TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024087682
公報種別
公開特許公報(A)
公開日
2024-07-01
出願番号
2022202621
出願日
2022-12-19
発明の名称
半導体製造装置、ピックアップ装置および半導体装置の製造方法
出願人
ファスフォードテクノロジ株式会社
代理人
ポレール弁理士法人
主分類
H01L
21/52 20060101AFI20240624BHJP(基本的電気素子)
要約
【課題】ダイの割れ不良や欠け不良を低減することが可能な技術を提供することにある。
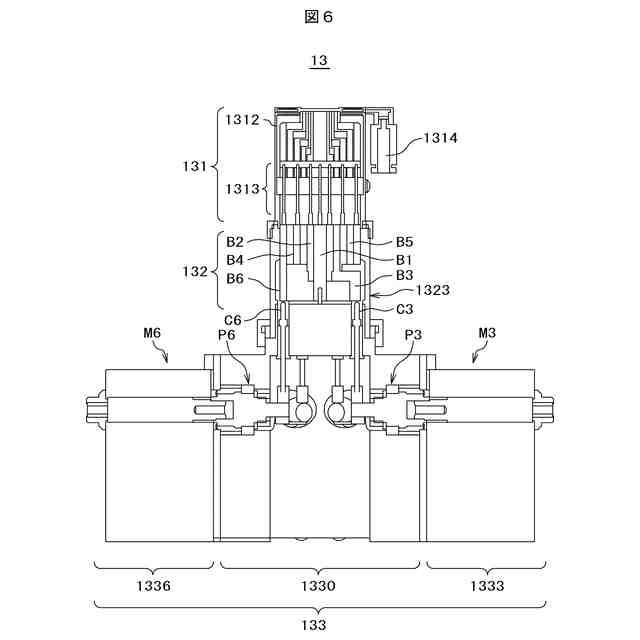
【解決手段】半導体製造装置は、ダイが貼付されたダイシングテープを保持するウエハ保持台と、前記ダイシングテープと接触する複数のブロックと、前記複数のブロックに独立して上下動を伝える複数の駆動軸と、前記複数の駆動軸に独立して上下動を伝える複数のプランジャ機構と、前記複数のブロックのそれぞれの高さを測定するための複数の変位計と、を有する突上げユニットと、前記突上げユニットを制御する制御部と、を備える。前記複数の変位計は、前記複数のブロックまたは前記複数の駆動軸または前記複数のプランジャ機構に設けられる。
【選択図】図6
特許請求の範囲
【請求項1】
ダイが貼付されたダイシングテープを保持するウエハ保持台と、
前記ダイシングテープと接触する複数のブロックと、前記複数のブロックに独立して上下動を伝える複数の駆動軸と、前記複数の駆動軸に独立して上下動を伝える複数のプランジャ機構と、前記複数のブロックのそれぞれの高さを測定するための複数の変位計と、を有する突上げユニットと、
前記突上げユニットを制御する制御部と、
を備え、
前記複数の変位計は、前記複数のブロックまたは前記複数の駆動軸または前記複数のプランジャ機構に設けられる半導体製造装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の半導体製造装置において、
前記突上げユニットは、前記複数のプランジャ機構のそれぞれを作動させる複数のモータと、前記複数のモータのそれぞれの回転位置を検出する複数のエンコーダと、を備える半導体製造装置。
【請求項3】
請求項2に記載の半導体製造装置において、
前記制御部は、前記複数の変位計によって測定された前記複数のブロックのそれぞれの高さと、前記複数のエンコーダによって検出された前記複数のモータのそれぞれの回転位置とを比較して、前記複数のブロックを作動させるよう構成される半導体製造装置。
【請求項4】
請求項2に記載の半導体製造装置において、
前記制御部は、前記複数の変位計によって測定された前記複数のブロックのそれぞれの高さと、前記複数のエンコーダによって検出された前記複数のモータのそれぞれの回転位置を比較して、前記複数のブロックの作動異常の判断を行うよう構成される半導体製造装置。
【請求項5】
請求項1から4の何れか1項の半導体製造装置において、
前記突上げユニットは、さらに、前記駆動軸を収納し、透磁素材で構成れる外周部を有し、
前記変位計は、前記駆動軸に設けられたマグネットと、前記外周部の外側面に設けられた検知部と、を備える半導体製造装置。
【請求項6】
請求項1から4の何れか1項の半導体製造装置において、
前記変位計は、レーザ変位センサ、分光干渉式センサまたは渦電流センサである半導体製造装置。
【請求項7】
請求項2の半導体製造装置において、
前記突上げユニットは、前記複数のブロックを有する第一ユニットと、前記駆動軸を有する第二ユニットと、前記複数のプランジャ機構を有する第三ユニットと、を備える半導体製造装置。
【請求項8】
請求項2の半導体製造装置において、
前記突上げユニットは、前記複数のブロックを有する第一ユニットと、前記駆動軸の上下動を前記複数のブロックに伝える第二ユニットと、前記駆動軸および前記複数のプランジャ機構を有する第三ユニットと、を備える半導体製造装置。
【請求項9】
請求項1から4の何れか1項の半導体製造装置において、
さらに、前記複数のブロックの所定動作シーケンスにおいて、前記複数の変位計の測定結果に基づいて前記複数のブロックのそれぞれの高さの制御を行うよう構成される制御部を備え、
前記所定動作シーケンスは、前記複数のブロックのブロック毎に複数のステップで構成され、前記複数のステップの各ステップの長さはブロックの上昇または下降が終了してから次のステップにおけるブロックの上昇または下降が始まるまでの時間で設定される半導体製造装置。
【請求項10】
請求項1から4の何れか1項の半導体製造装置において、
前記制御部は、前記複数のブロックの所定動作シーケンスにおいて、前記複数のブロックの各ブロックの高さを測定し、その測定値を記録するよう構成され、
前記所定動作シーケンスは、複数のブロックのブロック毎に複数のステップで構成され、前記複数のステップの各ステップの長さは時間で設定される半導体製造装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は半導体製造装置に関し、例えば突き上げユニットを有するダイボンダに適用可能である。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
ダイボンダ等の半導体製造装置は、接合材料を用いて、例えば、素子を基板または素子の上にボンド(載置して接着)する装置である。接合材料は、例えば、液状またはフィルム状の樹脂やはんだ等である。素子は、例えば、半導体チップ、MEMS(Micro Electro Mechanical System)およびガラスチップ等のダイや電子部品である。基板は、例えば、配線基板や金属薄板で形成されるリードフレーム、ガラス基板等である。
【0003】
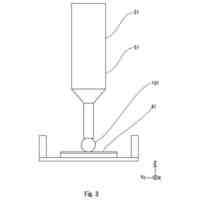
例えば、ダイボンダによるダイボンディング工程の中には、半導体ウエハ(以下、単に、ウエハという。)から分割されたダイをダイシングテープから剥離する剥離工程がある。剥離工程では、例えば、ダイシングテープ裏面から突上げユニットによってダイを突き上げて、ウエハ供給部に保持されたダイシングテープから、1個ずつ剥離し、ピックアップヘッドまたはボンドヘッドに設けられたコレット等の吸着ノズルを使ってダイがピックアップされる。
【0004】
例えば、特開2017-224640号公報(特許文献1)によれば、ダイシングテープに貼り付けられた複数のダイのうち剥離対象のダイを突き上げてダイシングテープから剥離する際に、突上げユニットは、複数の駆動軸によって複数のブロックを上下動させることでダイの周辺からダイシングテープを剥離している。
【先行技術文献】
【特許文献】
【0005】
特開2017-224640号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
複数の駆動軸は複数の駆動部(例えば、プランジャ機構)によって上下動させられるので、駆動部の剛性が低い場合、負荷量によっては複数のブロックの高さ(位置)が変動することがある。あるいは、複数のブロック間の高さ(位置)にズレが生じることがある。これらのいずれかによって、ダイの割れ不良や欠け不良が発生することがある。
【0007】
本開示の課題は、ダイの割れ不良や欠け不良を低減することが可能な技術を提供することにある。その他の課題と新規な特徴は、本明細書の記述および添付図面から明らかになるであろう。
【課題を解決するための手段】
【0008】
本開示のうち代表的なものの概要を簡単に説明すれば下記の通りである。
すなわち、半導体製造装置は、ダイが貼付されたダイシングテープを保持するウエハ保持台と、前記ダイシングテープと接触する複数のブロックと、前記複数のブロックに独立して上下動を伝える複数の駆動軸と、前記複数の駆動軸に独立して上下動を伝える複数のプランジャ機構と、前記複数のブロックのそれぞれの高さを測定するための複数の変位計と、を有する突上げユニットと、前記突上げユニットを制御する制御部と、を備える。前記複数の変位計は、前記複数のブロックまたは前記複数の駆動軸または前記複数のプランジャ機構に設けられる。
【発明の効果】
【0009】
本開示によれば、ダイの割れ不良や欠け不良を低減することが可能である。
【図面の簡単な説明】
【0010】
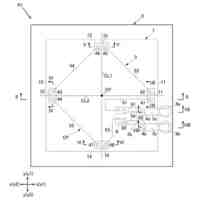
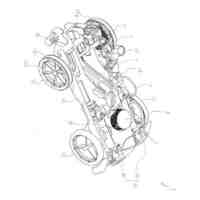
図1は実施形態におけるダイボンダの構成例を示す概略上面図である。
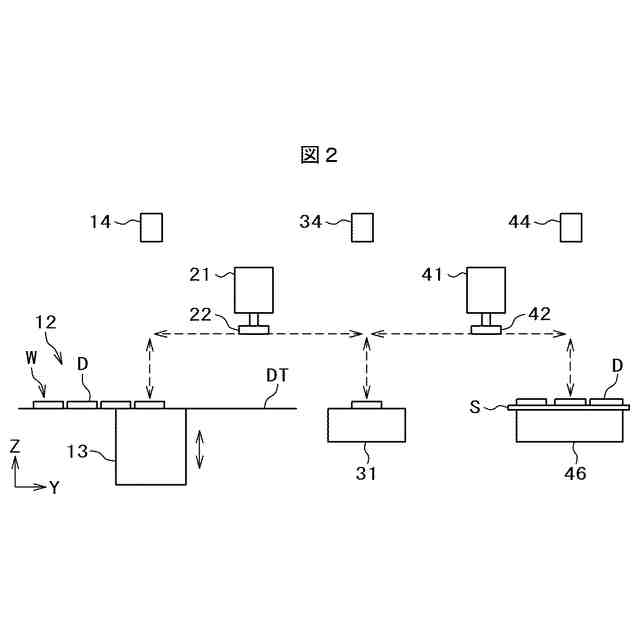
図2は図1において矢印A方向から見たときの概略構成を説明する図である。
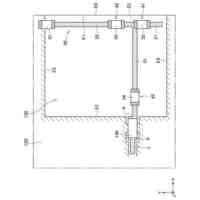
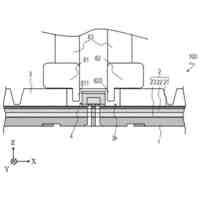
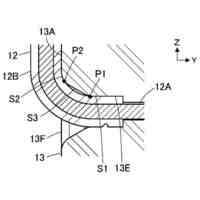
図3は図1に示すウエハ供給部の主要部を示す概略断面図である。
図4は図1に示すダイボンダの制御系の概略構成を示すブロック図である。
図5は図1に示すダイボンダを用いた半導体装置の製造方法を示すフローチャートである。
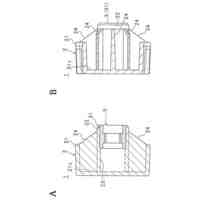
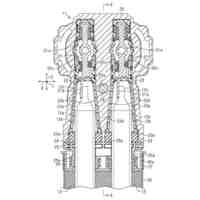
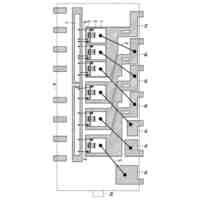
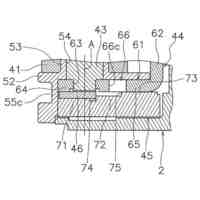
図6は実施形態における突上げユニットの縦断面を示す図である。
図7は図6に示す突上げユニットの別の縦断面を示す図である。
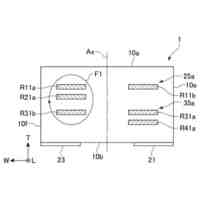
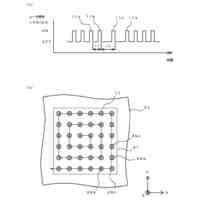
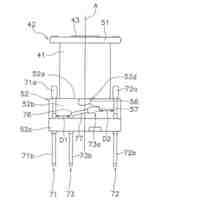
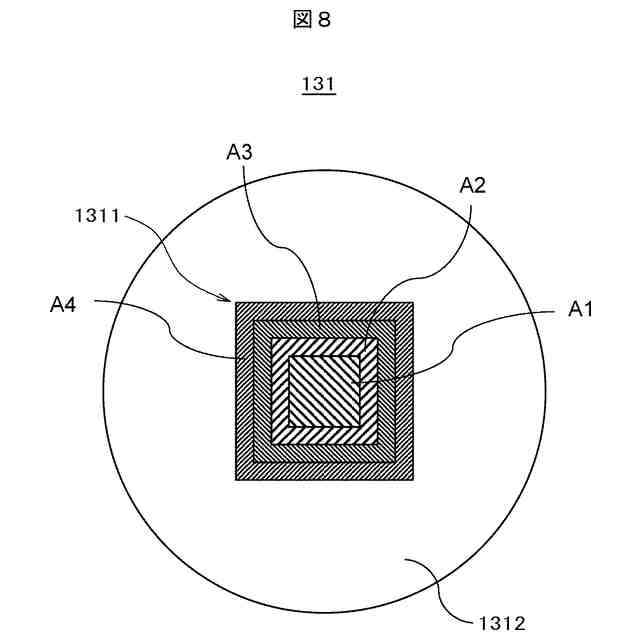
図8は図6に示す第1ユニットの一部の上面図である。
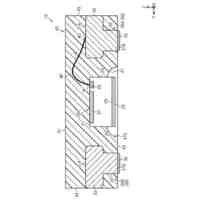
図9は図7に示すE-E線における第2ユニットの一部の断面を示す図である。
図10は図6に示す第3ユニットの一部の上面図である。
図11は突上げユニットのモータとモータ制御装置を示すブロック図である。
図12(a)~図12(d)はRMSの突上げシーケンスの一例を示す突上げユニットの断面図である。図12(a)は第一状態を示す図であり、図12(b)は第二状態を示す図であり、図12(c)は第三状態を示す図であり、図12(d)は第四状態を示す図である。
図13は図12(a)~図12(d)のシーケンスのブロック動作タイミングの一例を示す図である。
図14は図13のブロック動作タイミングに対応する高さ位置制御の場合のタイムチャートレシピの一例を示す図である。
図15は図13のブロック動作タイミングに対応する第一変形例におけるタイムチャートレシピを示す図である。
図16は第二変形例におけるブロック高さの制御方法を示すフローチャートである。
図17は第三変形例におけるブロック高さの制御方法を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
集積回路
20日前
株式会社GSユアサ
蓄電装置
12日前
株式会社PFA
異物除去具
10日前
ローム株式会社
半導体装置
10日前
株式会社魁半導体
プラズマ処理装置
13日前
太陽誘電株式会社
コイル部品
26日前
太陽誘電株式会社
コイル部品
26日前
株式会社ダイヘン
碍子
4日前
マクセル株式会社
電池
5日前
トヨタ自動車株式会社
搬送装置
3日前
株式会社ヨコオ
変換回路
10日前
京セラ株式会社
積層型電子部品
3日前
日本航空電子工業株式会社
押釦
17日前
住友電装株式会社
コネクタ
5日前
ローム株式会社
半導体装置
19日前
東レ株式会社
ポリマー電解質および電池
27日前
住友電装株式会社
コネクタ
6日前
シャープ株式会社
入力装置
17日前
三洲電線株式会社
撚線導体
13日前
東レエンジニアリング株式会社
転写方法
17日前
東レエンジニアリング株式会社
転写装置
3日前
TDK株式会社
アンテナ装置
20日前
三菱電機株式会社
半導体装置
24日前
オムロン株式会社
電磁石装置
10日前
オムロン株式会社
電磁石装置
10日前
三菱電機株式会社
半導体装置
11日前
住友電装株式会社
雌端子金具
11日前
日亜化学工業株式会社
面状光源の製造方法
26日前
日本圧着端子製造株式会社
コネクタ
6日前
三菱電機株式会社
半導体装置
24日前
オムロン株式会社
電磁継電器
19日前
レボックス株式会社
光源装置
1か月前
オムロン株式会社
電磁継電器
19日前
三菱電機株式会社
半導体装置
3日前
株式会社はくぶん
電池ボックス装置
6日前
日本航空電子工業株式会社
コネクタ
10日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ