TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024086577
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2023179519,2022200206
出願日
2023-10-18,2022-12-15
発明の名称
掃除ロボット
出願人
株式会社オカムラ
代理人
個人
,
個人
,
個人
,
個人
主分類
A47L
9/28 20060101AFI20240620BHJP(家具;家庭用品または家庭用設備;コーヒーひき;香辛料ひき;真空掃除機一般)
要約
【課題】吸引用モータに過大な負荷、瞬間的な負荷変動、突入電流等が生じたとしても、その影響が走行に関する機器に及ぶことを防止できる掃除ロボットを提供する。
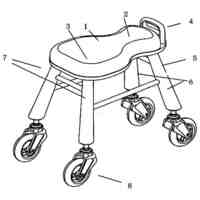
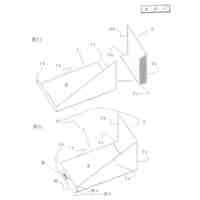
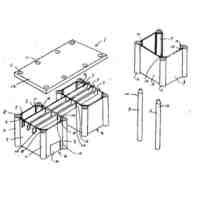
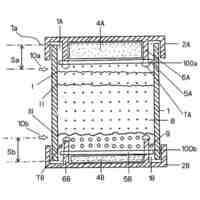
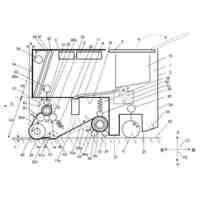
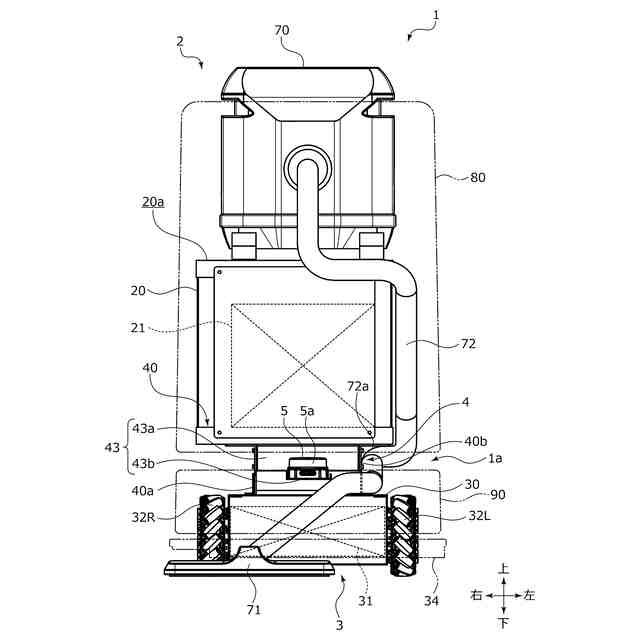
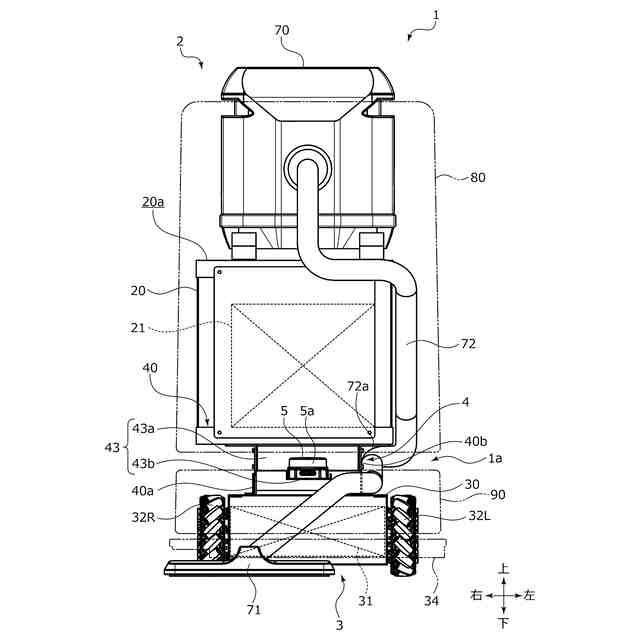
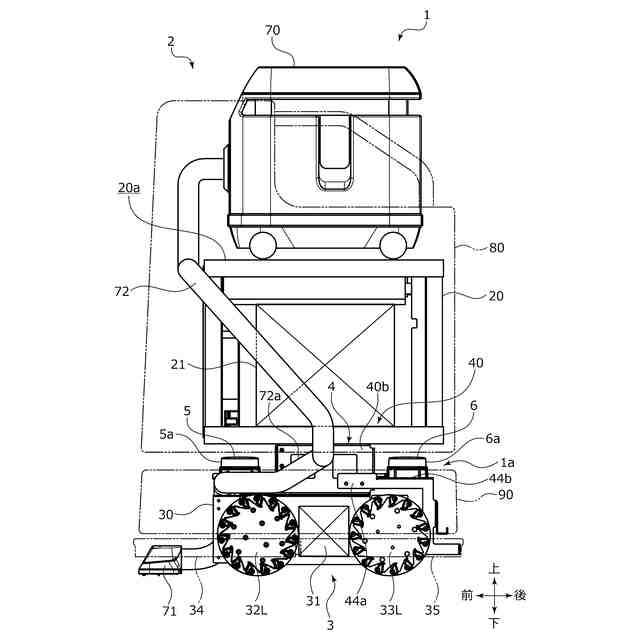
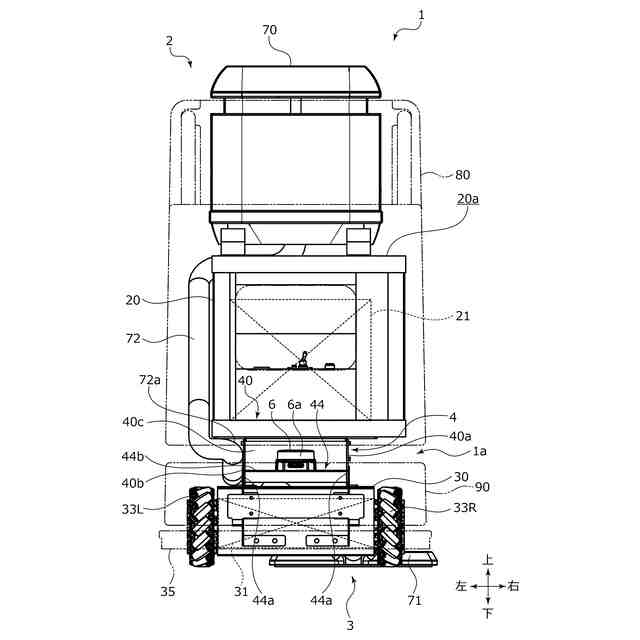
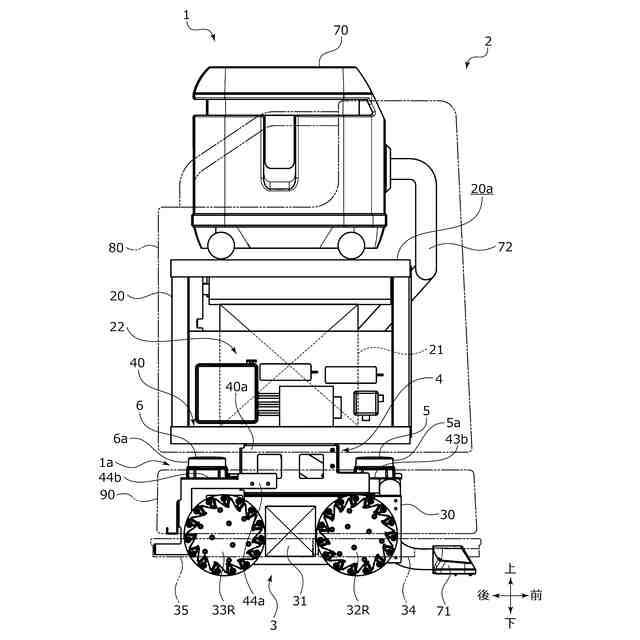
【解決手段】吸引用モータを備え複数の旋回キャスタにて床面を走行可能な事業用掃除機本体70と、走行用モータを備え自律走行可能な走行台車と、を備えた掃除ロボット1であって、吸引用モータの駆動に用いられる吸引用バッテリ21と、走行用モータの駆動に用いられる走行用バッテリ31と、を備え、吸引用バッテリ21は走行用バッテリ31の上方に配置されている。
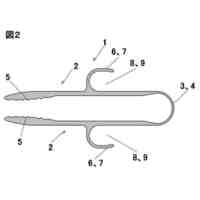
【選択図】図2
特許請求の範囲
【請求項1】
吸引用モータを備え、複数の旋回キャスタにて床面を走行可能な事業用掃除機本体と、
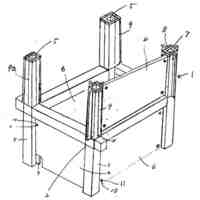
走行用モータを備え、自律走行可能な走行台車と、
を備えた掃除ロボットであって、
前記吸引用モータの駆動に用いられる吸引用バッテリと、
前記走行用モータの駆動に用いられる走行用バッテリと、を備え、
前記吸引用バッテリは、前記走行用バッテリの上方に配置されていることを特徴とする掃除ロボット。
続きを表示(約 100 文字)
【請求項2】
前記走行台車は、前方に一対の車輪と、後方に一対の車輪を備え、
前記走行用バッテリは、前後の前記車輪の間に配置されていることを特徴とする請求項1に記載の掃除ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行可能な掃除ロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
オフィス、商業施設、宿泊施設などにおいて、衛生管理の一環として掃除機を用いて床面に落ちている塵埃を捕集する掃除が行われている。近年では、人件費高騰、人材不足などの要因により、作業者に掛かる負担を軽減するべく、塵埃を吸引させながら床面を自律走行させることを可能とした掃除ロボットに対する需要が高まってきている。
【0003】
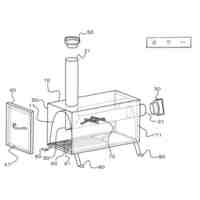
例えば、特許文献1に示される掃除ロボットは、走行部と、走行部内部における上方に配置される掃除機本体と、走行部の下部に配置されるノズルと、走行部内部に配置され掃除機本体とノズルとを接続するパイプと、を備え、自律走行可能に構成されている。この掃除ロボットは、掃除機本体を駆動させてノズルより吸引した塵埃をパイプを通じて掃除機本体内に捕集させながら自立走行させることにより、対象区域内を掃除することが可能となっている。
【先行技術文献】
【特許文献】
【0004】
特許第6227948号公報(第5頁、第1図)
【発明の概要】
【発明が解決しようとする課題】
【0005】
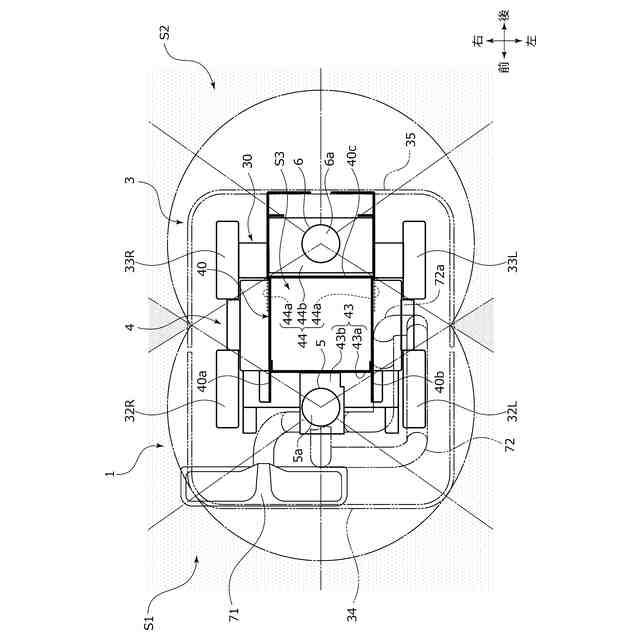
特許文献1のような掃除ロボットにおいては、走行部の前方側と後方側それぞれにおける、ノズルよりもやや上方位置に距離センサが配置されているため、走行部よりも前方側と後方側それぞれの床面近傍にある障害物を検出することが可能となっている。しかしながら、これら距離センサは、掃除機本体、パイプなどを囲繞する走行部の大型なケースの前方側と後方側に配置されていることから、ケースによって距離センサの水平方向におけるセンシング範囲が限定されてしまうという問題があった。
【0006】
本発明は、このような問題点に着目してなされたもので、水平方向におけるセンシング範囲が広い掃除ロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
前記課題を解決するために、本発明の掃除ロボットは、
吸引用モータを備え、複数の旋回キャスタにて床面を走行可能な事業用掃除機本体と、
走行用モータを備え、自律走行可能な走行台車と、
を備えた掃除ロボットであって、
前記吸引用モータの駆動に用いられる吸引用バッテリと、
前記走行用モータの駆動に用いられる走行用バッテリと、を備え、
前記吸引用バッテリは、前記走行用バッテリの上方に配置されていることを特徴としている。
前記走行台車は、前方に一対の車輪と、後方に一対の車輪を備え、
前記走行用バッテリは、前後の前記車輪の間に配置されていることを特徴としている。
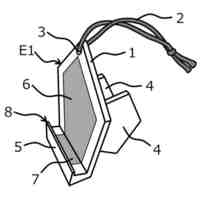
距離センサを備える自立走行可能な掃除ロボットであって、
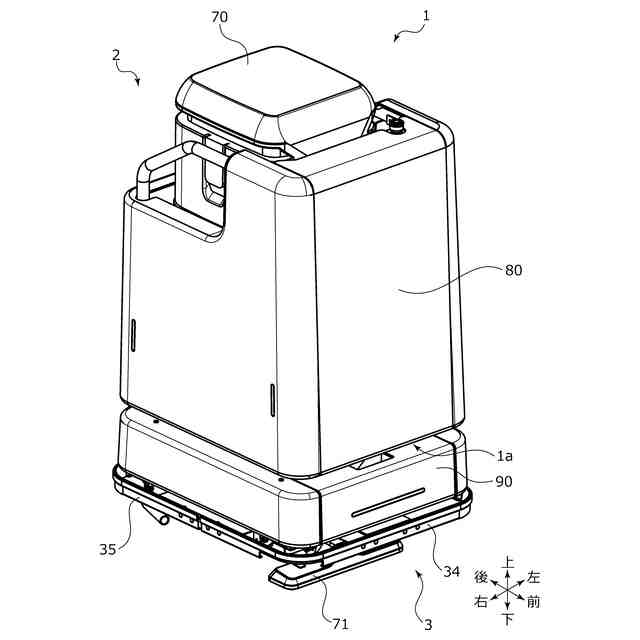
掃除機本体の機能を有する上部装置と、走行機能を有する下部装置とが立設する連結部によって連結されており、
前記距離センサは、前記連結部を挟んで複数配置されていることを特徴としている。
この特徴によれば、水平方向におけるセンシング範囲を広げることができる。
【0008】
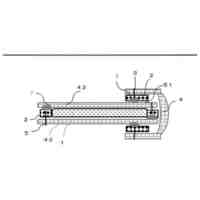
前記距離センサは、前記連結部の前方側と後方側とにそれぞれ配置されていることを特徴としている。
この特徴によれば、進退方向における距離検出における処理を簡素にすることができる。
【0009】
前記前方側の距離センサは、前記後方側の距離センサよりも奥まって配置されていることを特徴としている。
この特徴によれば、前方の進行方向における下部装置近傍を確実にセンシング範囲に含めることができる。
【0010】
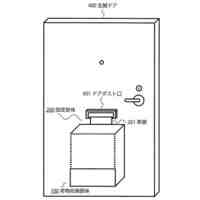
前記下部装置の前端部に、床面に対向配置され床面の塵埃を吸引するノズルが配置されていることを特徴としている。
この特徴によれば、ノズルの近傍を確実にセンシング範囲に含めることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
枕
3か月前
個人
椅子
1か月前
個人
構造体
9か月前
個人
収納体
10か月前
個人
モップ
7か月前
個人
焼き網
24日前
個人
棚の支柱
7か月前
個人
ふさかけ
8か月前
個人
絵馬守り
8か月前
個人
快眠用具
10か月前
個人
調理道具
6か月前
個人
しゃもじ
9か月前
個人
スプーン
3か月前
個人
泡立て器
6か月前
個人
棚
6か月前
個人
商品トレー
3か月前
個人
皮引き俎板
2か月前
個人
健康学習台
5か月前
個人
手動挟持具
6か月前
個人
折り畳み台
6か月前
個人
絵馬
2か月前
個人
寝具補助具
3か月前
個人
食器皿セット
3か月前
個人
アルミトレー
2か月前
個人
宅配ボックス
2か月前
個人
便座の取っ手
9か月前
個人
コップの取手
2か月前
個人
カバー
10か月前
個人
穀類保存容器
9か月前
個人
棒状ハンガー
9か月前
個人
包丁安全器具
10か月前
個人
表面処理装置
8か月前
個人
焚火台
8か月前
個人
転倒防止装置
3か月前
個人
調理用具用蓋
6か月前
個人
加熱調理器具
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ