TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024050181
公報種別
公開特許公報(A)
公開日
2024-04-10
出願番号
2022156866
出願日
2022-09-29
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01B
69/00 20060101AFI20240403BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
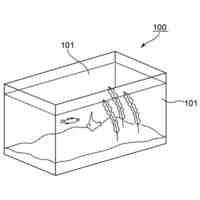
【課題】圃場の未作業領域を自動的に確認して作業を行えるようにすること。
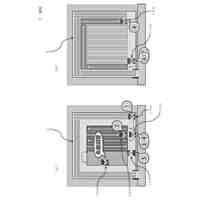
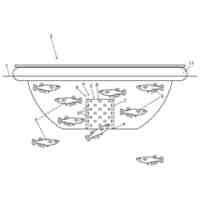
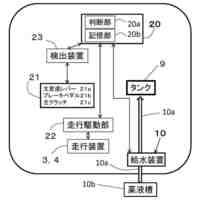
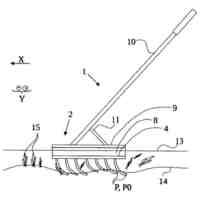
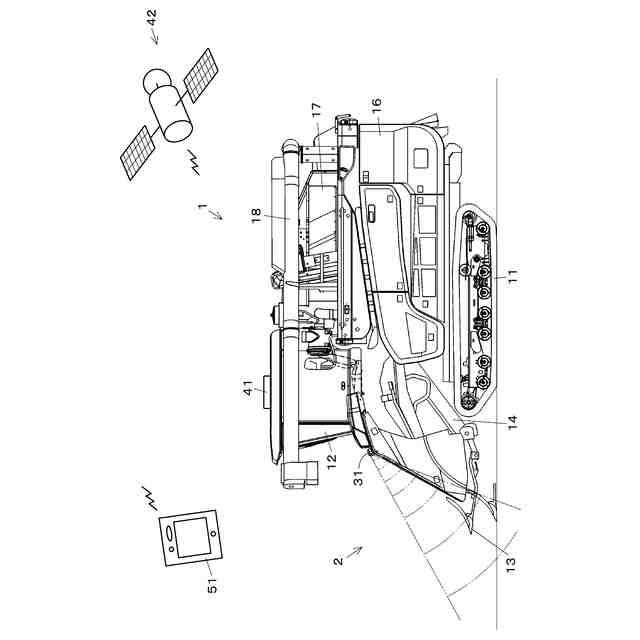
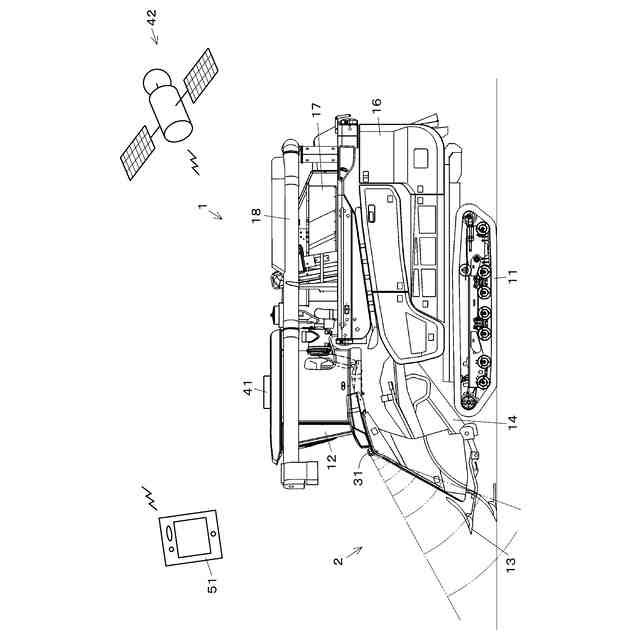
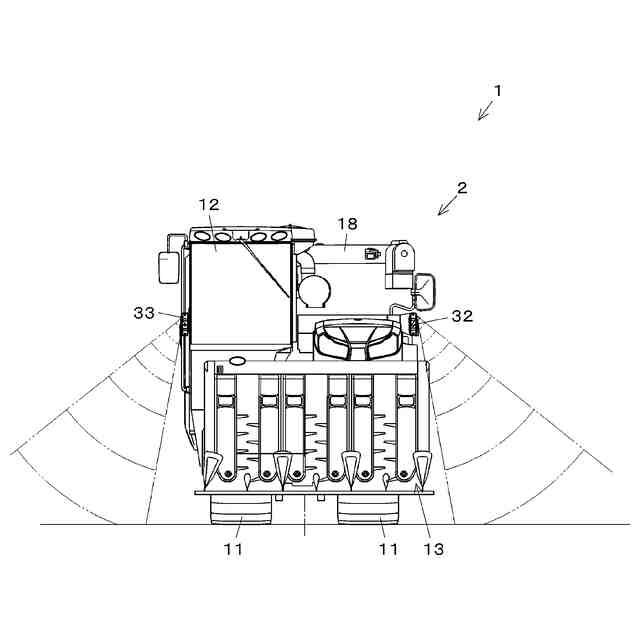
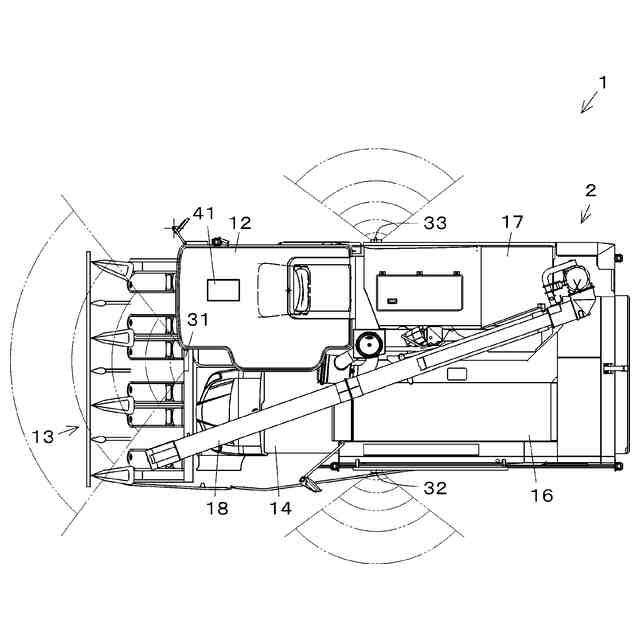
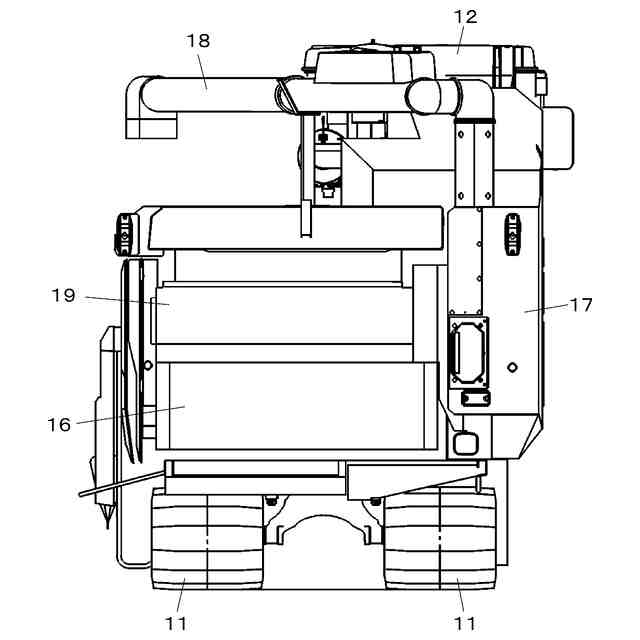
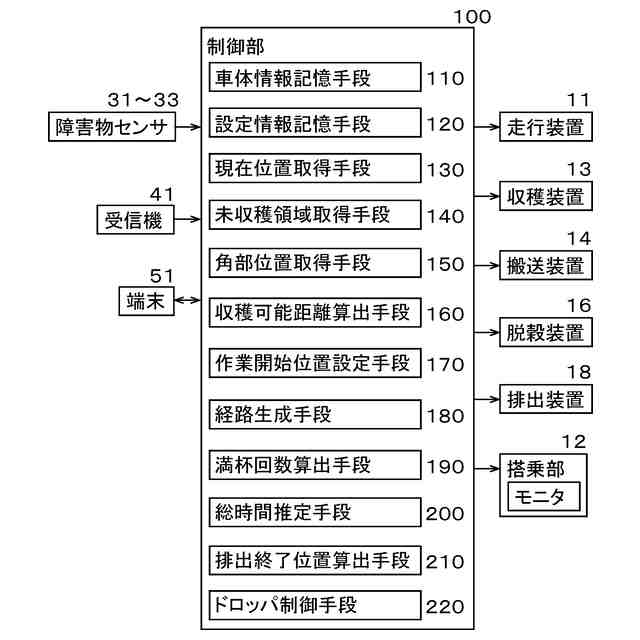
【解決手段】後部に作業機(13)を有する車体(2)と、車体(2)の現在位置を計測する現在位置計測手段(41)と、作業が行われる圃場(300)内の作物を検出する作物検出手段(31~33)の検出結果に基づいて、圃場(300)内の未作業領域(301)を取得する未作業領域取得手段(140)と、車体(2)の現在位置と、車体(2)の大きさと、未作業領域(310)とに基づいて、未作業領域(301)の作業を行う作業経路(321)を生成する経路生成手段(180)とを備えた作業車両(1)。
【選択図】図1
特許請求の範囲
【請求項1】
後部に作業機(13)を有する車体(2)と、
前記車体(2)の現在位置を計測する現在位置計測手段(41)と、
作業が行われる圃場(300)内の作物を検出する作物検出手段(31~33)の検出結果に基づいて、圃場(300)内の未作業領域(301)を取得する未作業領域取得手段(140)と、
前記車体(2)の現在位置と、前記車体(2)の大きさと、前記未作業領域(301)とに基づいて、前記未作業領域(301)の作業を行う作業経路(321)を生成する経路生成手段(180)と、
を備えたことを特徴とする作業車両。
続きを表示(約 1,800 文字)
【請求項2】
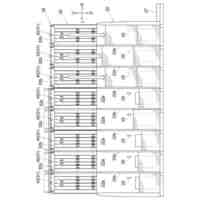
前記未作業領域(301)の角部の位置(311~314)と、前記車体(2)の現在位置と、予め定められた前記車体(2)の旋回方向と、に基づいて、前記現在位置から最も近い角部の位置を、前記作業経路(321)の作業開始位置(322)として前記作業経路(321)を生成する前記経路生成手段(180)、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項3】
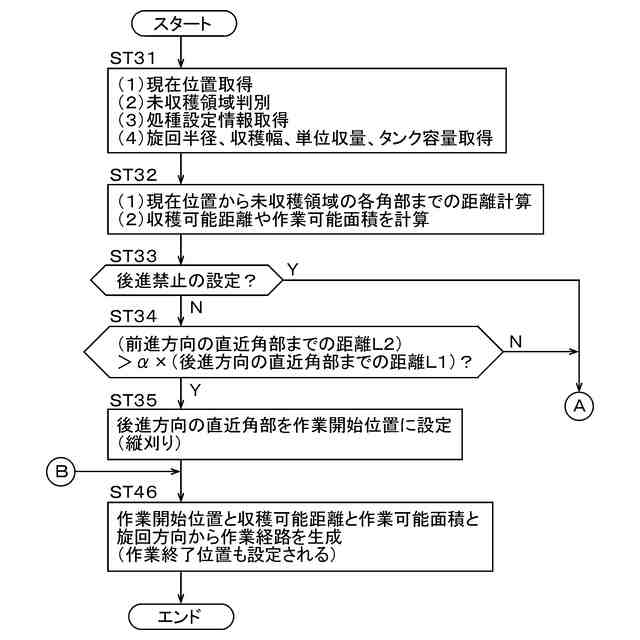
前記作業開始位置(322)まで後進して移動可能な場合には、前記現在位置から前記車体(2)が前進して到達可能な最も近い角部(312)と、前記現在位置から前記車体(2)が後進して到達可能な最も近い角部(311)と、の中で、移動距離(L1,L2)が短い角部を前記作業開始位置(322)として前記作業経路(321)を生成する前記経路生成手段(180)、
を備えたことを特徴とする請求項2に記載の作業車両。
【請求項4】
前記現在位置から最も近い直近角部(312)の位置と、次に近い次点角部(313)の位置と、前記未作業領域(301)の長手方向と、前記次点角部(313)へ向けて前記車体(2)が旋回する際に通過する旋回幅(L3)と、前記車体(2)の旋回半径(β)とに基づいて、前記直近角部(312)へ進入する際の方向が前記未作業領域(301)の短手方向である場合に、前記旋回幅(L3)が前記旋回半径(β)に達しない場合には前記直近角部(312)を前記作業開始位置(322)として作業経路(321)を生成する前記経路生成手段(180)、
を備えたことを特徴とする請求項3に記載の作業車両。
【請求項5】
作物を収穫する収穫装置で構成された前記作業機(13)と、収穫された作物が収容される容器(17)とを有する前記車体(2)と、
前記車体(2)の走行距離に対する前記作業機(13)での収量(B0)と、前記容器(17)の容量(V0)と、に基づいて、前記容器(17)が収穫された作物で満杯になるまでに前記車体(2)が走行可能な距離である作業可能距離(L0)を算出する作業可能距離算出手段(160)と、
前記旋回幅(L3)が前記旋回半径(β)に達する場合には、作業可能距離(L0)と作業経路(321)の長さとに基づく前記直近角部(312)と前記次点角部(313)との間の中割位置(315)を、前記作業開始位置(322)として前記作業経路(321)を生成する前記経路生成手段(180)と、
を備えたことを特徴とする請求項4に記載の作業車両。
【請求項6】
作物を収穫する収穫装置で構成された前記作業機(13)と、収穫された作物が収容される容器(17)とを有する前記車体(2)と、
前記車体(2)の走行距離に対する前記作業機(13)での収量(B0)と、前記容器(17)の容量(V0)と、前記未作業領域(301)の広さと、に基づいて、前記容器(17)が満杯になる回数(N0)を算出する満杯回数算出手段(190)と、
前記圃場(300)の外部に配置されて前記容器(17)の作物が移される第2の容器(21)に対して、前記車体(2)が作業終了位置(323)から前記第2の容器(21)の位置まで移動する時間(t1)と、前記第2の容器(21)に対して前記容器(17)から作物を移す時間(t2)と、前記第2の容器(21)の位置から作業開始位置(322)まで移動する時間(t3)と、前記満杯になる回数(N0)と、作物を収穫する時間(t4)と、に基づいて、圃場(300)の収穫作業にかかる総時間(t0)を推定する総時間推定手段(200)と、
推定された前記総時間(t0)が表示される表示部と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項7】
藁を束ねて排出するドロッパ機能を有する前記車体(2)と、
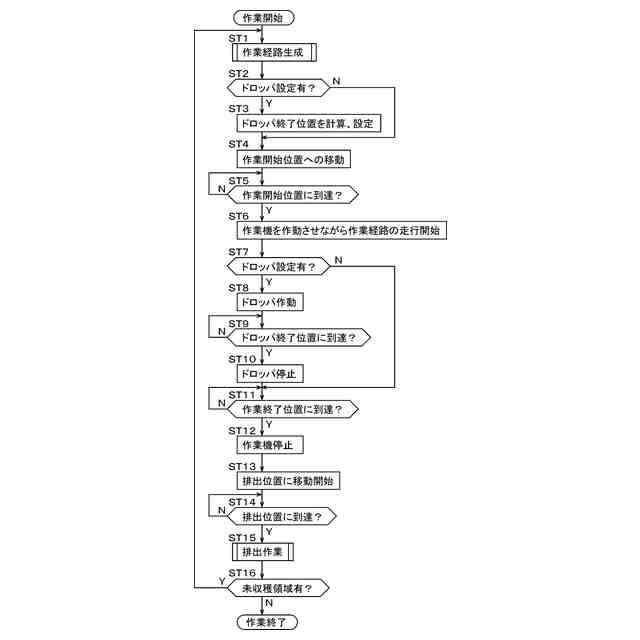
作業者の入力に応じて定められた藁束の量(D1)に応じて、藁束を排出しながら収穫作業を行う範囲(D2)を算出して、藁束の排出を終了する排出終了位置(324)を算出する排出終了位置算出手段(210)と、
前記車体(2)が前記排出終了位置(324)に到達した場合に、前記ドロッパ機能の作動を終了するドロッパ制御手段(220)と、
を備えたことを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、コンバインや、トラクタ等の作業車両に関し、特に、圃場内を自律走行可能な作業車両に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
コンバインやトラクタ等の作業車両において、GNSS(Global Navigation Satellite System、全球測位衛星システム)を利用して作業車両の現在位置を検出して、圃場内の未収穫領域を収穫しながら自動走行可能であると共に、圃場を撮像するカメラ等の撮像装置を使用して圃場内の障害物の種類を判別し、障害物が石や柱、倒木等の場合は車両を停止し、障害物が動物の場合は車両を減速し、障害物が人や農機の場合は減速後に停止する技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2020-178619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、圃場内の未収穫領域と既収穫領域について、予め情報を取得しておいて、作業経路を作成する必要がある。圃場での作業開始前の状態であれば、圃場全体を未収穫領域とすればよい。ここで、圃場での作業が複数の日に跨って収穫作業が途中で中断したり、穀粒タンク(グレンタンク)が満杯となりトラックのコンテナ(第2の容器)に移し替える作業が必要になって収穫作業が途中で中断したりすることがある。したがって、中断時には、中断直前の未収穫領域の情報を保存し、中断後の作業再開時に未収穫領域の情報を引き継ぐ必要がある。
【0005】
しかし、日を跨ぐ場合や移し替えの前後で作業者が休憩を取ったり、車両が故障したり藁が詰まるなどして、作業車両の電源が一度停止されてしまうと、未収穫領域の情報の引き継ぎができない場合がある。情報が引き継がれない場合は、作業を再開する際に、未収穫領域の情報を作業者が入力する必要があり、面倒であり、作業効率が低下する問題がある。情報を確実に引き継ぐには、全体が未収穫の状態から作業を開始して、作業車両の電源を停止せずに、その圃場について作業を最後まで完了する必要があり、圃場が広すぎる場合は対応できないといった制約や、作業開始時刻を早朝にしないと間に合わない等の制約が発生して、全体の作業効率が低下する場合がある。
【0006】
本発明は、圃場の未作業領域を自動的に確認して作業を行えるようにすることを技術的課題とする。
【課題を解決するための手段】
【0007】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、後部に作業機(13)を有する車体(2)と、前記車体(2)の現在位置を計測する現在位置計測手段(41)と、作業が行われる圃場(300)内の作物を検出する作物検出手段(31~33)の検出結果に基づいて、圃場(300)内の未作業領域(301)を取得する未作業領域取得手段(140)と、前記車体(2)の現在位置と、前記車体(2)の大きさと、前記未作業領域(301)とに基づいて、前記未作業領域(301)の作業を行う作業経路(321)を生成する経路生成手段(180)と、を備えたことを特徴とする作業車両である。
【0008】
請求項2に記載の発明は、前記未作業領域(301)の角部の位置(311~314)と、前記車体(2)の現在位置と、予め定められた前記車体(2)の旋回方向と、に基づいて、前記現在位置から最も近い角部の位置を、前記作業経路(321)の作業開始位置(322)として前記作業経路(321)を生成する前記経路生成手段(180)、を備えたことを特徴とする請求項1に記載の作業車両である。
【0009】
請求項3に記載の発明は、前記作業開始位置(322)まで後進して移動可能な場合には、前記現在位置から前記車体(2)が前進して到達可能な最も近い角部(312)と、前記現在位置から前記車体(2)が後進して到達可能な最も近い角部(311)と、の中で、移動距離(L1,L2)が短い角部を前記作業開始位置(322)として前記作業経路(321)を生成する前記経路生成手段(180)、を備えたことを特徴とする請求項2に記載の作業車両である。
【0010】
請求項4に記載の発明は、前記現在位置から最も近い直近角部(312)の位置と、次に近い次点角部(313)の位置と、前記未作業領域(301)の長手方向と、前記次点角部(313)へ向けて前記車体(2)が旋回する際に通過する旋回幅(L3)と、前記車体(2)の旋回半径(β)とに基づいて、前記直近角部(312)へ進入する際の方向が前記未作業領域(301)の短手方向である場合に、前記旋回幅(L3)が前記旋回半径(β)に達しない場合には前記直近角部(312)を前記作業開始位置(322)として作業経路(321)を生成する前記経路生成手段(180)、を備えたことを特徴とする請求項3に記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
産卵床
5日前
個人
魚釣用ルアー
27日前
個人
動物飼育用ケージ
12日前
個人
猫用のトイレ
12日前
株式会社シマノ
釣竿
今日
個人
計量カップ付き肥料袋
25日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
21日前
個人
水中生物採集器
5日前
個人
木造人工島の海産物農業
21日前
井関農機株式会社
収穫機
22日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
20日前
株式会社大貴
動物用トイレ
5日前
井関農機株式会社
苗移植機
12日前
株式会社大垣化工
糸収容具
13日前
日東電工株式会社
水槽
28日前
みのる産業株式会社
作業台車
14日前
井関農機株式会社
乗用型苗植機
1か月前
ロンタイ株式会社
植生体
12日前
井関農機株式会社
防除システム
19日前
井関農機株式会社
台木切断装置
25日前
カゴメ株式会社
トマト種子の製造方法
28日前
井関農機株式会社
乗用型作業機
今日
井関農機株式会社
乗用型苗植機
15日前
井関農機株式会社
乗用型苗移植機
1か月前
井関農機株式会社
農作業機用台車
28日前
MWPO株式会社
キャットタワー
5日前
個人
水田用除草機器および水田用除草体
13日前
株式会社クボタ
田植機
12日前
有限会社伊藤テクノリサーチ
防草施工方法
6日前
株式会社 ジークラック
ルアー
13日前
グローブライド株式会社
ルアー
22日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ