TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024022040
公報種別
公開特許公報(A)
公開日
2024-02-16
出願番号
2022125341
出願日
2022-08-05
発明の名称
ねじ締め装置
出願人
日東精工株式会社
代理人
主分類
B23P
19/06 20060101AFI20240208BHJP(工作機械;他に分類されない金属加工)
要約
【課題】本発明は、変位センサを用いずにねじ浮き判定可能なねじ締め装置なねじ締め装置を提供する。
【解決手段】
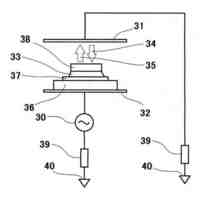
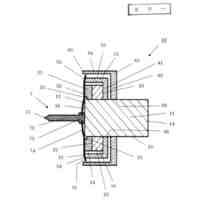
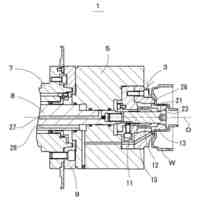
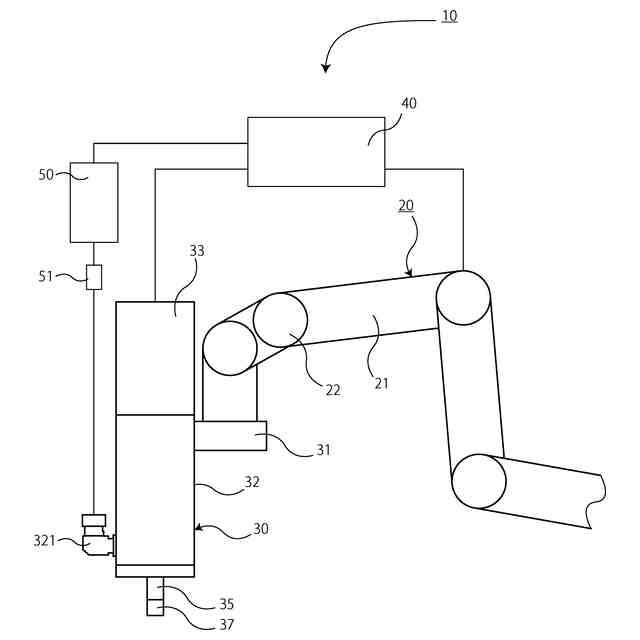
ねじSの頭部を吸引保持可能な締結工具37を回転駆動させる回転駆動源33を有し、前記締結工具37を前記回転駆動源33に対して軸線方向に相対的に移動可能に構成されているドライバユニット30と、前記締結工具37の内圧を測定する圧力センサ51と、前記ドライバユニットを移動させる位置制御機構20と、前記ドライバユニット30および前記位置制御機構20の駆動を制御する制御部40とを備え、前記制御部40は、前記締結工具37の内圧の変化およびドライバユニット30の位置に基づいてねじが着座しているか否かを判定することを特徴とするねじ締め装置10による。
【選択図】図2
特許請求の範囲
【請求項1】
ねじの頭部を吸引保持可能な締結工具を回転駆動させる回転駆動源を有し、前記締結工具を前記回転駆動源に対して軸線方向に相対的に移動可能に構成されているドライバユニットと、
前記締結工具の内圧を測定する圧力センサと、
前記ドライバユニットを移動させる位置制御機構と、
前記ドライバユニットおよび前記位置制御機構の駆動を制御する制御部とを備え、
前記制御部は、前記締結工具の内圧の変化およびドライバユニットの位置に基づいてねじが着座しているか否かを判定することを特徴とするねじ締め装置。
続きを表示(約 510 文字)
【請求項2】
前記制御部は、前記ドライバユニットが所定の負圧解除位置に達した際に前記締結工具内部の負圧が解除されているか否かによってねじが着座しているか否かを判定していることを特徴とする請求項1に記載のねじ締め装置。
【請求項3】
前記制御部は、前記締結工具の内圧が変化した際に前記ドライバユニットが負圧解除位置に達しているか否かによってねじが着座しているか否かを判定していることを特徴とする請求項1に記載のねじ締め装置。
【請求項4】
前記締結工具がねじの頭部と嵌合可能なボックスビットであることを特徴とする請求項1ないし請求項3の何れかに記載のねじ締め装置。
【請求項5】
前記締結工具がねじの頭部に形成された駆動穴と嵌合可能なドライバビットおよび当該ドライバビットを回転自在かつ軸方向相対移動可能に内包するとともに、ねじの頭部を吸引保持するスクリューガイドとからなることを特徴とする請求項1ないし請求項3の何れかに記載のねじ締め装置。
【請求項6】
前記スクリューガイドが回転自在に構成されていることを特徴とする請求項5に記載のねじ締め装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ねじをワークに締め付けるねじ締め装置に関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
従来、ねじをワークに締め付けるねじ締め装置として、特許文献1に開示するものが知られている。このねじ締め装置は、ねじと嵌合するドライバビットと、このドライバビットを内包するスクリューガイドと、スクリューガイドとドライバビットとの相対位置を検出可能な変位センサを備えている。このように変位センサを備えたねじ締めは、ねじ締結完了時、ワーク表面に当接させたスクリューガイドとねじの頭部と嵌合するドライバビットとの相対位置からワーク表面に対するねじの頭部の相対位置を算出可能となる。このようにワーク表面を基準としたねじの頭部の位置を算出することにより、締結時に付加されるねじ締め推力やドライバユニットの自重に起因したワークの撓みによる締結位置の変動に影響されることなくねじがワークに着座しているか否かを判定可能となる。
【先行技術文献】
【特許文献】
【0003】
特開昭55-096277公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のねじ締め装置は、上述のようにスクリューガイドとドライバビットとの相対位置を検出可能な変位センサが必要であり、変位センサの分装置が高額になる等の問題があった。また、上述のねじ浮き判定は、スクリューガイドを用いないねじ締め装置には適用できず、例えば、ボックスビットでねじを締付けるねじ締め装置には、ねじ浮き判定できないという問題等もあった。
【0005】
そのため、本発明は、スクリューガイドとドライバビットとの相対位置を検出する変位センサを用いずにねじ浮き判定可能なねじ締め装置の提供を目的とする。
【課題を解決するための手段】
【0006】
この目的を達成するために本発明は、ねじの頭部を吸引保持可能な締結工具を回転駆動させる回転駆動源を有し、前記締結工具を前記回転駆動源に対して軸線方向に相対的に移動可能に構成されているドライバユニットと、前記締結工具の内圧を測定する圧力センサと、前記ドライバユニットを移動させる位置制御機構と、前記ドライバユニットおよび前記位置制御機構の駆動を制御する制御部とを備え、前記制御部は、前記締結工具の内圧の変化およびドライバユニットの位置に基づいてねじが着座しているか否かを判定することを特徴とする。なお、前記制御部は、前記ドライバユニットが所定の負圧解除位置に達した際に前記締結工具内部の負圧が解除されているか否かによってねじが着座しているか否かを判定している、あるいは前記締結工具の内圧が変化した際に前記ドライバユニットが負圧解除位置に達しているか否かによってねじが着座しているか否かを判定することがしていることが好ましい。また、前記締結工具がねじの頭部と嵌合可能なボックスビットであることが好ましい。さらに、前記締結工具がねじの頭部に形成された駆動穴と嵌合可能なドライバビットおよび当該ドライバビットを回転自在かつ軸方向相対移動可能に内包するとともに、ねじの頭部を吸引保持するスクリューガイドとからなることが好ましい。しかも、前記スクリューガイドが回転自在に構成されていることが好ましい。
【発明の効果】
【0007】
上記発明によれば、前記締結工具の内圧の変化と、ドライバユニットの位置を基にねじ浮きを判定するため、スクリューガイドとドライバビットとの相対位置を検出する変位センサが不要となる。このため、装置が安価になるとともに変位センサを保持する部品等が必要無くねじ締め装置を軽量化できる等の利点がある。また、負圧発生手段でねじを吸着保持するねじ締め装置であれば、ボックスビットでねじを締付けるものであってもねじ浮き判定可能であるという利点もある。なお、ドライバユニットが負圧解除位置に達した際の締結工具の内圧からねじ浮き判定を行う場合、所定の負圧解除位置まで即座に移動させることができ、サイクルタイムが向上する等の利点も有する。一方、締結工具内部の圧力が変化した際のドライバユニットの位置からねじ浮き判定を行う場合、圧力変化した際の位置からねじ浮きしている寸法を算出可能等の利点も有する。さらに、前記締結工具がねじの頭部と嵌合可能なボックスビットである場合、ねじの頭部がボックスビットの通気穴を密閉でき、締結工具内部の負圧に維持できる。一方、ねじの頭部と当接可能なスクリューガイドが有している場合も同様にねじの頭部がスクリューガイドの下端開口部を密閉できるため、締結工具内部の負圧に維持できる。このようにねじによって締結工具が密閉されていることで、締結工具とねじとが離れた際の気圧変化が大きくなり、気圧圧力センサがねじと締結工具との離脱を検出し易くなる等の利点を有する。さらにスクリューガイドが回転可能であれば、ねじとスクリューガイドとが破損し難い等の利点も有する。
【図面の簡単な説明】
【0008】
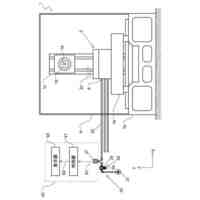
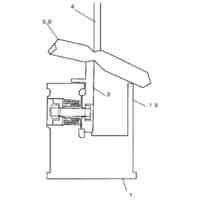
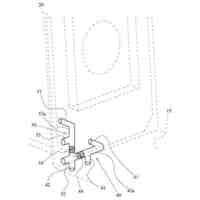
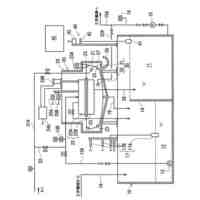
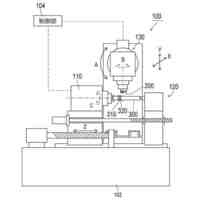
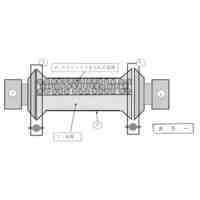
本発明に係るねじ締め装置の構造を示す側面図である。
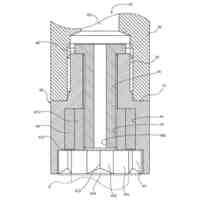
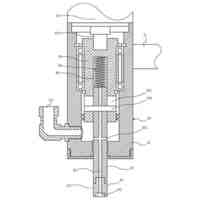
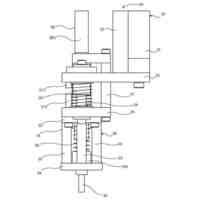
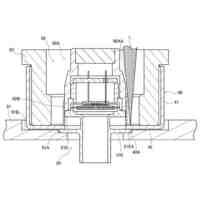
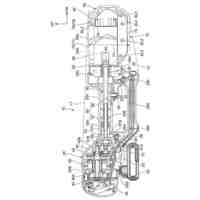
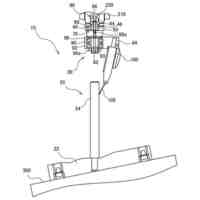
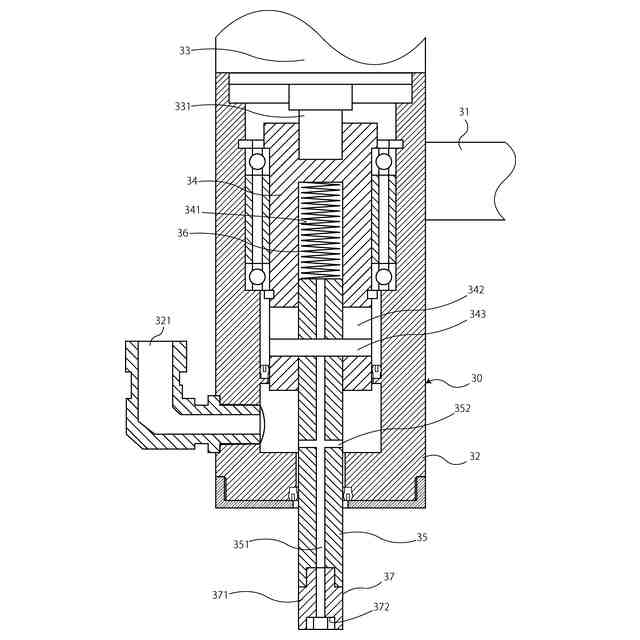
本発明に係るねじ締め装置のドライバユニットの構造を示す要部拡大一部切欠き断面側面図である。
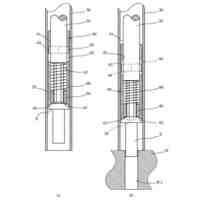
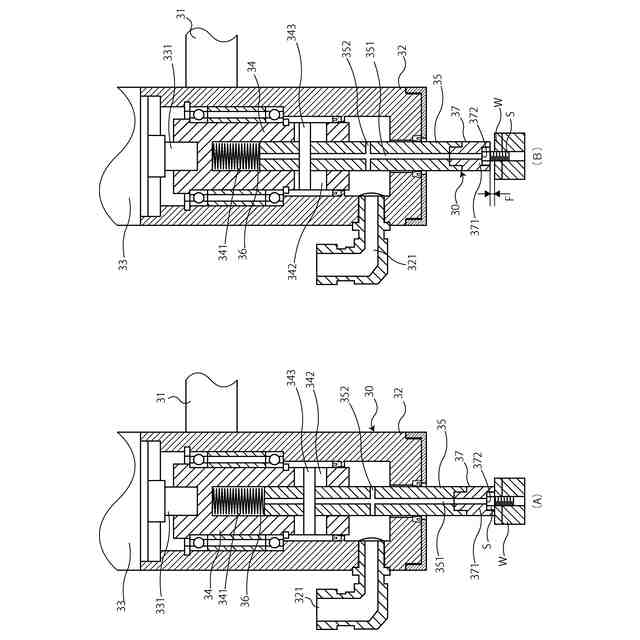
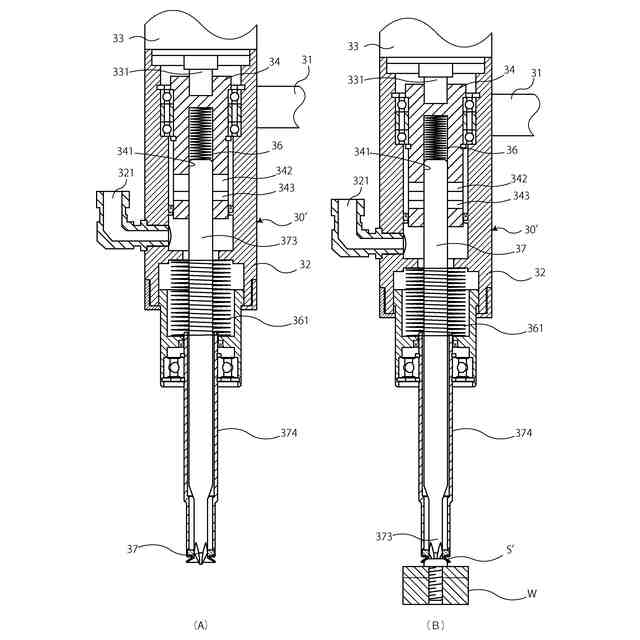
本発明に係るねじ締め装置のねじ締め完了状態を示す要部拡大一部切欠き断面側面図で、(A)はねじ浮きが発生していない状態での要部拡大一部切欠き断面側面図であり、(B)はねじ浮きが発生している状態での要部拡大一部切欠き断面側面図である。
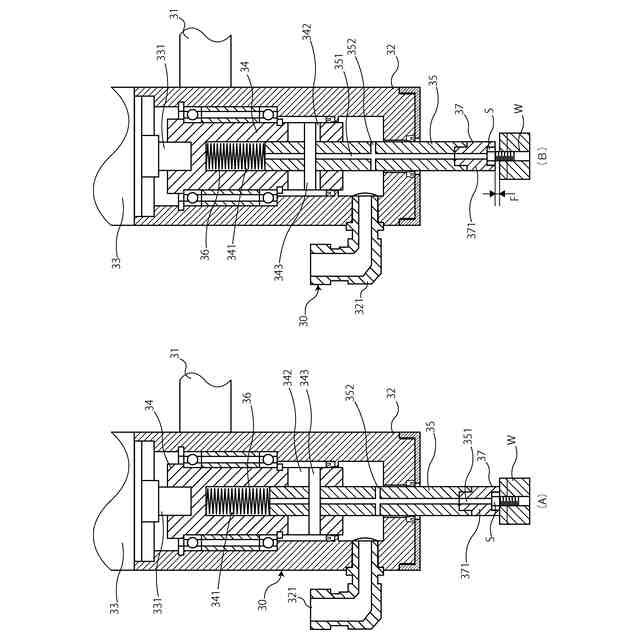
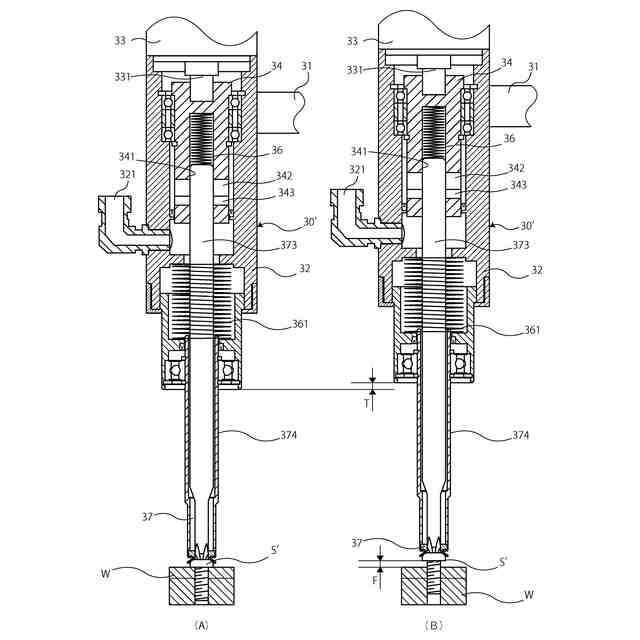
図3の状態から次の状態に移行した状態を示す要部拡大一部切欠き断面側面図で、(A)はねじ浮きが発生していない状態での要部拡大一部切欠き断面側面図であり、(B)はねじ浮きが発生している状態での要部拡大一部切欠き断面側面図である。
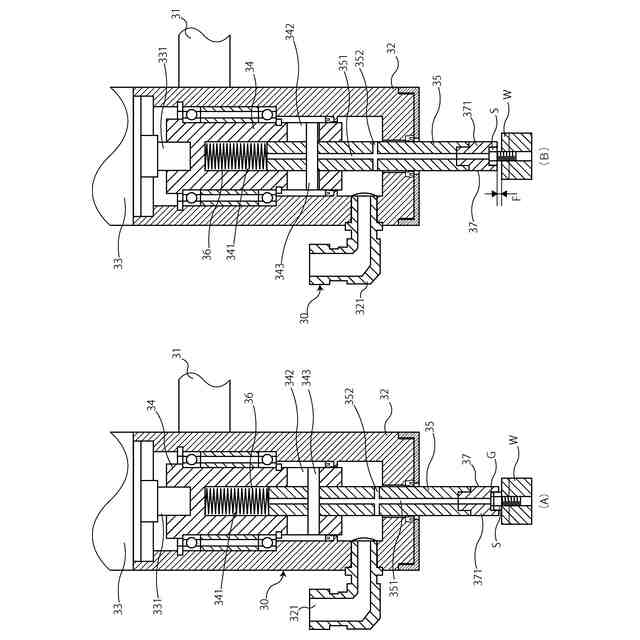
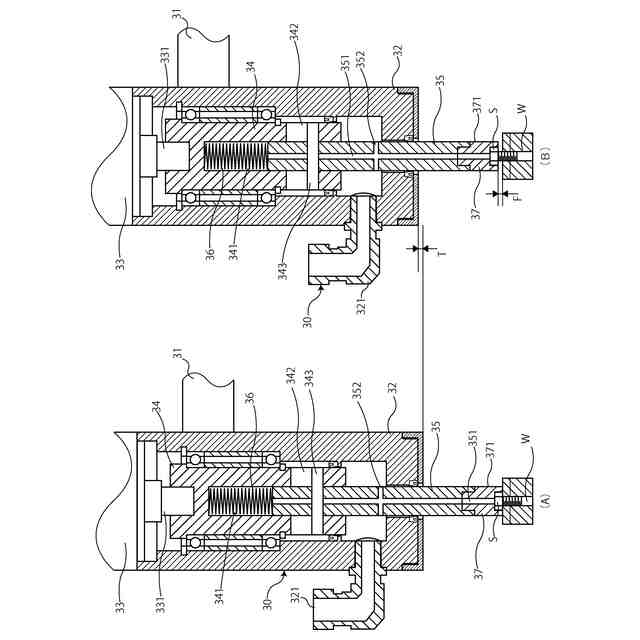
図4の状態から次の状態に移行した状態を示す要部拡大一部切欠き断面側面図で、(A)はねじ浮きが発生していない状態での要部拡大一部切欠き断面側面図であり、(B)はねじ浮きが発生している状態での要部拡大一部切欠き断面側面図である。
本発明に係るねじ締め装置の第二の実施形態の動作を示す要部拡大一部切欠き断面側面図で、(A)はねじ浮きが発生していない状態での要部拡大一部切欠き断面側面図であり、(B)はねじ浮きが発生している状態での要部拡大一部切欠き断面側面図である。
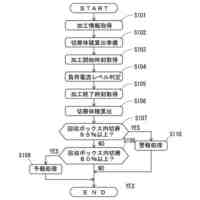
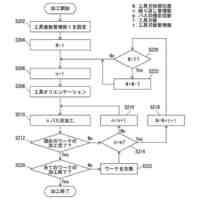
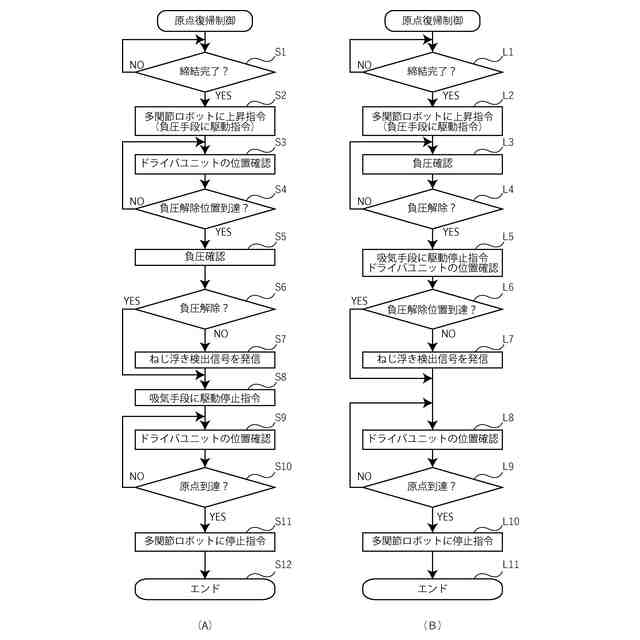
本発明にかかるねじ締め装置のねじ締め完了後の動作を示すフローチャートで有り、(a)は第一の実施形態でのフローチャートであり、(b)は第二の実施形態でのフローチャートである。
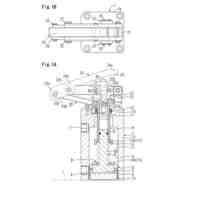
本発明に係るねじ締め装置の第三の実施形態を示す要部拡大一部切欠き断面側面図で、(a)は待機状態での要部拡大一部切欠き断面側面図であり、(b)はねじ締め完了状態の要部拡大一部切欠き断面側面図である。
本発明に係るねじ締め装置の第三の実施形態の動作を示す要部拡大一部切欠き断面側面図で、(A)はねじ浮きが発生していない状態での要部拡大一部切欠き断面側面図であり、(B)はねじ浮きが発生している状態での要部拡大一部切欠き断面側面図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態を図面に基づき説明する。図1において10は、ワークWに締結部品の一例であるねじSを締結するねじ締め装置である。このねじ締め装置10は、位置制御機構の一例である多関節ロボット20と、この多関節ロボット20に支持されるドライバユニット30と、これら多関節ロボット20およびドライバユニット30の駆動を制御する制御部40とを有している。なお、ねじSは、六角柱形状の頭部と、頭部と一体に形成されたおねじ部とを有している。
【0010】
前記多関節ロボット20は、複数個の腕部21と、これら腕部21を接続する複数個の関節部22とを備えている。この関節部22には、当該関節部22を中心に腕部21を揺動させる腕部揺動駆動源(図示せず)および当該関節部22を中心に腕部21を回転させる腕部回転駆動源(図示せず)が設けられており、これら駆動源は、前記制御部40により制御されている。このため、多関節ロボット20が駆動すると、その先端に装着された前記ドライバユニット30の位置および向きを任意に移動させることが可能となる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
搬送装置
17日前
日東精工株式会社
ねじ締め機
10日前
津田駒工業株式会社
工作機械
1か月前
個人
低周波振動発生出力方法
23日前
日東精工株式会社
ねじ締め機
3か月前
日東精工株式会社
ねじ締め機
10日前
日東精工株式会社
ねじ締め装置
2か月前
個人
パワーデバイスの接合方法
2か月前
日東精工株式会社
着座確認装置
1か月前
株式会社コスメック
クランプ装置
2か月前
ウエダ産業株式会社
カッター装置
1か月前
株式会社FUJI
工作機械
25日前
アズビル株式会社
溶接方法
1か月前
株式会社不二越
ドリル
1か月前
株式会社コスメック
着脱装置
3日前
津田駒工業株式会社
回転テーブル装置
2か月前
株式会社ダイヘン
アーク溶接制御方法
1か月前
株式会社ダイヘン
アーク溶接制御方法
5日前
株式会社ダイヘン
くびれ検出制御方法
5日前
個人
クーラント装置
1か月前
ニフコプラント株式会社
ろ過装置
3か月前
株式会社小島半田製造所
はんだ線
1か月前
株式会社不二越
管用タップ
1か月前
一文機工株式会社
スタッド溶接用プラグ
3か月前
株式会社不二越
複合加工機
3か月前
株式会社不二越
エンドミル
2か月前
株式会社FUJI
工具交換アーム
3か月前
工機ホールディングス株式会社
工具
1か月前
有限会社 ナプラ
接合材用金属粒子
13日前
株式会社不二越
歯車加工装置
20日前
株式会社ダイヘン
アークスタート制御方法
4か月前
株式会社FUJI
コレットチャック
2か月前
株式会社NMC
水溶性切削液用フィルター
3か月前
株式会社不二越
歯車製造装置
1か月前
ダイハツ工業株式会社
位置検出装置
1か月前
株式会社永木精機
埋設管窓開け工具
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ