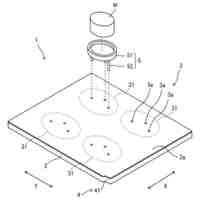
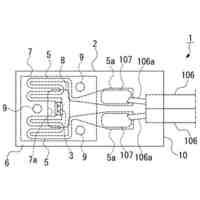
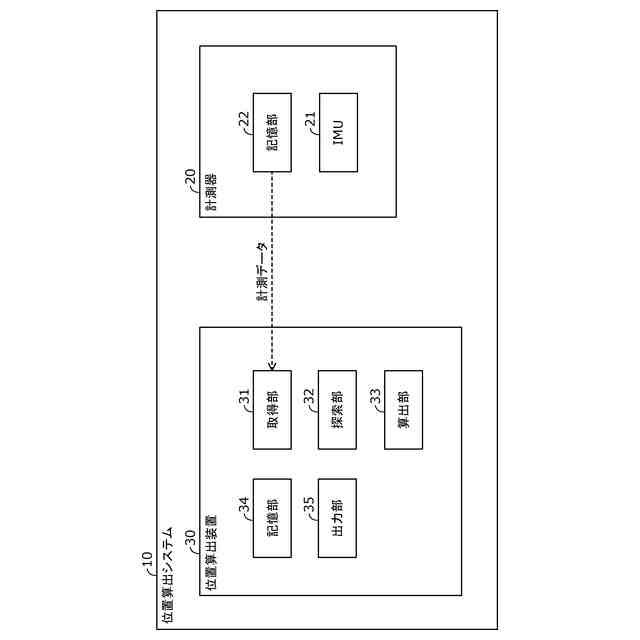
図1は、実施の形態に係る位置算出システムを示す模式図である。
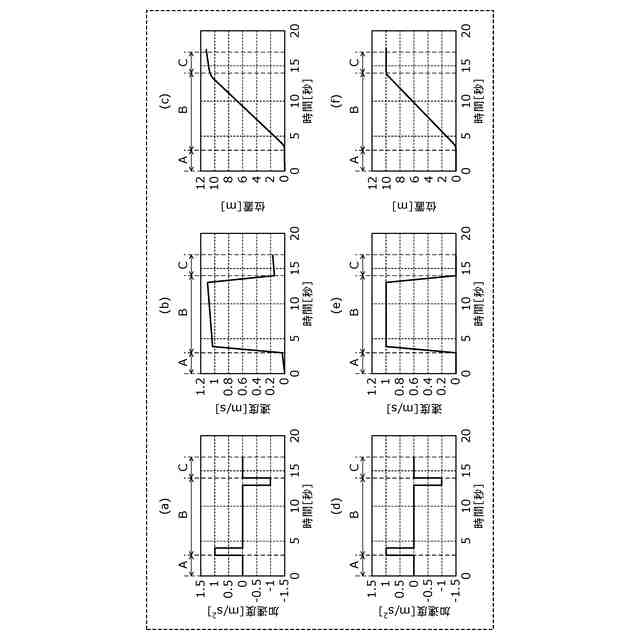
図2は、加速度の時系列データ、速度の時系列データ、および位置の時系列データの一例を示すグラフである。
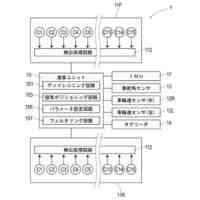
図3は、図1の位置算出システムの機能構成を示すブロック図である。
図4は、図1の位置算出システムによる位置算出方法の一例を示すフローチャートである。
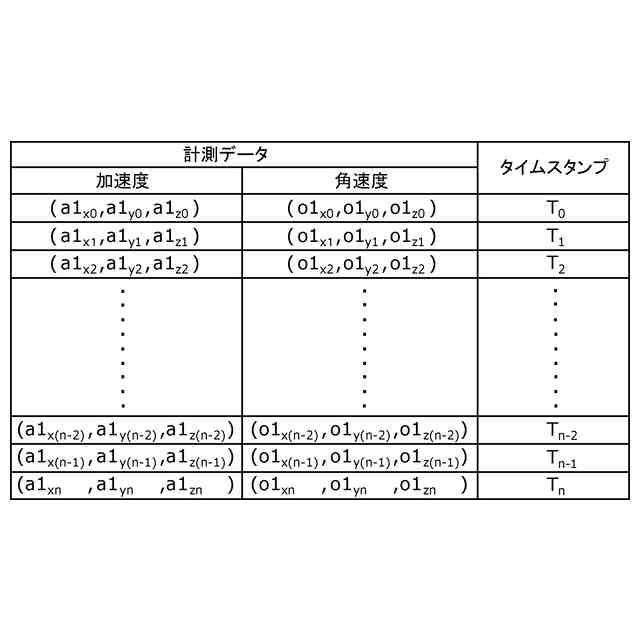
図5は、計測データの一例を示す表である。
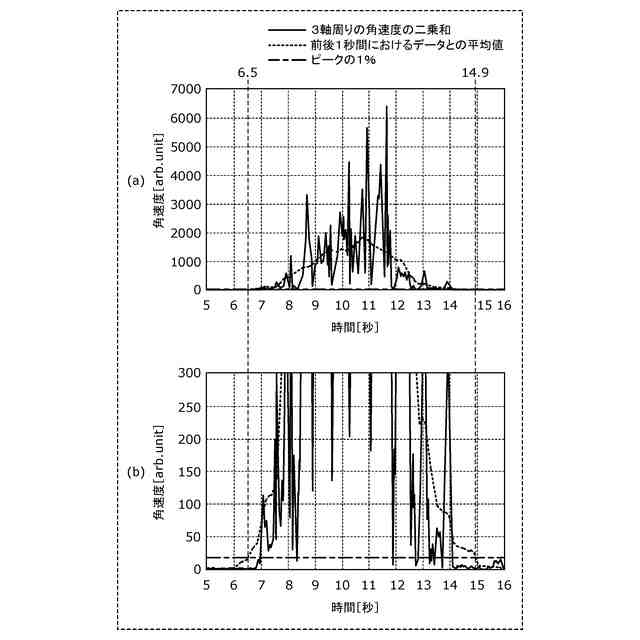
図6は、角速度の二乗和の時系列データ等の一例を示すグラフである。
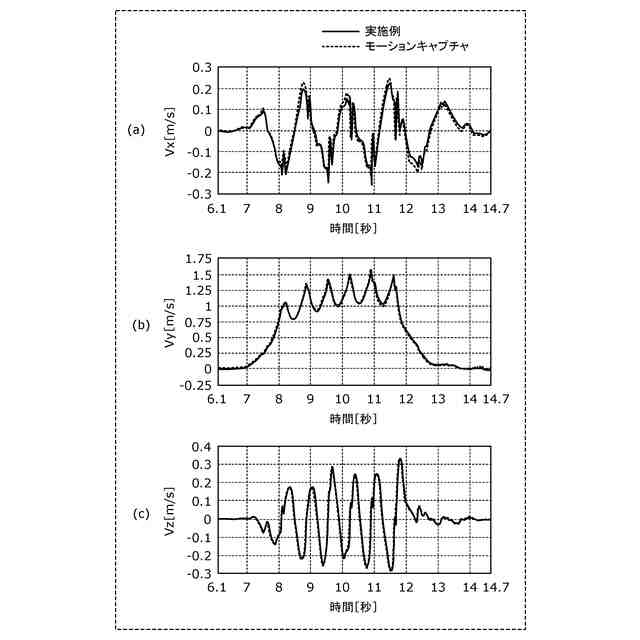
図7は、実施例に係る速度の時系列データを示すグラフである。
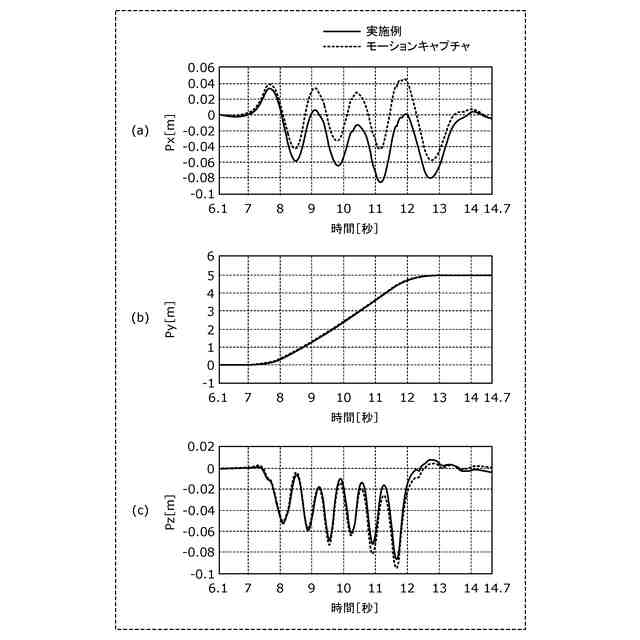
図8は、実施例に係る位置の時系列データを示すグラフである。
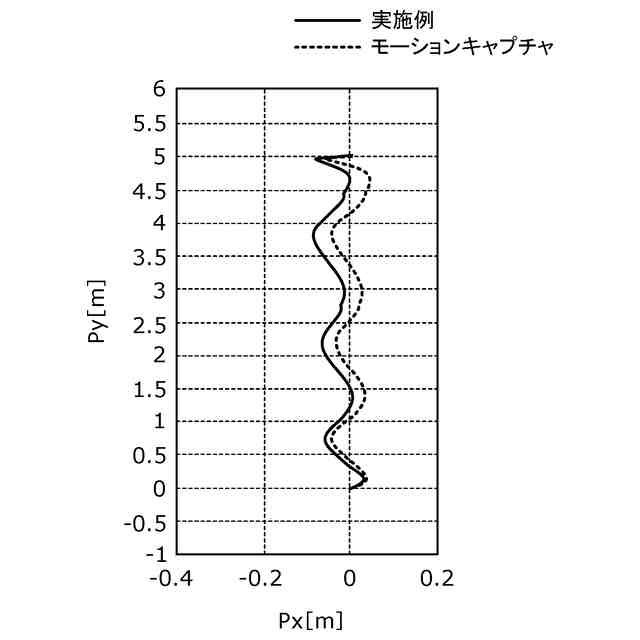
図9は、実施例に係るX軸方向の位置とY軸方向の位置との関係を示すグラフである。
図10は、比較例に係る速度の時系列データを示すグラフである。
図11は、比較例に係る位置の時系列データを示すグラフである。
図12は、比較例に係るX軸方向の位置とY軸方向の位置との関係を示すグラフである。
【発明を実施するための形態】
【0010】
以下、実施の形態について、図面を参照しながら具体的に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
表示装置
10日前
甲神電機株式会社
電流センサ
今日
株式会社コロナ
石油ストーブ
17日前
アズビル株式会社
調節計
3日前
株式会社ヨコオ
プローブ
10日前
太陽誘電株式会社
センサ
13日前
個人
電気抵抗の測定方法
25日前
株式会社小野測器
検出器
3日前
株式会社小野測器
測定器
3日前
ユニパルス株式会社
距離測定装置
7日前
株式会社トプコン
測量装置
3日前
太陽誘電株式会社
検出装置
28日前
株式会社トプコン
測量装置
17日前
北陽電機株式会社
光電センサ
24日前
株式会社カネカ
検出システム
3日前
日本碍子株式会社
ガスセンサ
3日前
エイブリック株式会社
電流検出回路。
3日前
個人
変位測定装置
10日前
株式会社ナリス化粧品
肌状態推定方法
3日前
個人
二次電池繰返パルス放電器用基板
10日前
株式会社東芝
センサ
28日前
株式会社キーエンス
超音波流量センサ
28日前
日本碍子株式会社
ガスセンサ素子
3日前
大和製衡株式会社
組合せ計量装置
18日前
日本碍子株式会社
ガスセンサ素子
3日前
日本特殊陶業株式会社
ガスセンサ
7日前
愛知製鋼株式会社
位置推定システム
1か月前
ニデック株式会社
測定用治具
25日前
ニデック株式会社
測定用治具
25日前
ローム株式会社
磁気検出装置
18日前
スズキ株式会社
車両後部構造
7日前
株式会社デンソートリム
ガスセンサ
10日前
株式会社ジークエスト
感温センサー
28日前
オムロン株式会社
近接センサ
7日前
三菱マテリアル株式会社
温度センサ
13日前
三菱マテリアル株式会社
温度センサ
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ