TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024058500
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022165912
出願日
2022-10-14
発明の名称
管理装置、管理方法及び管理プログラム
出願人
エヌ・ティ・ティ・コミュニケーションズ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/43 20240101AFI20240418BHJP(制御;調整)
要約
【課題】イベント発生時または発生が予測される場合における自律走行型ロボットの迅速な走行ルートの変更を支援することができる。
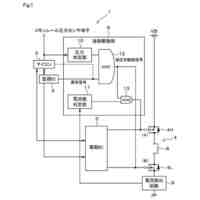
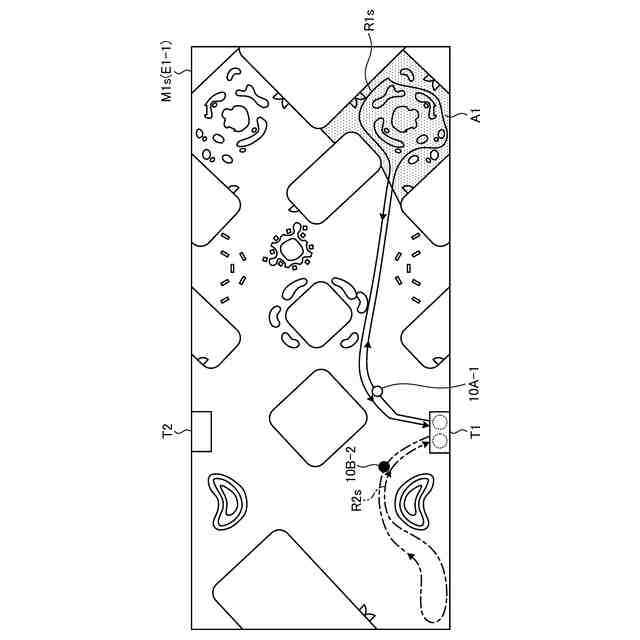
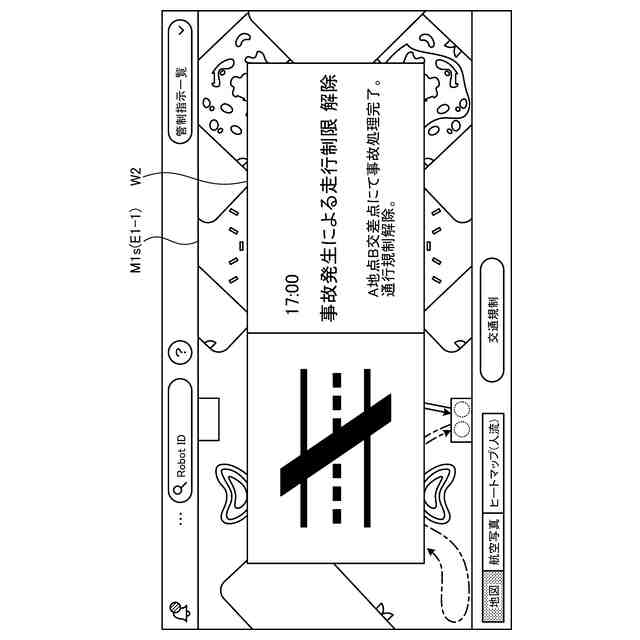
【解決手段】管理サーバ30は、外部情報を収集する情報収集部333と、自律走行するロボットを制御する制御サーバから、ロボットの現在位置または走行ルートを受信する取得部と、外部情報を基に、イベントの発生と該イベントが発生するイベント発生エリアを検知するイベント発生検知部334と、ロボットの現在位置または走行ルートを基に、イベント発生エリアに位置する、または位置すると予測されるロボットを特定する対象ロボット特定部335と、収集した外部情報とマップ情報とを基に、イベント発生エリアに位置する、または位置すると予測されるロボットごとに、新規走行ルートを判定する新規走行ルート判定部336と、新規走行ルートを端末装置にレコメンドする新規走行ルートレコメンド部337とを有する。
【選択図】図4
特許請求の範囲
【請求項1】
屋外及び屋内を自律走行するロボットが走行する各エリアのマップ情報を記憶する記憶部と、
外部情報を収集する収集部と、
前記ロボットを制御する制御装置から、前記ロボットの現在位置または前記ロボットの走行ルートを受信する取得部と、
前記外部情報を基に、イベントの発生と該イベントの発生するイベント発生エリアを検知する検知部と、
前記ロボットの現在位置または前記ロボットの走行ルートを基に、前記イベント発生エリアに位置する前記ロボット、または前記イベント発生エリアに位置すると予測される前記ロボットを特定する特定部と、
前記外部情報と前記マップ情報とを基に、前記イベント発生エリアに位置する前記ロボット、または前記イベント発生エリアに位置すると予測される前記ロボットごとに、新規走行ルートに関する情報を判定する判定部と、
前記新規走行ルートに関する情報を端末装置にレコメンドするレコメンド部と、
を有することを特徴とする管理装置。
続きを表示(約 1,300 文字)
【請求項2】
前記特定部は、前記ロボットが前記走行ルートに関する情報を保持しない場合には、前記現在位置に基づき、前記イベント発生エリアに位置する前記ロボットを特定し、
前記ロボットが前記走行ルートに関する情報を保持する場合には、前記イベント発生エリアに含まれる前記走行ルートを保持する前記ロボットを特定することを特徴とする請求項1に記載の管理装置。
【請求項3】
前記外部情報は、前記各エリアにおける災害に関する情報と、前記ロボットが取得する情報と、人流に関する情報と、気象に関する情報と、交通に関する情報のいずれか1つまたは複数と、に基づくイベント発生予測結果を含み、
前記判定部は、前記イベント発生予測結果が示す前記イベントを回避する前記新規走行ルートに関する情報を判定することを特徴とする請求項1に記載の管理装置。
【請求項4】
前記判定部は、前記イベント発生エリアに位置するロボット間で異なる新規走行ルートに関する情報を判定することを特徴とする請求項1に記載の管理装置。
【請求項5】
管理装置が実行する管理方法であって、
外部情報を収集する工程と、
ロボットを制御する制御装置から、前記ロボットの現在位置または前記ロボットの走行ルートを受信する工程と、
前記外部情報を基に、イベントの発生と該イベントの発生するイベント発生エリアを検知する工程と、
前記ロボットの現在位置または前記ロボットの走行ルートを基に、前記イベント発生エリアに位置する前記ロボット、または前記イベント発生エリアに位置すると予測される前記ロボットを特定する工程と、
前記外部情報とマップ情報とを基に、前記イベント発生エリアに位置する前記ロボット、または前記イベント発生エリアに位置すると予測される前記ロボットごとに、新規走行ルートに関する情報を判定する工程と、
前記新規走行ルートに関する情報を端末装置にレコメンドする工程と、
を備えることを特徴とする管理方法。
【請求項6】
管理装置が実行する管理プログラムであって、
外部情報を収集するステップと、
ロボットを制御する制御装置から、前記ロボットの現在位置または前記ロボットの走行ルートを受信するステップと、
前記外部情報を基に、イベントの発生と該イベントの発生するイベント発生エリアを検知するステップと、
前記ロボットの現在位置または前記ロボットの走行ルートを基に、前記イベント発生エリアに位置する前記ロボット、または前記イベント発生エリアに位置すると予測される前記ロボットを特定するステップと、
前記外部情報とマップ情報とを基に、前記イベント発生エリアに位置する前記ロボット、または前記イベント発生エリアに位置すると予測される前記ロボットごとに、新規走行ルートに関する情報を判定するステップと、
前記新規走行ルートに関する情報を端末装置にレコメンドするステップと、
を備えることを特徴とする管理プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、管理装置、管理方法及び管理プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、人手不足に対応するため、自律走行型のロボットが開発されている。自律走行型のロボットは、屋内や、屋外を走行することで、物品配送、警備、案内、清掃、人の移乗等を実施する。
【0003】
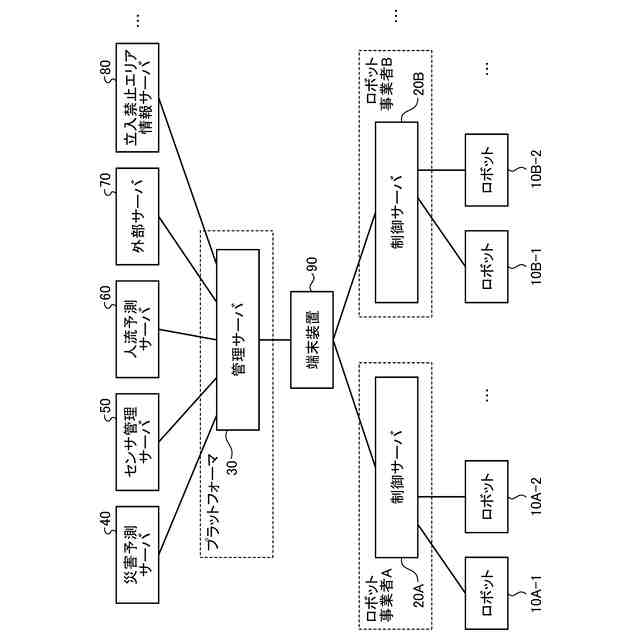
この自律走行型のロボットの走行エリアは、遠隔操作及び複数台同時制御によって、一施設の内部及び該施設周辺のエリアに限らず、複数施設間及びその周辺のエリアや、複数エリア及びそのエリア間の往来まで、拡大が検討されている。
【0004】
各ロボットは、例えば、それぞれのロボットオペレータによって、タスク及び走行ルートが設定され、ロボット事業者の制御サーバに、走行を制御されることで、自律走行を行う。
【先行技術文献】
【特許文献】
【0005】
特開2019-078618号公報
特開2019-079247号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、ロボットが走行するエリアで何らかのイベント(例えば、催事等によるエリア規制、交通規制、ゲリラ豪雨等の気象変動等、ロボットの自律走行に干渉もしくは干渉する可能性がある事象全般のことで、以降は単に「イベント」と表記)の発生時または発生が予測される場合において、各ロボットオペレータは、イベントが発生するエリアで走行する各ロボットの走行ルートの変更、走行の取りやめの判断、走行のタイミングの変更(例えば、タイミングを早めたり、遅くしたりする等)を行う必要がある。この場合、例えば、各ロボットオペレータは、外部情報等を用いてイベントに関する情報を収集し、イベント発生エリアに位置するロボットの走行ルートを新規走行ルート(発生イベントを回避するような走行ルートであり、以降は単に「新規走行ルート」と表記)に書き換えて、ロボットにイベントを回避させなくてはならない。他方で、各ロボットオペレータは、ロボットがイベント発生の影響を受けないと判断した場合には、走行ルートを変更せず、通常運行(通常の走行)を行う必要がある。
【0007】
ロボット台数及びエリア拡大に伴い、ロボットオペレータが管理するエリアやロボットの台数が増加する中、ロボットオペレータは、イベントの発生時には迅速に各ロボットの走行ルートを変更させなくてはならない。このため、イベント発生時におけるロボットオペレータの処理負担が非常に高くなり、ロボットの迅速な走行ルートの変更が難しいことも考えられる。
【0008】
本発明は、上記に鑑みてなされたものであって、イベント発生および発生予測時に、自律走行型ロボットの走行判断や走行ルートへの影響を把握することができる情報を提供することができる、管理装置、管理方法及び管理プログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するために、本発明の管理装置は、屋外及び屋内を自律走行するロボットが走行する各エリアのマップ情報を記憶する記憶部と、外部情報を収集する収集部と、前記ロボットを制御する制御装置から、前記ロボットの現在位置または前記ロボットの走行ルートを受信する取得部と、前記外部情報を基に、イベントの発生と該イベントの発生するイベント発生エリアを検知する検知部と、前記ロボットの現在位置または前記ロボットの走行ルートを基に、前記イベント発生エリアに位置する前記ロボット、または前記イベント発生エリアに位置すると予測される前記ロボットを特定する特定部と、前記外部情報と前記マップ情報とを基に、前記イベント発生エリアに位置する前記ロボット、または前記イベント発生エリアに位置すると予測される前記ロボットごとに、新規走行ルートに関する情報を判定する判定部と、前記新規走行ルートに関する情報を端末装置にレコメンドするレコメンド部と、を有することを特徴とする。
【発明の効果】
【0010】
本発明によれば、イベント発生時における自律走行型ロボットの迅速な走行ルートの変更を支援することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
流量制御装置
28日前
アズビル株式会社
電圧出力回路
1か月前
ミネベアミツミ株式会社
入力装置
19日前
株式会社エクセディ
作業ロボット
7日前
トヨタ自動車株式会社
自動走行搬送車
27日前
三菱電機株式会社
移動体制御装置
6日前
エイブリック株式会社
ボルテージレギュレータ
27日前
株式会社クボタ
故障診断装置
26日前
リックス株式会社
状態検出装置
22日前
株式会社デンソー
制御装置
1か月前
株式会社デンソー
制御装置
1か月前
日本プラスト株式会社
節度感付加装置
1か月前
岩田工機株式会社
加工装置
6日前
株式会社オリジン
電源装置
1か月前
村田機械株式会社
搬送車システム
12日前
株式会社オリジン
電源装置
1か月前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社GSユアサ
電力変換装置
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
日置電機株式会社
信号出力装置および抵抗測定装置
今日
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
株式会社ディスコ
加工装置
1か月前
東洋電装株式会社
移動検出装置および鞍乗車両
1か月前
日本精工株式会社
制御システムおよび制御方法
今日
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
村田機械株式会社
走行車システム
1か月前
日本精工株式会社
制御システムおよび制御方法
今日
日本精工株式会社
制御システムおよび制御方法
今日
日本精工株式会社
制御システムおよび制御方法
今日
愛三工業株式会社
弁システム
1か月前
株式会社デンソー
ペダル装置
1か月前
株式会社デンソー
ペダル装置
1か月前
多摩川精機株式会社
突入電流防止回路
12日前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ