TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024071967
公報種別
公開特許公報(A)
公開日
2024-05-27
出願番号
2022182514
出願日
2022-11-15
発明の名称
標識検出システム、自律移動ロボット制御システム
出願人
THK株式会社
代理人
個人
,
個人
,
個人
主分類
G06K
7/14 20060101AFI20240520BHJP(計算;計数)
要約
【課題】場所によってソフトウェア上の設定を変えることなく、標識の誤検出を抑制できる標識検出システム、自律移動ロボット制御システムを提供する。
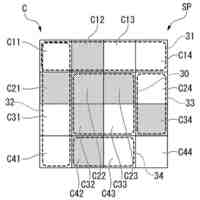
【解決手段】標識検出システムは、複数のセル(セルC11,C12…)が二次元平面上に配置されたサインポストSPと、サインポストSPを検出する画像処理装置と、を備え、サインポストSPは、識別情報を含むID表現部30と、識別情報に紐づいた第1追加符号部33及び第2追加符号部34(誤検出チェックパターン)と、を有し、画像処理装置は、サインポストSPのID表現部30から検出した識別情報に基づき、第1追加符号部33及び第2追加符号部34を検出し、サインポストSPの誤検出の有無を判断する。
【選択図】図3
特許請求の範囲
【請求項1】
複数のセルが二次元平面上に配置された標識と、
前記標識を検出する画像処理装置と、を備え、
前記標識は、
識別情報を含む識別パターンと、
前記識別情報に紐づいた誤検出チェックパターンと、を有し、
前記画像処理装置は、前記標識の前記識別パターンから検出した前記識別情報に基づき、前記誤検出チェックパターンを検出し、前記標識の誤検出の有無を判断する、
標識検出システム。
続きを表示(約 1,100 文字)
【請求項2】
前記識別情報は、識別番号を含み、
前記誤検出チェックパターンは、
前記識別番号が偶数の場合、第1パターンで形成され、
前記識別番号が奇数の場合、前記第1パターンと異なる第2パターンで形成される、
請求項1に記載の標識検出システム。
【請求項3】
前記識別情報は、識別番号を含み、
前記誤検出チェックパターンは、
前記識別番号が所定数未満の場合、第3パターンで形成され、
前記識別番号が前記所定数以上の場合、前記第3パターンと異なる第4パターンで形成される、
請求項1に記載の標識検出システム。
【請求項4】
前記標識は、前記誤検出チェックパターンとして、第1誤検出チェックパターンと、第2誤検出チェックパターンと、を有し、
前記画像処理装置は、
前記識別情報に基づき、前記第1誤検出チェックパターンを検出し、前記標識の誤検出の有無を判断する第1チェックと、
前記第1チェックの後、前記識別情報に基づき、前記第2誤検出チェックパターンを検出し、前記標識の誤検出の有無を判断する第2チェックと、を行う、
請求項1に記載の標識検出システム。
【請求項5】
前記識別情報は、識別番号を含み、
前記第1誤検出チェックパターンは、
前記識別番号が偶数の場合、第1パターンで形成され、
前記識別番号が奇数の場合、前記第1パターンと異なる第2パターンで形成され、
前記第2誤検出チェックパターンは、
前記識別番号が所定数以下の場合、第3パターンで形成され、
前記識別番号が前記所定数未満の場合、前記第3パターンと異なる第4パターンで形成される、
請求項4に記載の標識検出システム。
【請求項6】
前記誤検出チェックパターンは、所定方向に隣接する複数の前記セルによって形成される、
請求項1~5のいずれか一項に記載の標識検出システム。
【請求項7】
複数のセルが二次元平面上に配置された標識と、
前記標識に誘導されて移動する自律移動ロボットと、を備え、
前記標識は、
識別情報を含む識別パターンと、
前記識別情報に紐づいた誤検出チェックパターンと、を有し、
前記自律移動ロボットは、
前記標識を撮像する撮像装置と、
前記撮像装置が撮像した画像データを画像処理し、前記標識の前記識別パターンを検出すると共に、前記識別情報に基づき、前記標識の前記誤検出チェックパターンを検出し、前記標識の誤検出の有無を判断する画像処理装置と、を備える、
自律移動ロボット制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、標識検出システム、自律移動ロボット制御システムに関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
下記特許文献1には、ロボット等の移動体の位置検出の基準となる位置検出用ランドマーク、及び、該位置検出用ランドマークを使用した移動体の位置検出方法が開示されている。位置検出用ランドマークは、縦方向及び横方向それぞれに複数の小領域を有し、複数の該小領域における再帰反射材の有無のパターンをマーク毎に異ならせることで、多数のマークを識別できる識別番号をマークに付与している。
【先行技術文献】
【特許文献】
【0003】
特許第6606471号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、標識(上記マーク)を屋外環境等に設置し、例えば、自律移動ロボットを工場の間で移動させる場合、標識以外の野外設置物や太陽光の反射等の外乱の影響を受けて、自律移動ロボットが標識を誤検出してしまう場合がある。この場合、例えば、標識を縦方向若しくは横方向に2枚並べ、パターンを複雑化させ、標識の誤検出を防止することが考えられる。しかしながら、この場合、野外環境等では標識を2枚(複数枚)とも検出する等のソフトウェア上の設定をしなければならず、自律移動ロボットを動かすための事前設定作業が煩雑になるという問題がある。
【0005】
本発明は、上記課題に鑑みてなされたものであり、場所によってソフトウェア上の設定を変えることなく、標識の誤検出を抑制できる標識検出システム、自律移動ロボット制御システムの提供を目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明の標識検出システムは、複数のセルが二次元平面上に配置された標識と、前記標識を検出する画像処理装置と、を備え、前記標識は、識別情報を含む識別パターンと、前記識別情報に紐づいた誤検出チェックパターンと、を有し、前記画像処理装置は、前記標識の前記識別パターンから検出した前記識別情報に基づき、前記誤検出チェックパターンを検出し、前記標識の誤検出の有無を判断する。
【0007】
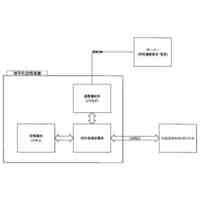
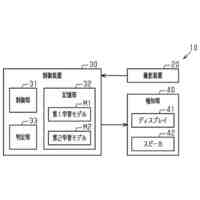
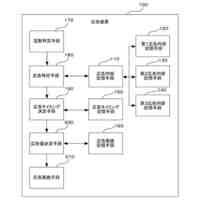
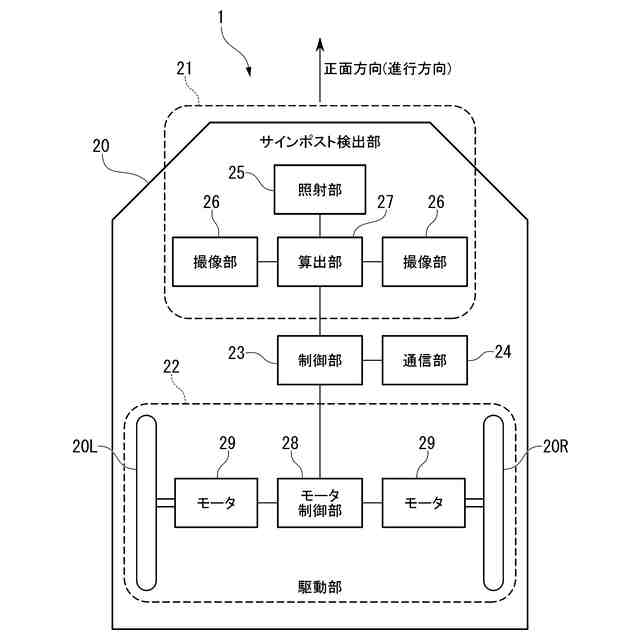
また、本発明の自律移動ロボット制御システムは、複数のセルが二次元平面上に配置された標識と、前記標識に誘導されて移動する自律移動ロボットと、を備え、前記標識は、識別情報を含む識別パターンと、前記識別情報に紐づいた誤検出チェックパターンと、を有し、前記自律移動ロボットは、前記標識を撮像する撮像装置と、前記撮像装置が撮像した画像データを画像処理し、前記標識の前記識別パターンを検出すると共に、前記識別情報に基づき、前記標識の前記誤検出チェックパターンを検出し、前記標識の誤検出の有無を判断する画像処理装置と、を備える。
【発明の効果】
【0008】
本発明によれば、場所によってソフトウェア上の設定を変えることなく、標識の誤検出を抑制できる。
【図面の簡単な説明】
【0009】
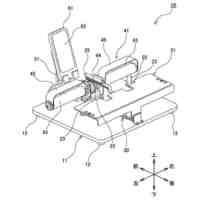
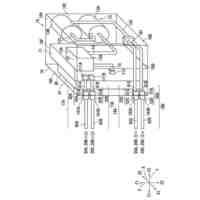
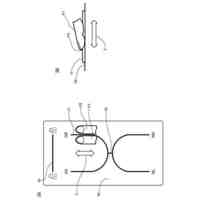
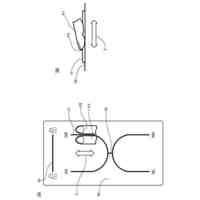
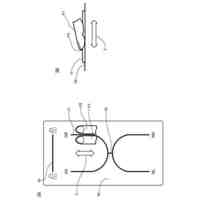
本発明の第1実施形態における自律移動ロボット制御システムを示す平面図である。
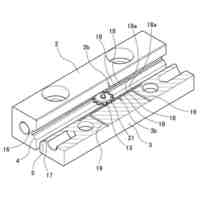
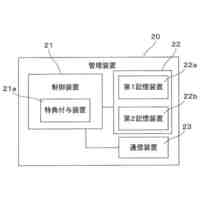
本発明の第1実施形態における自律移動ロボットの構成を示すブロック図である。
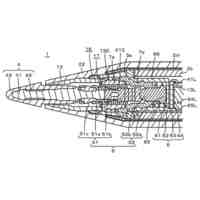
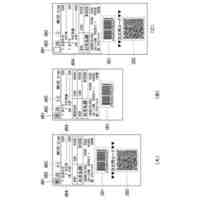
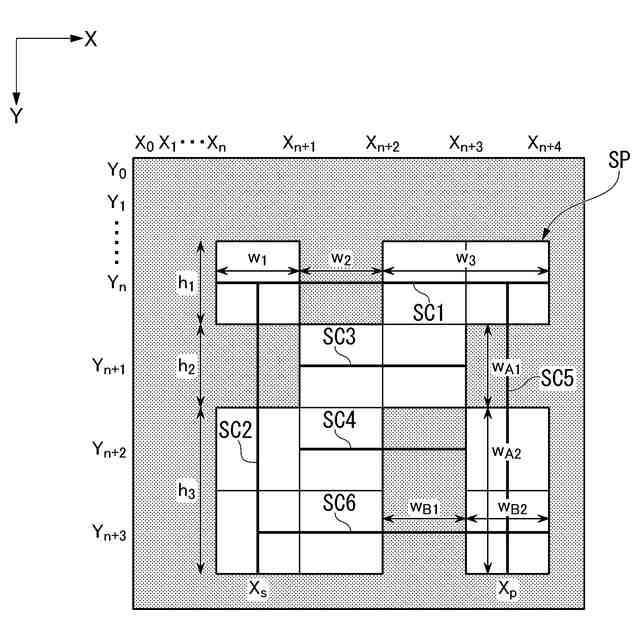
本発明の第1実施形態におけるサインポスト検出部が読み取るサインポストの被検出部の一例を示す正面図である。
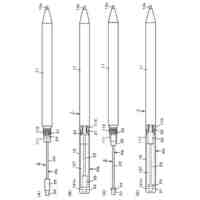
本発明の第1実施形態におけるサインポストの識別番号ID0~ID7(所定値未満)の各パターンを示す正面図である。
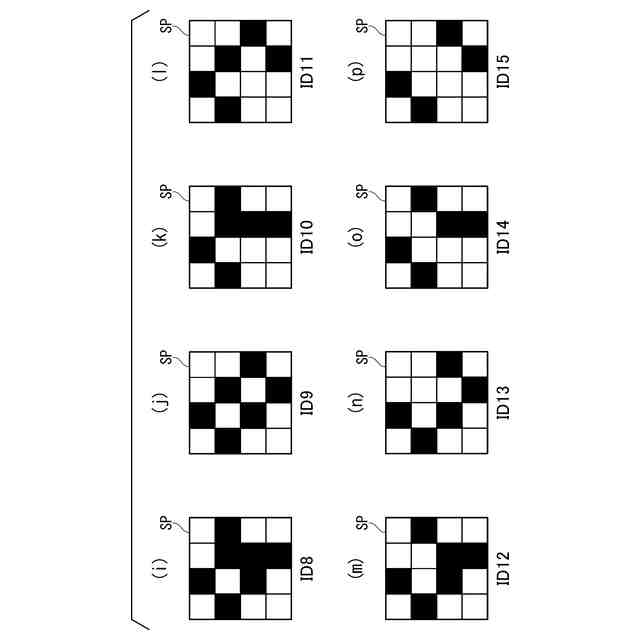
本発明の第1実施形態におけるサインポストの識別番号ID8~ID15(所定値以上)の各パターンを示す正面図である。
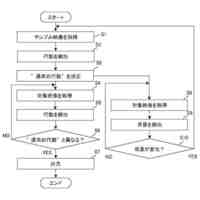
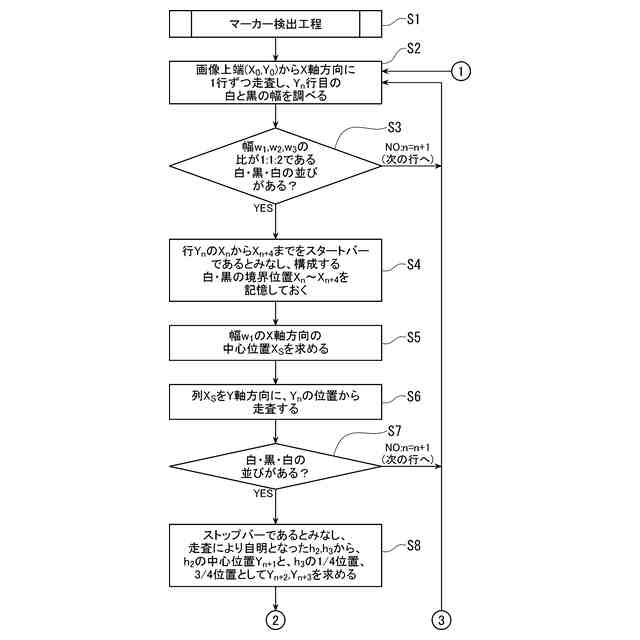
本発明の第1実施形態における自律移動ロボット制御システムの画像処理を示すフロー図である。
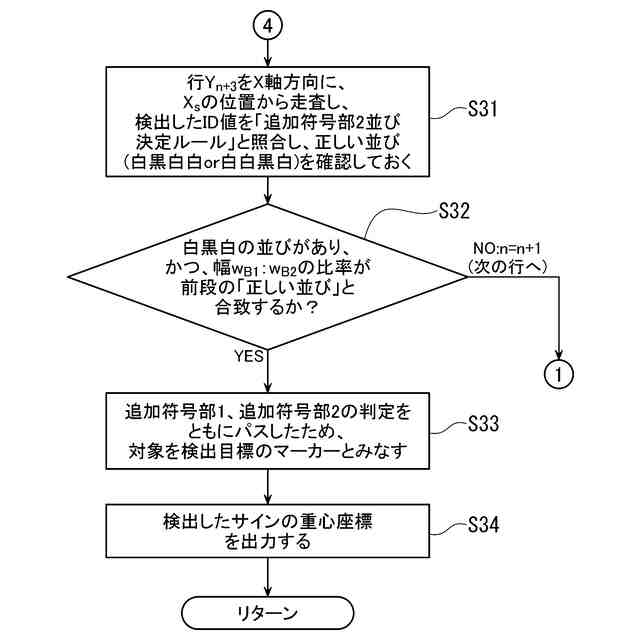
本発明の第1実施形態における自律移動ロボット制御システムの画像処理を示すフロー図である。
本発明の第1実施形態における自律移動ロボット制御システムの画像処理を示すフロー図である。
本発明の第1実施形態におけるサインポストを撮像した撮像画像を示すイメージ図である。
本発明の第2実施形態におけるサインポスト検出部が読み取るサインポストの被検出部の一例を示す正面図である。
本発明の第2実施形態におけるサインポストSPの識別番号ID0~ID7(所定値未満)の各パターンを示す正面図である。
本発明の第2実施形態におけるサインポストSPの識別番号ID8~ID15(所定値以上)の各パターンを示す正面図である。
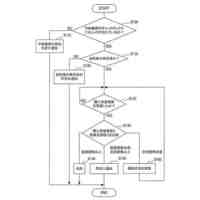
本発明の第2実施形態における自律移動ロボット制御システムの画像処理を示すフロー図である。
本発明の第2実施形態における自律移動ロボット制御システムの画像処理を示すフロー図である。
本発明の第2実施形態における自律移動ロボット制御システムの画像処理を示すフロー図である。
本発明の第2実施形態におけるサインポストを撮像した撮像画像を示すイメージ図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を参照して説明する。以下の説明では、本発明の標識検出システムを、自律移動ロボット制御システムに適用した形態を例示する。なお、本発明の標識検出システムは、自律移動ロボット制御システム以外にも適用することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
THK株式会社
手指運動支援装置
1か月前
THK株式会社
直動案内装置、駆動装置
13日前
THK株式会社
標識検出システム、自律移動ロボット制御システム
1か月前
個人
プロジェクター
1か月前
個人
暗号化記憶媒体
1か月前
個人
環境情報処理装置
6日前
個人
外食予約システム
6日前
個人
求人支援システム
23日前
キヤノン電子株式会社
周辺機器
1か月前
個人
海外在住支援システム
6日前
ニデック株式会社
冷却装置
今日
個人
求人マッチングサーバ
1か月前
カゴメ株式会社
営農支援プログラム
1か月前
カゴメ株式会社
営農支援プログラム
1か月前
カゴメ株式会社
営農支援プログラム
1か月前
カゴメ株式会社
営農支援プログラム
1か月前
株式会社ワコム
電子ペン
1か月前
株式会社ワコム
電子ペン
1か月前
シャープ株式会社
情報出力装置
21日前
アスエネ株式会社
水管理の方法
1か月前
株式会社ワコム
電子ペン
9日前
東洋電装株式会社
操作装置
9日前
CKD株式会社
遠隔支援システム
1か月前
東洋電装株式会社
操作装置
9日前
東洋電装株式会社
操作装置
9日前
株式会社寺岡精工
システム
1か月前
大日本印刷株式会社
作業台
1か月前
日本信号株式会社
料金精算システム
19日前
個人
ポイント増量アプリ「太陽光銭サー」
1か月前
トヨタ紡織株式会社
検査装置
1か月前
株式会社カロニマ
情報発信システム
13日前
株式会社小野測器
移動量計測システム
1か月前
BH株式会社
商品販売システム
1か月前
株式会社アジラ
異常行動検出システム
1か月前
シーアンドアールエム株式会社
広告装置
16日前
個人
AI営業システム
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ