TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024054599
公報種別
公開特許公報(A)
公開日
2024-04-17
出願番号
2022160921
出願日
2022-10-05
発明の名称
溶接方法及び溶接装置
出願人
鹿島建設株式会社
,
新東スマートエンジニアリング株式会社
代理人
個人
,
個人
,
個人
主分類
B23K
9/095 20060101AFI20240410BHJP(工作機械;他に分類されない金属加工)
要約
【課題】未溶接状態の開先の実測情報がない状態で当該開先の溶接を実行することが可能な溶接方法及び溶接装置を提供することを目的とする。
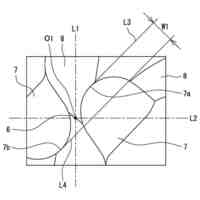
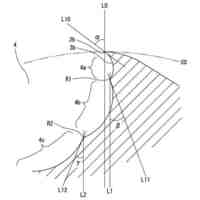
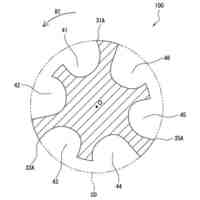
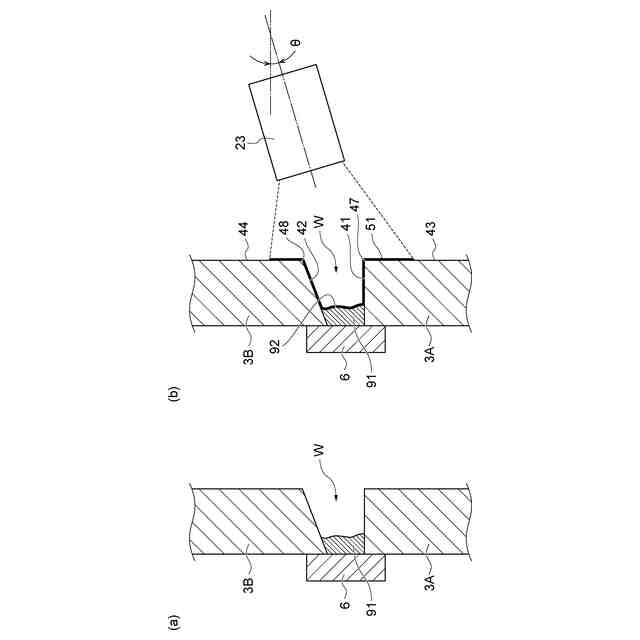
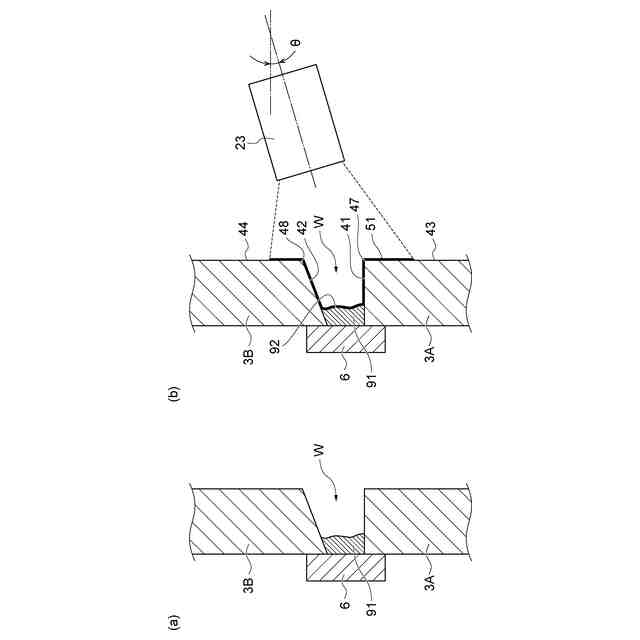
【解決手段】溶接方法は、溶接ロボット13の開先センサ23によって、開先Wのうち溶接されずに残っている残存断面55の輪郭線51を取得するセンシング工程と、輪郭線51に基づいて残存断面55の形状を推定して推定残存断面56を算出する断面推定工程と、推定残存断面56に基づいて、推定残存断面56内における狙い位置Kを設定する狙い位置設定工程と、狙い位置Kを狙って溶接ロボット13が溶接ツール21で残存断面55内に溶接ビードHを形成していく溶接工程と、を備える。断面推定工程では、未溶接状態における開先Wの断面について実測された情報を使用せずに、推定残存断面56が算出される。
【選択図】図6
特許請求の範囲
【請求項1】
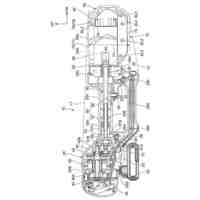
溶接用のエンドエフェクタとセンサとを有する溶接ロボットを用いて溶接対象物の開先に対して多層盛溶接を行う溶接方法であって、
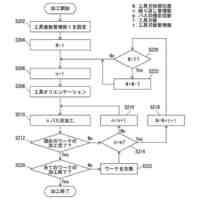
前記開先内に所定の厚さの既溶接部分が存在している状態で、前記溶接ロボットの前記センサによって前記開先近傍をセンシングし、前記開先のうち溶接されずに残っている部分の断面である残存断面の輪郭線を取得するセンシング工程と、
前記センシング工程で得られた前記輪郭線に基づいて、前記残存断面の形状を推定して推定残存断面を算出する断面推定工程と、
前記断面推定工程で得られた前記推定残存断面に基づいて、前記推定残存断面内における前記エンドエフェクタの狙い位置を設定する狙い位置設定工程と、
前記狙い位置設定工程で設定された前記狙い位置を狙って、前記溶接ロボットが前記エンドエフェクタで前記残存断面内に溶接ビードを形成していく溶接工程と、を備え、
前記断面推定工程では、
前記既溶接部分が形成される前の未溶接状態における前記開先の断面について実測された情報を使用せずに、推定残存断面が算出される、
溶接方法。
続きを表示(約 1,300 文字)
【請求項2】
前記推定残存断面は、
前記溶接対象物の表面と前記開先の内側面とが交差してなる2箇所の角部にそれぞれ対応する点A及び点Dと、2つの前記内側面上の点としてそれぞれ推定される点B及び点Cと、を頂点とする四角形ABCDであり、
前記断面推定工程では、
前記センシング工程で得られた前記輪郭線から検出される2つの変曲点がそれぞれ前記点A及び前記点Dとして定義され、
前記輪郭線のうち前記点Aを始点とする直線的な区間に沿ったベクトルALが定義され、
前記輪郭線のうち前記点Dを始点とする直線的な区間に沿ったベクトルDLが定義され、
前記既溶接部分の厚さと、前記既溶接部分が形成される前の未溶接状態の前記開先の設計上の深さと、に基づいて、前記ベクトルALの延長線上に前記点Bが定義されるとともに前記ベクトルDLの延長線上に前記点Cが定義される、
請求項1に記載の溶接方法。
【請求項3】
前記センシング工程及び前記溶接工程は、
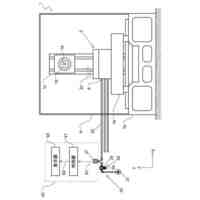
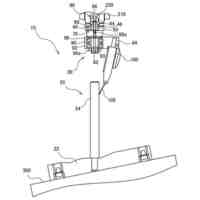
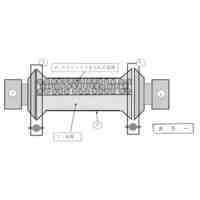
前記溶接対象物である鋼管柱の周囲に設置されたレール上に当該レール上を移動可能な前記溶接ロボットが設置された状態で行なわれる、請求項1又は2に記載の溶接方法。
【請求項4】
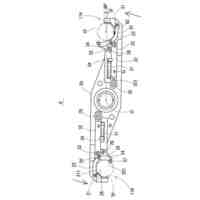
前記鋼管柱同士がエレクションピース及び建方治具を含む仮接続部を介して上下に仮接続された状態で、前記溶接ロボットを用いない溶接手法によって前記開先内に前記既溶接部分が形成される仮溶接工程と、
前記仮溶接工程の後、前記仮接続部が除去される仮接続部除去工程と、
前記仮接続部除去工程の後で且つ前記センシング工程の前に、前記鋼管柱の周囲に前記レールが設置されるとともに、当該レール上に前記溶接ロボットが設置されるロボット設置工程と、を更に備える請求項3に記載の溶接方法。
【請求項5】
溶接用のエンドエフェクタとセンサとを有する溶接ロボットと、前記溶接ロボットと前記エンドエフェクタと前記センサとを制御する制御部と、を備え溶接対象物の開先に対して多層盛溶接を行う溶接装置であって、
前記制御部は、
前記開先内に所定の厚さの既溶接部分が存在している状態で、前記溶接ロボットの前記センサに前記開先近傍をセンシングさせ、前記開先のうち溶接されずに残っている部分の断面である残存断面の輪郭線を取得するセンシング処理制御部と、
前記センシング処理制御部で得られた前記輪郭線に基づいて、前記残存断面の形状を推定して推定残存断面を算出する断面推定部と、
前記断面推定部で得られた前記推定残存断面に基づいて、前記推定残存断面内における前記エンドエフェクタの狙い位置を設定する狙い位置設定部と、
前記狙い位置設定部で設定された前記狙い位置を狙って、前記溶接ロボットに前記エンドエフェクタで前記残存断面内に溶接ビードを形成させる溶接処理制御部と、を備え、
前記断面推定部は、
前記既溶接部分が形成される前の未溶接状態における前記開先の断面について実測された情報を使用せずに、推定残存断面を算出する、
溶接装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、溶接方法及び溶接装置に関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、このような分野の技術として、下記特許文献1に記載の溶接方法が知られている。この溶接方法は、溶接ロボットの開先センサによって開先の情報が取得され、取得した開先情報に基づいて開先に対する複数の溶接パスが計画される。その後、計画に基づいて溶接ロボットの溶接ツールによる溶接処理が繰り返し実行されて開先の溶接が進行する。溶接ロボットは、上記溶接処理を行ないながら開先センサによって開先の情報を取得し、溶接ツールの位置を調整する。
【先行技術文献】
【特許文献】
【0003】
特開2022-28522号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記溶接方法は、開先が未溶接の状態から溶接を開始することが前提とされている。しかしながら、この種の溶接方法においては、途中までの開先の溶接が既になされている状態から溶接を開始することが望まれる状況もあり、このとき未溶接状態における開先情報が存在するとは限らない。本発明は、未溶接状態の開先の実測情報がない状態で当該開先の溶接を実行することが可能な溶接方法及び溶接装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の要旨は以下の通りである。
【0006】
〔1〕溶接用のエンドエフェクタとセンサとを有する溶接ロボットを用いて溶接対象物の開先に対して多層盛溶接を行う溶接方法であって、前記開先内に所定の厚さの既溶接部分が存在している状態で、前記溶接ロボットの前記センサによって前記開先近傍をセンシングし、前記開先のうち溶接されずに残っている部分の断面である残存断面の輪郭線を取得するセンシング工程と、前記センシング工程で得られた前記輪郭線に基づいて、前記残存断面の形状を推定して推定残存断面を算出する断面推定工程と、前記断面推定工程で得られた前記推定残存断面に基づいて、前記推定残存断面内における前記エンドエフェクタの狙い位置を設定する狙い位置設定工程と、前記狙い位置設定工程で設定された前記狙い位置を狙って、前記溶接ロボットが前記エンドエフェクタで前記残存断面内に溶接ビードを形成していく溶接工程と、を備え、前記断面推定工程では、前記既溶接部分が形成される前の未溶接状態における前記開先の断面について実測された情報を使用せずに、推定残存断面が算出される、溶接方法。
【0007】
〔2〕前記推定残存断面は、前記溶接対象物の表面と前記開先の内側面とが交差してなる2箇所の角部にそれぞれ対応する点A及び点Dと、2つの前記内側面上の点としてそれぞれ推定される点B及び点Cと、を頂点とする四角形ABCDであり、前記断面推定工程では、前記センシング工程で得られた前記輪郭線から検出される2つの変曲点がそれぞれ前記点A及び前記点Dとして定義され、前記輪郭線のうち前記点Aを始点とする直線的な輪郭部に沿ったベクトルALが定義され、前記輪郭線のうち前記点Dを始点とする直線的な輪郭部に沿ったベクトルDLが定義され、前記既溶接部分の厚さと、前記既溶接部分が形成される前の未溶接状態の前記開先の設計上の深さと、に基づいて、前記ベクトルALの延長線上に前記点Bが定義されるとともに前記ベクトルDLの延長線上に前記点Cが定義される、〔1〕に記載の溶接方法。
【0008】
〔3〕前記センシング工程及び前記溶接工程は、前記溶接対象物である鋼管柱の周囲に設置されたレール上に当該レール上を移動可能な前記溶接ロボットが設置された状態で行なわれる、〔1〕又は〔2〕に記載の溶接方法。
【0009】
〔4〕前記鋼管柱同士がエレクションピース及び建方治具を含む仮接続部を介して上下に仮接続された状態で、前記溶接ロボットを用いない溶接手法によって前記開先内に前記既溶接部分が形成される仮溶接工程と、前記仮溶接工程の後、前記仮接続部が除去される仮接続部除去工程と、前記仮接続部除去工程の後で且つ前記センシング工程の前に、前記鋼管柱の周囲に前記レールが設置されるとともに、当該レール上に前記溶接ロボットが設置されるロボット設置工程と、を更に備える〔1〕~〔3〕の何れか1項に記載の溶接方法。
【0010】
〔5〕溶接用のエンドエフェクタとセンサとを有する溶接ロボットと、前記溶接ロボットと前記エンドエフェクタと前記センサとを制御する制御部と、を備え溶接対象物の開先に対して多層盛溶接を行う溶接装置であって、前記制御部は、前記開先内に所定の厚さの既溶接部分が存在している状態で、前記溶接ロボットの前記センサに前記開先近傍をセンシングさせ、前記開先のうち溶接されずに残っている部分の断面である残存断面の輪郭線を取得するセンシング処理制御部と、前記センシング処理制御部で得られた前記輪郭線に基づいて、前記残存断面の形状を推定して推定残存断面を算出する断面推定部と、前記断面推定部で得られた前記推定残存断面に基づいて、前記推定残存断面内における前記エンドエフェクタの狙い位置を設定する狙い位置設定部と、前記狙い位置設定部で設定された前記狙い位置を狙って、前記溶接ロボットに前記エンドエフェクタで前記残存断面内に溶接ビードを形成させる溶接処理制御部と、を備え、前記断面推定部は、前記既溶接部分が形成される前の未溶接状態における前記開先の断面について実測された情報を使用せずに、推定残存断面を算出する、溶接装置。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
ねじ締め機
21日前
個人
低周波振動発生出力方法
1か月前
日東精工株式会社
ねじ締め機
2日前
日東精工株式会社
ねじ締め機
3か月前
津田駒工業株式会社
工作機械
1か月前
個人
パワーデバイスの接合方法
3か月前
日東精工株式会社
ねじ締め装置
2か月前
日東精工株式会社
着座確認装置
2か月前
アズビル株式会社
溶接方法
1か月前
株式会社FUJI
工作機械
1か月前
ウエダ産業株式会社
カッター装置
1か月前
株式会社コスメック
クランプ装置
2か月前
株式会社コスメック
着脱装置
14日前
株式会社不二越
ドリル
1か月前
株式会社ダイヘン
アーク溶接制御方法
1か月前
株式会社ダイヘン
くびれ検出制御方法
16日前
株式会社ダイヘン
アーク溶接制御方法
16日前
津田駒工業株式会社
回転テーブル装置
3か月前
株式会社不二越
エンドミル
2か月前
個人
クーラント装置
2か月前
一文機工株式会社
スタッド溶接用プラグ
3か月前
株式会社不二越
管用タップ
1か月前
株式会社FUJI
工具交換アーム
3か月前
株式会社不二越
管用タップ
9日前
株式会社不二越
複合加工機
3か月前
株式会社小島半田製造所
はんだ線
1か月前
株式会社ダイヘン
正逆送給アーク溶接方法
2か月前
有限会社 ナプラ
接合材用金属粒子
24日前
株式会社永木精機
埋設管窓開け工具
29日前
株式会社不二越
歯車加工装置
1か月前
株式会社FUJI
コレットチャック
3か月前
ダイハツ工業株式会社
位置検出装置
1か月前
工機ホールディングス株式会社
工具
1か月前
株式会社ダイヘン
被覆アーク溶接制御方法
2日前
株式会社不二越
歯車製造装置
2か月前
株式会社NMC
水溶性切削液用フィルター
3か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ